Oral Session 1: Deep Learning Theory and Causality Tue 7 Dec 12:00 a.m.
Building on the interpretation of a recurrent neural network (RNN) as a continuous-time neural differential equation, we show, under appropriate conditions, that the solution of a RNN can be viewed as a linear function of a specific feature set of the input sequence, known as the signature. This connection allows us to frame a RNN as a kernel method in a suitable reproducing kernel Hilbert space. As a consequence, we obtain theoretical guarantees on generalization and stability for a large class of recurrent networks. Our results are illustrated on simulated datasets.
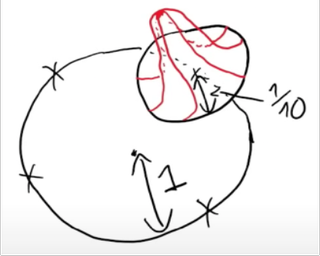
Causal effect identification is concerned with determining whether a causal effect is computable from a combination of qualitative assumptions about the underlying system (e.g., a causal graph) and distributions collected from this system. Many identification algorithms exclusively rely on graphical criteria made of a non-trivial combination of probability axioms, do-calculus, and refined c-factorization (e.g., Lee & Bareinboim, 2020). In a sequence of increasingly sophisticated results, it has been shown how proxy variables can be used to identify certain effects that would not be otherwise recoverable in challenging scenarios through solving matrix equations (e.g., Kuroki & Pearl, 2014; Miao et al., 2018). In this paper, we develop a new causal identification algorithm which utilizes both graphical criteria and matrix equations. Specifically, we first characterize the relationships between certain graphically-driven formulae and matrix multiplications. With such characterizations, we broaden the spectrum of proxy variable based identification conditions and further propose novel intermediary criteria based on the pseudoinverse of a matrix. Finally, we devise a causal effect identification algorithm, which accepts as input a collection of marginal, conditional, and interventional distributions, integrating enriched matrix-based criteria into a graphical identification approach.
Oral Session 1: Deep Learning Tue 7 Dec 12:00 a.m.
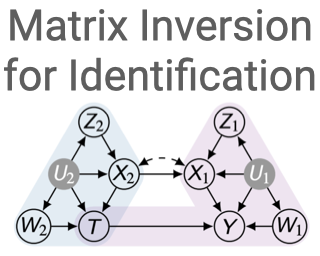
As major progress is made in open-ended text generation, measuring how close machine-generated text is to human language remains a critical open problem. We introduce Mauve, a comparison measure for open-ended text generation, which directly compares the learnt distribution from a text generation model to the distribution of human-written text using divergence frontiers. Mauve scales up to modern text generation models by computing information divergences in a quantized embedding space. Through an extensive empirical study on three open-ended generation tasks, we find that Mauve identifies known properties of generated text, scales naturally with model size, and correlates with human judgments, with fewer restrictions than existing distributional evaluation metrics.
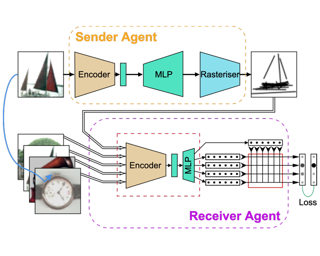
Evidence that visual communication preceded written language and provided a basis for it goes back to prehistory, in forms such as cave and rock paintings depicting traces of our distant ancestors. Emergent communication research has sought to explore how agents can learn to communicate in order to collaboratively solve tasks. Existing research has focused on language, with a learned communication channel transmitting sequences of discrete tokens between the agents. In this work, we explore a visual communication channel between agents that are allowed to draw with simple strokes. Our agents are parameterised by deep neural networks, and the drawing procedure is differentiable, allowing for end-to-end training. In the framework of a referential communication game, we demonstrate that agents can not only successfully learn to communicate by drawing, but with appropriate inductive biases, can do so in a fashion that humans can interpret. We hope to encourage future research to consider visual communication as a more flexible and directly interpretable alternative of training collaborative agents.
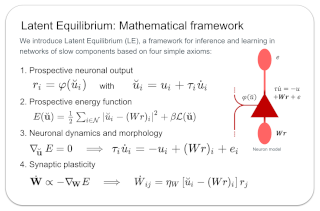
The response time of physical computational elements is finite, and neurons are no exception. In hierarchical models of cortical networks each layer thus introduces a response lag. This inherent property of physical dynamical systems results in delayed processing of stimuli and causes a timing mismatch between network output and instructive signals, thus afflicting not only inference, but also learning. We introduce Latent Equilibrium, a new framework for inference and learning in networks of slow components which avoids these issues by harnessing the ability of biological neurons to phase-advance their output with respect to their membrane potential. This principle enables quasi-instantaneous inference independent of network depth and avoids the need for phased plasticity or computationally expensive network relaxation phases. We jointly derive disentangled neuron and synapse dynamics from a prospective energy function that depends on a network's generalized position and momentum. The resulting model can be interpreted as a biologically plausible approximation of error backpropagation in deep cortical networks with continuous-time, leaky neuronal dynamics and continuously active, local plasticity. We demonstrate successful learning of standard benchmark datasets, achieving competitive performance using both fully-connected and convolutional architectures, and show how our principle can be applied to detailed models of cortical microcircuitry. Furthermore, …
Oral Session 1: Generative Modeling Tue 7 Dec 12:00 a.m.
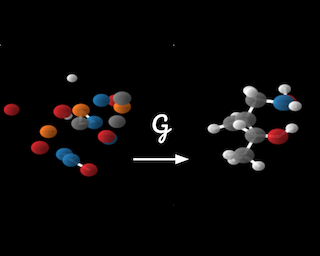
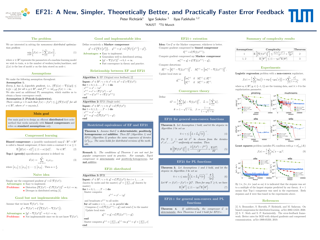
This paper introduces a generative model equivariant to Euclidean symmetries: E(n) Equivariant Normalizing Flows (E-NFs). To construct E-NFs, we take the discriminative E(n) graph neural networks and integrate them as a differential equation to obtain an invertible equivariant function: a continuous-time normalizing flow. We demonstrate that E-NFs considerably outperform baselines and existing methods from the literature on particle systems such as DW4 and LJ13, and on molecules from QM9 in terms of log-likelihood. To the best of our knowledge, this is the first flow that jointly generates molecule features and positions in 3D.
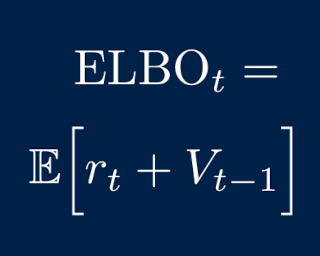
We present a variational method for online state estimation and parameter learning in state-space models (SSMs), a ubiquitous class of latent variable models for sequential data. As per standard batch variational techniques, we use stochastic gradients to simultaneously optimize a lower bound on the log evidence with respect to both model parameters and a variational approximation of the states' posterior distribution. However, unlike existing approaches, our method is able to operate in an entirely online manner, such that historic observations do not require revisitation after being incorporated and the cost of updates at each time step remains constant, despite the growing dimensionality of the joint posterior distribution of the states. This is achieved by utilizing backward decompositions of this joint posterior distribution and of its variational approximation, combined with Bellman-type recursions for the evidence lower bound and its gradients. We demonstrate the performance of this methodology across several examples, including high-dimensional SSMs and sequential Variational Auto-Encoders.
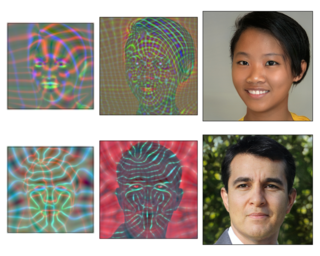
We observe that despite their hierarchical convolutional nature, the synthesis process of typical generative adversarial networks depends on absolute pixel coordinates in an unhealthy manner. This manifests itself as, e.g., detail appearing to be glued to image coordinates instead of the surfaces of depicted objects. We trace the root cause to careless signal processing that causes aliasing in the generator network. Interpreting all signals in the network as continuous, we derive generally applicable, small architectural changes that guarantee that unwanted information cannot leak into the hierarchical synthesis process. The resulting networks match the FID of StyleGAN2 but differ dramatically in their internal representations, and they are fully equivariant to translation and rotation even at subpixel scales. Our results pave the way for generative models better suited for video and animation.
Datasets and Benchmarks: Dataset and Benchmark Track 1 Tue 7 Dec 12:00 a.m.
The Datasets and Benchmarks track serves as a novel venue for high-quality publications, talks, and posters on highly valuable machine learning datasets and benchmarks, as well as a forum for discussions on how to improve dataset development. Datasets and benchmarks are crucial for the development of machine learning methods, but also require their own publishing and reviewing guidelines. For instance, datasets can often not be reviewed in a double-blind fashion, and hence full anonymization will not be required. On the other hand, they do require additional specific checks, such as a proper description of how the data was collected, whether they show intrinsic bias, and whether they will remain accessible.
Oral Session 1: Theory Tue 7 Dec 12:00 a.m.
Oral Session 2: Deep Learning Tue 7 Dec 01:00 a.m.
Neural networks have achieved success in a wide array of perceptual tasks but often fail at tasks involving both perception and higher-level reasoning. On these more challenging tasks, bespoke approaches (such as modular symbolic components, independent dynamics models or semantic parsers) targeted towards that specific type of task have typically performed better. The downside to these targeted approaches, however, is that they can be more brittle than general-purpose neural networks, requiring significant modification or even redesign according to the particular task at hand. Here, we propose a more general neural-network-based approach to dynamic visual reasoning problems that obtains state-of-the-art performance on three different domains, in each case outperforming bespoke modular approaches tailored specifically to the task. Our method relies on learned object-centric representations, self-attention and self-supervised dynamics learning, and all three elements together are required for strong performance to emerge. The success of this combination suggests that there may be no need to trade off flexibility for performance on problems involving spatio-temporal or causal-style reasoning. With the right soft biases and learning objectives in a neural network we may be able to attain the best of both worlds.
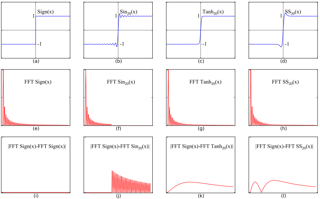
Binary neural networks (BNNs) represent original full-precision weights and activations into 1-bit with sign function. Since the gradient of the conventional sign function is almost zero everywhere which cannot be used for back-propagation, several attempts have been proposed to alleviate the optimization difficulty by using approximate gradient. However, those approximations corrupt the main direction of factual gradient. To this end, we propose to estimate the gradient of sign function in the Fourier frequency domain using the combination of sine functions for training BNNs, namely frequency domain approximation (FDA). The proposed approach does not affect the low-frequency information of the original sign function which occupies most of the overall energy, and high-frequency coefficients will be ignored to avoid the huge computational overhead. In addition, we embed a noise adaptation module into the training phase to compensate the approximation error. The experiments on several benchmark datasets and neural architectures illustrate that the binary network learned using our method achieves the state-of-the-art accuracy. Code will be available at https://gitee.com/mindspore/models/tree/master/research/cv/FDA-BNN.
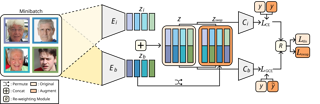
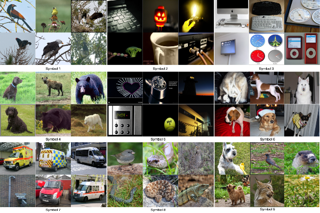
Image classification models tend to make decisions based on peripheral attributes of data items that have strong correlation with a target variable (i.e., dataset bias). These biased models suffer from the poor generalization capability when evaluated on unbiased datasets. Existing approaches for debiasing often identify and emphasize those samples with no such correlation (i.e., bias-conflicting) without defining the bias type in advance. However, such bias-conflicting samples are significantly scarce in biased datasets, limiting the debiasing capability of these approaches. This paper first presents an empirical analysis revealing that training with "diverse" bias-conflicting samples beyond a given training set is crucial for debiasing as well as the generalization capability. Based on this observation, we propose a novel feature-level data augmentation technique in order to synthesize diverse bias-conflicting samples. To this end, our method learns the disentangled representation of (1) the intrinsic attributes (i.e., those inherently defining a certain class) and (2) bias attributes (i.e., peripheral attributes causing the bias), from a large number of bias-aligned samples, the bias attributes of which have strong correlation with the target variable. Using the disentangled representation, we synthesize bias-conflicting samples that contain the diverse intrinsic attributes of bias-aligned samples by swapping their latent features. By …
Oral Session 2: Optimization Tue 7 Dec 01:00 a.m.

Quality diversity (QD) is a growing branch of stochastic optimization research that studies the problem of generating an archive of solutions that maximize a given objective function but are also diverse with respect to a set of specified measure functions. However, even when these functions are differentiable, QD algorithms treat them as "black boxes", ignoring gradient information. We present the differentiable quality diversity (DQD) problem, a special case of QD, where both the objective and measure functions are first order differentiable. We then present MAP-Elites via a Gradient Arborescence (MEGA), a DQD algorithm that leverages gradient information to efficiently explore the joint range of the objective and measure functions. Results in two QD benchmark domains and in searching the latent space of a StyleGAN show that MEGA significantly outperforms state-of-the-art QD algorithms, highlighting DQD's promise for efficient quality diversity optimization when gradient information is available. Source code is available at https://github.com/icaros-usc/dqd.
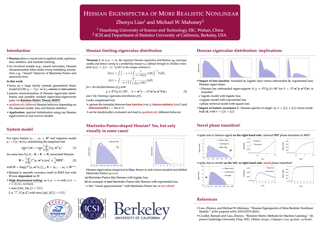
Given an optimization problem, the Hessian matrix and its eigenspectrum can be used in many ways, ranging from designing more efficient second-order algorithms to performing model analysis and regression diagnostics. When nonlinear models and non-convex problems are considered, strong simplifying assumptions are often made to make Hessian spectral analysis more tractable.This leads to the question of how relevant the conclusions of such analyses are for realistic nonlinear models. In this paper, we exploit tools from random matrix theory to make a precise characterization of the Hessian eigenspectra for a broad family of nonlinear models that extends the classical generalized linear models, without relying on strong simplifying assumptions used previously. We show that, depending on the data properties, the nonlinear response model, and the loss function, the Hessian can have qualitatively different spectral behaviors: of bounded or unbounded support, with single- or multi-bulk, and with isolated eigenvalues on the left- or right-hand side of the main eigenvalue bulk. By focusing on such a simple but nontrivial model, our analysis takes a step forward to unveil the theoretical origin of many visually striking features observed in more realistic machine learning models.
Oral Session 2: Theory Tue 7 Dec 01:00 a.m.
We consider a novel data driven approach for designing semi-supervised learning algorithms that can effectively learn with only a small number of labeled examples. We focus on graph-based techniques, where the unlabeled examples are connected in a graph under the implicit assumption that similar nodes likely have similar labels. Over the past two decades, several elegant graph-based semi-supervised learning algorithms for inferring the labels of the unlabeled examples given the graph and a few labeled examples have been proposed. However, the problem of how to create the graph (which impacts the practical usefulness of these methods significantly) has been relegated to heuristics and domain-specific art, and no general principles have been proposed. In this work we present a novel data driven approach for learning the graph and provide strong formal guarantees in both the distributional and online learning formalizations. We show how to leverage problem instances coming from an underlying problem domain to learn the graph hyperparameters for commonly used parametric families of graphs that provably perform well on new instances from the same domain. We obtain low regret and efficient algorithms in the online setting, and generalization guarantees in the distributional setting. We also show how to combine several …
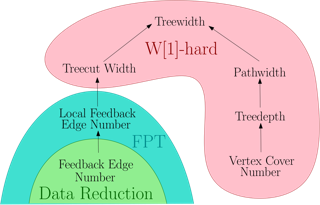
We investigate the parameterized complexity of Bayesian Network Structure Learning (BNSL), a classical problem that has received significant attention in empirical but also purely theoretical studies. We follow up on previous works that have analyzed the complexity of BNSL w.r.t. the so-called superstructure of the input. While known results imply that BNSL is unlikely to be fixed-parameter tractable even when parameterized by the size of a vertex cover in the superstructure, here we show that a different kind of parameterization - notably by the size of a feedback edge set - yields fixed-parameter tractability. We proceed by showing that this result can be strengthened to a localized version of the feedback edge set, and provide corresponding lower bounds that complement previous results to provide a complexity classification of BNSL w.r.t. virtually all well-studied graph parameters.We then analyze how the complexity of BNSL depends on the representation of the input. In particular, while the bulk of past theoretical work on the topic assumed the use of the so-called non-zero representation, here we prove that if an additive representation can be used instead then BNSL becomes fixed-parameter tractable even under significantly milder restrictions to the superstructure, notably when parameterized by the treewidth …
Oral Session 2: Reinforcement Learning Tue 7 Dec 01:00 a.m.
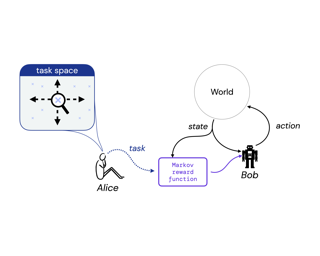
Reward is the driving force for reinforcement-learning agents. This paper is dedicated to understanding the expressivity of reward as a way to capture tasks that we would want an agent to perform. We frame this study around three new abstract notions of “task” that might be desirable: (1) a set of acceptable behaviors, (2) a partial ordering over behaviors, or (3) a partial ordering over trajectories. Our main results prove that while reward can express many of these tasks, there exist instances of each task type that no Markov reward function can capture. We then provide a set of polynomial-time algorithms that construct a Markov reward function that allows an agent to optimize tasks of each of these three types, and correctly determine when no such reward function exists. We conclude with an empirical study that corroborates and illustrates our theoretical findings.
Affinity Workshop: Queer in AI Workshop 1 Tue 7 Dec 05:00 a.m.
Queer in AI’s demographic survey reveals that most queer scientists in our community do not feel completely welcome in conferences and their work environments, with the main reasons being a lack of queer community and role models. Over the past years, Queer in AI has worked towards these goals, yet we have observed that the voices of marginalized queer communities - especially transgender, non-binary folks and queer BIPOC folks - have been neglected. The purpose of this workshop is to highlight issues that these communities face by featuring talks and panel discussions on the inclusion of neuro-diverse people in our communities, the intersection of queer and animal rights, as well as worker rights issues around the world.
The main topics of the workshop will revolve around:
- the intersection of AI, queer identity and neurodiversity
- queer identity and labor rights and organization
- AI and animal rights
- queer identity and caste-based discrimination
Additionally, at Queer in AI’s socials at NeurIPS 2021, we will focus on creating a safe and inclusive casual networking and socializing space for LGBTQIA+ individuals involved with AI. There will also be additional social events, stay tuned for more details coming soon. Together, these components will create a community space where attendees can learn and grow from connecting with each other, bonding over shared experiences, and learning from each individual’s unique insights into AI, queerness, and beyond!
Affinity Workshop: New in ML 1 Tue 7 Dec 06:02 a.m.
Is this your first time to a top conference? Have you ever wanted your own work recognized by this huge and active community? Do you encounter difficulties in polishing your ideas, experiments, paper writing, etc? Then, this session is exactly for you!
This year, we are organizing the New in ML workshop, co-locating with NeurIPS 2021. We are targeting anyone who has not published a paper at the NeurIPS main conference yet. We invited top researchers to review your work and share with you their experience. The best papers will get oral presentations!
Our biggest goal is to help you publish papers at next year’s NeurIPS conference, and generally provide you with the guidance you need to contribute to ML research fully and effectively!
Invited Talk: Luis von Ahn
How Duolingo Uses AI to Assess, Engage and Teach Better
Duolingo is the most popular way to learn languages in the world. With over half a billion exercises completed every day, we have the largest dataset of people learning languages ever amassed. In this talk I will describe all the different ways in which we use AI to improve how well we teach and how to keep our learners engaged.
Bio :
Demonstrations 1 Tue 7 Dec 08:30 a.m.
Demonstrations must show novel technology and must run online during the conference. Unlike poster presentations or slide shows, interaction with the audience is a critical element. Therefore, the creativity of demonstrators to propose new ways in which interaction and engagement can fully leverage this year’s virtual conference format will be particularly relevant for selection. This session has the following demonstrations:
- Interactive Exploration for 60 Years of AI Research
- SenSE: A Toolkit for Semantic Change Exploration via Word Embedding Alignment
- Training Transformers Together
- GANs for All: Supporting Fun and Intuitive Exploration of GAN Latent Spaces
- Lesan - Machine Translation for Low Resource Languages
Poster Session 1 Tue 7 Dec 08:30 a.m.
[ Virtual ]
[ Virtual ]
One of the key drivers of complexity in the classical (stochastic) multi-armed bandit (MAB) problem is the difference between mean rewards in the top two arms, also known as the instance gap. The celebrated Upper Confidence Bound (UCB) policy is among the simplest optimism-based MAB algorithms that naturally adapts to this gap: for a horizon of play n, it achieves optimal O(log n) regret in instances with "large" gaps, and a near-optimal O(\sqrt{n log n}) minimax regret when the gap can be arbitrarily "small." This paper provides new results on the arm-sampling behavior of UCB, leading to several important insights. Among these, it is shown that arm-sampling rates under UCB are asymptotically deterministic, regardless of the problem complexity. This discovery facilitates new sharp asymptotics and a novel alternative proof for the O(\sqrt{n log n}) minimax regret of UCB. Furthermore, the paper also provides the first complete process-level characterization of the MAB problem in the conventional diffusion scaling. Among other things, the "small" gap worst-case lens adopted in this paper also reveals profound distinctions between the behavior of UCB and Thompson Sampling, such as an "incomplete learning" phenomenon characteristic of the latter.
[ Virtual ]
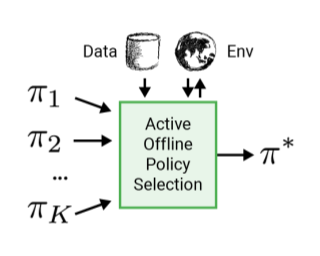
This paper addresses the problem of policy selection in domains with abundant logged data, but with a restricted interaction budget. Solving this problem would enable safe evaluation and deployment of offline reinforcement learning policies in industry, robotics, and recommendation domains among others. Several off-policy evaluation (OPE) techniques have been proposed to assess the value of policies using only logged data. However, there is still a big gap between the evaluation by OPE and the full online evaluation in the real environment. Yet, large amounts of online interactions are often not possible in practice. To overcome this problem, we introduce active offline policy selection --- a novel sequential decision approach that combines logged data with online interaction to identify the best policy. This approach uses OPE estimates to warm start the online evaluation. Then, in order to utilize the limited environment interactions wisely we decide which policy to evaluate next based on a Bayesian optimization method with a kernel function that represents policy similarity. We use multiple benchmarks with a large number of candidate policies to show that the proposed approach improves upon state-of-the-art OPE estimates and pure online policy evaluation.
[ Virtual ]
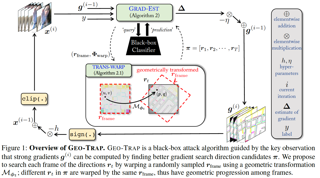
When compared to the image classification models, black-box adversarial attacks against video classification models have been largely understudied. This could be possible because, with video, the temporal dimension poses significant additional challenges in gradient estimation. Query-efficient black-box attacks rely on effectively estimated gradients towards maximizing the probability of misclassifying the target video. In this work, we demonstrate that such effective gradients can be searched for by parameterizing the temporal structure of the search space with geometric transformations. Specifically, we design a novel iterative algorithm GEOmetric TRAnsformed Perturbations (GEO-TRAP), for attacking video classification models. GEO-TRAP employs standard geometric transformation operations to reduce the search space for effective gradients into searching for a small group of parameters that define these operations. This group of parameters describes the geometric progression of gradients, resulting in a reduced and structured search space. Our algorithm inherently leads to successful perturbations with surprisingly few queries. For example, adversarial examples generated from GEO-TRAP have better attack success rates with ~73.55% fewer queries compared to the state-of-the-art method for video adversarial attacks on the widely used Jester dataset. Overall, our algorithm exposes vulnerabilities of diverse video classification models and achieves new state-of-the-art results under black-box settings on two large …
[ Virtual ]
Current SOTA adversarially robust models are mostly based on adversarial training (AT) and differ only by some regularizers either at inner maximization or outer minimization steps. Being repetitive in nature during the inner maximization step, they take a huge time to train. We propose a non-iterative method that enforces the following ideas during training. Attribution maps are more aligned to the actual object in the image for adversarially robust models compared to naturally trained models. Also, the allowed set of pixels to perturb an image (that changes model decision) should be restricted to the object pixels only, which reduces the attack strength by limiting the attack space. Our method achieves significant performance gains with a little extra effort (10-20%) over existing AT models and outperforms all other methods in terms of adversarial as well as natural accuracy. We have performed extensive experimentation with CIFAR-10, CIFAR-100, and TinyImageNet datasets and reported results against many popular strong adversarial attacks to prove the effectiveness of our method.
[ Virtual ]
Articulation-centric 2D/3D pose supervision forms the core training objective in most existing 3D human pose estimation techniques. Except for synthetic source environments, acquiring such rich supervision for each real target domain at deployment is highly inconvenient. However, we realize that standard foreground silhouette estimation techniques (on static camera feeds) remain unaffected by domain-shifts. Motivated by this, we propose a novel target adaptation framework that relies only on silhouette supervision to adapt a source-trained model-based regressor. However, in the absence of any auxiliary cue (multi-view, depth, or 2D pose), an isolated silhouette loss fails to provide a reliable pose-specific gradient and requires to be employed in tandem with a topology-centric loss. To this end, we develop a series of convolution-friendly spatial transformations in order to disentangle a topological-skeleton representation from the raw silhouette. Such a design paves the way to devise a Chamfer-inspired spatial topological-alignment loss via distance field computation, while effectively avoiding any gradient hindering spatial-to-pointset mapping. Experimental results demonstrate our superiority against prior-arts in self-adapting a source trained model to diverse unlabeled target domains, such as a) in-the-wild datasets, b) low-resolution image domains, and c) adversarially perturbed image domains (via UAP).
[ Virtual ]
[ Virtual ]

While deep learning reshaped the classical motion capture pipeline with feed-forward networks, generative models are required to recover fine alignment via iterative refinement. Unfortunately, the existing models are usually hand-crafted or learned in controlled conditions, only applicable to limited domains. We propose a method to learn a generative neural body model from unlabelled monocular videos by extending Neural Radiance Fields (NeRFs). We equip them with a skeleton to apply to time-varying and articulated motion. A key insight is that implicit models require the inverse of the forward kinematics used in explicit surface models. Our reparameterization defines spatial latent variables relative to the pose of body parts and thereby overcomes ill-posed inverse operations with an overparameterization. This enables learning volumetric body shape and appearance from scratch while jointly refining the articulated pose; all without ground truth labels for appearance, pose, or 3D shape on the input videos. When used for novel-view-synthesis and motion capture, our neural model improves accuracy on diverse datasets.
[ Virtual ]
A Bayesian treatment can mitigate overconfidence in ReLU nets around the training data. But far away from them, ReLU Bayesian neural networks (BNNs) can still underestimate uncertainty and thus be asymptotically overconfident. This issue arises since the output variance of a BNN with finitely many features is quadratic in the distance from the data region. Meanwhile, Bayesian linear models with ReLU features converge, in the infinite-width limit, to a particular Gaussian process (GP) with a variance that grows cubically so that no asymptotic overconfidence can occur. While this may seem of mostly theoretical interest, in this work, we show that it can be used in practice to the benefit of BNNs. We extend finite ReLU BNNs with infinite ReLU features via the GP and show that the resulting model is asymptotically maximally uncertain far away from the data while the BNNs' predictive power is unaffected near the data. Although the resulting model approximates a full GP posterior, thanks to its structure, it can be applied post-hoc to any pre-trained ReLU BNN at a low cost.
[ Virtual ]
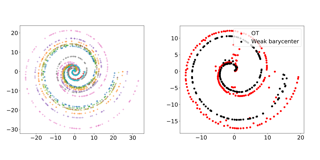
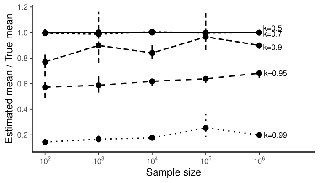
We introduce weak barycenters of a family of probability distributions, based on the recently developed notion of optimal weak transport of mass by Gozlan et al. (2017) and Backhoff-Veraguas et al. (2020). We provide a theoretical analysis of this object and discuss its interpretation in the light of convex ordering between probability measures. In particular, we show that, rather than averaging the input distributions in a geometric way (as the Wasserstein barycenter based on classic optimal transport does) weak barycenters extract common geometric information shared by all the input distributions, encoded as a latent random variable that underlies all of them. We also provide an iterative algorithm to compute a weak barycenter for a finite family of input distributions, and a stochastic algorithm that computes them for arbitrary populations of laws. The latter approach is particularly well suited for the streaming setting, i.e., when distributions are observed sequentially. The notion of weak barycenter and our approaches to compute it are illustrated on synthetic examples, validated on 2D real-world data and compared to standard Wasserstein barycenters.
[ Virtual ]
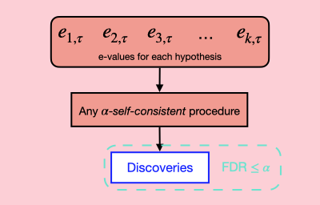
In bandit multiple hypothesis testing, each arm corresponds to a different null hypothesis that we wish to test, and the goal is to design adaptive algorithms that correctly identify large set of interesting arms (true discoveries), while only mistakenly identifying a few uninteresting ones (false discoveries). One common metric in non-bandit multiple testing is the false discovery rate (FDR). We propose a unified, modular framework for bandit FDR control that emphasizes the decoupling of exploration and summarization of evidence. We utilize the powerful martingale-based concept of "e-processes" to ensure FDR control for arbitrary composite nulls, exploration rules and stopping times in generic problem settings. In particular, valid FDR control holds even if the reward distributions of the arms could be dependent, multiple arms may be queried simultaneously, and multiple (cooperating or competing) agents may be querying arms, covering combinatorial semi-bandit type settings as well. Prior work has considered in great detail the setting where each arm's reward distribution is independent and sub-Gaussian, and a single arm is queried at each step. Our framework recovers matching sample complexity guarantees in this special case, and performs comparably or better in practice. For other settings, sample complexities will depend on the finer details …
[ Virtual ]
[ Virtual ]
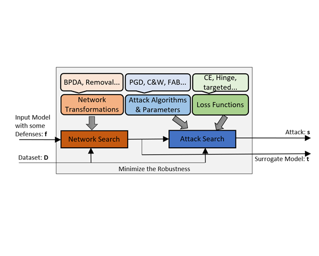
Reliable evaluation of adversarial defenses is a challenging task, currently limited to an expert who manually crafts attacks that exploit the defense’s inner workings, or to approaches based on ensemble of fixed attacks, none of which may be effective for the specific defense at hand. Our key observation is that adaptive attacks are composed from a set of reusable building blocks that can be formalized in a search space and used to automatically discover attacks for unknown defenses. We evaluated our approach on 24 adversarial defenses and show that it outperforms AutoAttack, the current state-of-the-art tool for reliable evaluation of adversarial defenses: our tool discovered significantly stronger attacks by producing 3.0%-50.8% additional adversarial examples for 10 models, while obtaining attacks with slightly stronger or similar strength for the remaining models.
[ Virtual ]
A wide variety of NLP applications, such as machine translation, summarization, and dialog, involve text generation. One major challenge for these applications is how to evaluate whether such generated texts are actually fluent, accurate, or effective. In this work, we conceptualize the evaluation of generated text as a text generation problem, modeled using pre-trained sequence-to-sequence models. The general idea is that models trained to convert the generated text to/from a reference output or the source text will achieve higher scores when the generated text is better. We operationalize this idea using BART, an encoder-decoder based pre-trained model, and propose a metric BARTScore with a number of variants that can be flexibly applied in an unsupervised fashion to evaluation of text from different perspectives (e.g. informativeness, fluency, or factuality). BARTScore is conceptually simple and empirically effective. It can outperform existing top-scoring metrics in 16 of 22 test settings, covering evaluation of 16 datasets (e.g., machine translation, text summarization) and 7 different perspectives (e.g., informativeness, factuality). Code to calculate BARTScore is available at https://github.com/neulab/BARTScore, and we have released an interactive leaderboard for meta-evaluation at http://explainaboard.nlpedia.ai/leaderboard/task-meval/ on the ExplainaBoard platform, which allows us to interactively understand the strengths, weaknesses, and complementarity of each …
[ Virtual ]
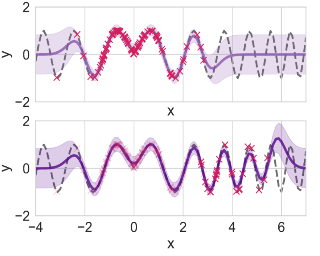
Bayesian optimization is a sample-efficient black-box optimization procedure that is typically applied to a small number of independent objectives. However, in practice we often wish to optimize objectives defined over many correlated outcomes (or “tasks”). For example, scientists may want to optimize the coverage of a cell tower network across a dense grid of locations. Similarly, engineers may seek to balance the performance of a robot across dozens of different environments via constrained or robust optimization. However, the Gaussian Process (GP) models typically used as probabilistic surrogates for multi-task Bayesian optimization scale poorly with the number of outcomes, greatly limiting applicability. We devise an efficient technique for exact multi-task GP sampling that combines exploiting Kronecker structure in the covariance matrices with Matheron’s identity, allowing us to perform Bayesian optimization using exact multi-task GP models with tens of thousands of correlated outputs. In doing so, we achieve substantial improvements in sample efficiency compared to existing approaches that model solely the outcome metrics. We demonstrate how this unlocks a new class of applications for Bayesian optimization across a range of tasks in science and engineering, including optimizing interference patterns of an optical interferometer with 65,000 outputs.
[ Virtual ]
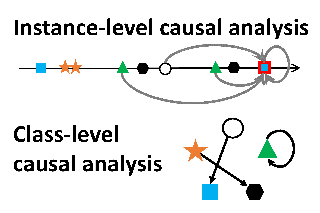
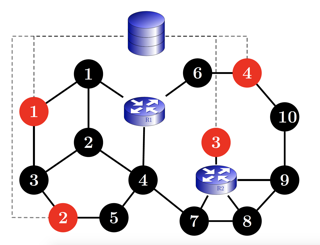
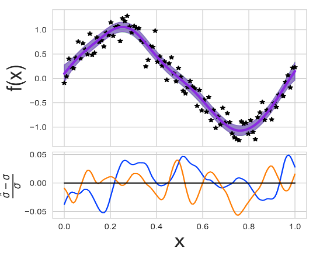
We propose a new sparse Granger-causal learning framework for temporal event data. We focus on a specific class of point processes called the Hawkes process. We begin by pointing out that most of the existing sparse causal learning algorithms for the Hawkes process suffer from a singularity in maximum likelihood estimation. As a result, their sparse solutions can appear only as numerical artifacts. In this paper, we propose a mathematically well-defined sparse causal learning framework based on a cardinality-regularized Hawkes process, which remedies the pathological issues of existing approaches. We leverage the proposed algorithm for the task of instance-wise causal event analysis, where sparsity plays a critical role. We validate the proposed framework with two real use-cases, one from the power grid and the other from the cloud data center management domain.
[ Virtual ]
Current black-box variational inference (BBVI) methods require the user to make numerous design choices – such as the selection of variational objective and approximating family – yet there is little principled guidance on how to do so. We develop a conceptual framework and set of experimental tools to understand the effects of these choices, which we leverage to propose best practices for maximizing posterior approximation accuracy. Our approach is based on studying the pre-asymptotic tail behavior of the density ratios between the joint distribution and the variational approximation, then exploiting insights and tools from the importance sampling literature. Our framework and supporting experiments help to distinguish between the behavior of BBVI methods for approximating low-dimensional versus moderate-to-high-dimensional posteriors. In the latter case, we show that mass-covering variational objectives are difficult to optimize and do not improve accuracy, but flexible variational families can improve accuracy and the effectiveness of importance sampling – at the cost of additional optimization challenges. Therefore, for moderate-to-high-dimensional posteriors we recommend using the (mode-seeking) exclusive KL divergence since it is the easiest to optimize, and improving the variational family or using model parameter transformations to make the posterior and optimal variational approximation more similar. On the other …
[ Virtual ]
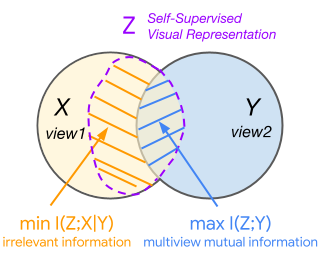
Learning effective visual representations that generalize well without human supervision is a fundamental problem in order to apply Machine Learning to a wide variety of tasks. Recently, two families of self-supervised methods, contrastive learning and latent bootstrapping, exemplified by SimCLR and BYOL respectively, have made significant progress. In this work, we hypothesize that adding explicit information compression to these algorithms yields better and more robust representations. We verify this by developing SimCLR and BYOL formulations compatible with the Conditional Entropy Bottleneck (CEB) objective, allowing us to both measure and control the amount of compression in the learned representation, and observe their impact on downstream tasks. Furthermore, we explore the relationship between Lipschitz continuity and compression, showing a tractable lower bound on the Lipschitz constant of the encoders we learn. As Lipschitz continuity is closely related to robustness, this provides a new explanation for why compressed models are more robust. Our experiments confirm that adding compression to SimCLR and BYOL significantly improves linear evaluation accuracies and model robustness across a wide range of domain shifts. In particular, the compressed version of BYOL achieves 76.0% Top-1 linear evaluation accuracy on ImageNet with ResNet-50, and 78.8% with ResNet-50 2x.
[ Virtual ]
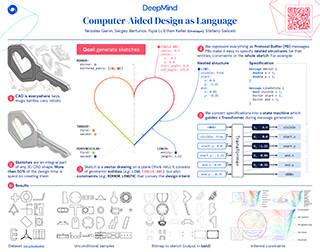
Computer-Aided Design (CAD) applications are used in manufacturing to model everything from coffee mugs to sports cars. These programs are complex and require years of training and experience to master. A component of all CAD models particularly difficult to make are the highly structured 2D sketches that lie at the heart of every 3D construction. In this work, we propose a machine learning model capable of automatically generating such sketches. Through this, we pave the way for developing intelligent tools that would help engineers create better designs with less effort. The core of our method is a combination of a general-purpose language modeling technique alongside an off-the-shelf data serialization protocol. Additionally, we explore several extensions allowing us to gain finer control over the generation process. We show that our approach has enough flexibility to accommodate the complexity of the domain and performs well for both unconditional synthesis and image-to-sketch translation.
[ Virtual ]
[ Virtual ]
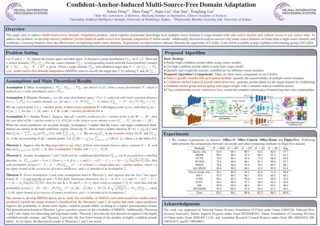
Unsupervised domain adaptation has attracted appealing academic attentions by transferring knowledge from labeled source domain to unlabeled target domain. However, most existing methods assume the source data are drawn from a single domain, which cannot be successfully applied to explore complementarily transferable knowledge from multiple source domains with large distribution discrepancies. Moreover, they require access to source data during training, which are inefficient and unpractical due to privacy preservation and memory storage. To address these challenges, we develop a novel Confident-Anchor-induced multi-source-free Domain Adaptation (CAiDA) model, which is a pioneer exploration of knowledge adaptation from multiple source domains to the unlabeled target domain without any source data, but with only pre-trained source models. Specifically, a source-specific transferable perception module is proposed to automatically quantify the contributions of the complementary knowledge transferred from multi-source domains to the target domain. To generate pseudo labels for the target domain without access to the source data, we develop a confident-anchor-induced pseudo label generator by constructing a confident anchor group and assigning each unconfident target sample with a semantic-nearest confident anchor. Furthermore, a class-relationship-aware consistency loss is proposed to preserve consistent inter-class relationships by aligning soft confusion matrices across domains. Theoretical analysis answers why multi-source …
[ Virtual ]
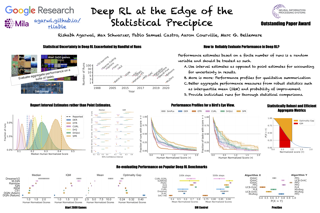
Deep reinforcement learning (RL) algorithms are predominantly evaluated by comparing their relative performance on a large suite of tasks. Most published results on deep RL benchmarks compare point estimates of aggregate performance such as mean and median scores across tasks, ignoring the statistical uncertainty implied by the use of a finite number of training runs. Beginning with the Arcade Learning Environment (ALE), the shift towards computationally-demanding benchmarks has led to the practice of evaluating only a small number of runs per task, exacerbating the statistical uncertainty in point estimates. In this paper, we argue that reliable evaluation in the few run deep RL regime cannot ignore the uncertainty in results without running the risk of slowing down progress in the field. We illustrate this point using a case study on the Atari 100k benchmark, where we find substantial discrepancies between conclusions drawn from point estimates alone versus a more thorough statistical analysis. With the aim of increasing the field's confidence in reported results with a handful of runs, we advocate for reporting interval estimates of aggregate performance and propose performance profiles to account for the variability in results, as well as present more robust and efficient aggregate metrics, such as …
[ Virtual ]
Deep neural networks (DNNs) have shown to perform very well on large scale object recognition problems and lead to widespread use for real-world applications, including situations where DNN are implemented as “black boxes”. A promising approach to secure their use is to accept decisions that are likely to be correct while discarding the others. In this work, we propose DOCTOR, a simple method that aims to identify whether the prediction of a DNN classifier should (or should not) be trusted so that, consequently, it would be possible to accept it or to reject it. Two scenarios are investigated: Totally Black Box (TBB) where only the soft-predictions are available and Partially Black Box (PBB) where gradient-propagation to perform input pre-processing is allowed. Empirically, we show that DOCTOR outperforms all state-of-the-art methods on various well-known images and sentiment analysis datasets. In particular, we observe a reduction of up to 4% of the false rejection rate (FRR) in the PBB scenario. DOCTOR can be applied to any pre-trained model, it does not require prior information about the underlying dataset and is as simple as the simplest available methods in the literature.
[ Virtual ]
[ Virtual ]
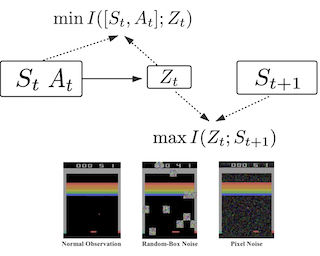
Exploration methods based on pseudo-count of transitions or curiosity of dynamics have achieved promising results in solving reinforcement learning with sparse rewards. However, such methods are usually sensitive to environmental dynamics-irrelevant information, e.g., white-noise. To handle such dynamics-irrelevant information, we propose a Dynamic Bottleneck (DB) model, which attains a dynamics-relevant representation based on the information-bottleneck principle. Based on the DB model, we further propose DB-bonus, which encourages the agent to explore state-action pairs with high information gain. We establish theoretical connections between the proposed DB-bonus, the upper confidence bound (UCB) for linear case, and the visiting count for tabular case. We evaluate the proposed method on Atari suits with dynamics-irrelevant noises. Our experiments show that exploration with DB bonus outperforms several state-of-the-art exploration methods in noisy environments.
[ Virtual ]
We propose a method for object-aware 3D egocentric pose estimation that tightly integrates kinematics modeling, dynamics modeling, and scene object information. Unlike prior kinematics or dynamics-based approaches where the two components are used disjointly, we synergize the two approaches via dynamics-regulated training. At each timestep, a kinematic model is used to provide a target pose using video evidence and simulation state. Then, a prelearned dynamics model attempts to mimic the kinematic pose in a physics simulator. By comparing the pose instructed by the kinematic model against the pose generated by the dynamics model, we can use their misalignment to further improve the kinematic model. By factoring in the 6DoF pose of objects (e.g., chairs, boxes) in the scene, we demonstrate for the first time, the ability to estimate physically-plausible 3D human-object interactions using a single wearable camera. We evaluate our egocentric pose estimation method in both controlled laboratory settings and real-world scenarios.
[ Virtual ]
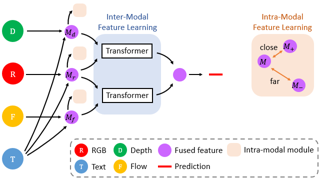
We address the problem of text-guided video temporal grounding, which aims to identify the time interval of a certain event based on a natural language description. Different from most existing methods that only consider RGB images as visual features, we propose a multi-modal framework to extract complementary information from videos. Specifically, we adopt RGB images for appearance, optical flow for motion, and depth maps for image structure. While RGB images provide abundant visual cues of certain events, the performance may be affected by background clutters. Therefore, we use optical flow to focus on large motion and depth maps to infer the scene configuration when the action is related to objects recognizable with their shapes. To integrate the three modalities more effectively and enable inter-modal learning, we design a dynamic fusion scheme with transformers to model the interactions between modalities. Furthermore, we apply intra-modal self-supervised learning to enhance feature representations across videos for each modality, which also facilitates multi-modal learning. We conduct extensive experiments on the Charades-STA and ActivityNet Captions datasets, and show that the proposed method performs favorably against state-of-the-art approaches.
[ Virtual ]
[ Virtual ]
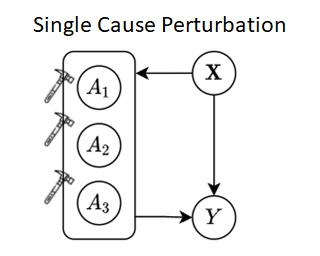
Most existing methods for conditional average treatment effect estimation are designed to estimate the effect of a single cause - only one variable can be intervened on at one time. However, many applications involve simultaneous intervention on multiple variables, which leads to multi-cause treatment effect problems. The multi-cause problem is challenging because one needs to overcome the confounding bias for a large number of treatment groups, each with a different cause combination. The combinatorial nature of the problem also leads to severe data scarcity - we only observe one factual outcome out of many potential outcomes. In this work, we propose Single-cause Perturbation (SCP), a novel two-step procedure to estimate the multi-cause treatment effect. SCP starts by augmenting the observational dataset with the estimated potential outcomes under single-cause interventions. It then performs covariate adjustment on the augmented dataset to obtain the estimator. SCP is agnostic to the exact choice of algorithm in either step. We show formally that the procedure is valid under standard assumptions in causal inference. We demonstrate the performance gain of SCP on extensive synthetic and semi-synthetic experiments.
[ Virtual ]
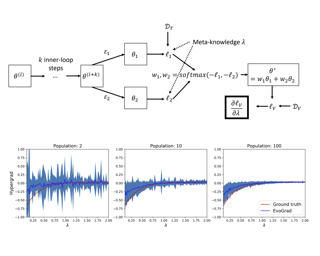
Gradient-based meta-learning and hyperparameter optimization have seen significant progress recently, enabling practical end-to-end training of neural networks together with many hyperparameters. Nevertheless, existing approaches are relatively expensive as they need to compute second-order derivatives and store a longer computational graph. This cost prevents scaling them to larger network architectures. We present EvoGrad, a new approach to meta-learning that draws upon evolutionary techniques to more efficiently compute hypergradients. EvoGrad estimates hypergradient with respect to hyperparameters without calculating second-order gradients, or storing a longer computational graph, leading to significant improvements in efficiency. We evaluate EvoGrad on three substantial recent meta-learning applications, namely cross-domain few-shot learning with feature-wise transformations, noisy label learning with Meta-Weight-Net and low-resource cross-lingual learning with meta representation transformation. The results show that EvoGrad significantly improves efficiency and enables scaling meta-learning to bigger architectures such as from ResNet10 to ResNet34.
[ Virtual ]
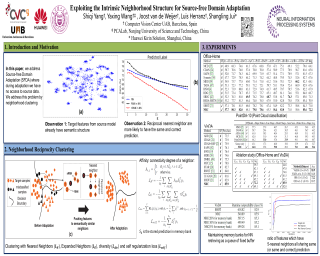
Domain adaptation (DA) aims to alleviate the domain shift between source domain and target domain. Most DA methods require access to the source data, but often that is not possible (e.g. due to data privacy or intellectual property). In this paper, we address the challenging source-free domain adaptation (SFDA) problem, where the source pretrained model is adapted to the target domain in the absence of source data. Our method is based on the observation that target data, which might no longer align with the source domain classifier, still forms clear clusters. We capture this intrinsic structure by defining local affinity of the target data, and encourage label consistency among data with high local affinity. We observe that higher affinity should be assigned to reciprocal neighbors, and propose a self regularization loss to decrease the negative impact of noisy neighbors. Furthermore, to aggregate information with more context, we consider expanded neighborhoods with small affinity values. In the experimental results we verify that the inherent structure of the target features is an important source of information for domain adaptation. We demonstrate that this local structure can be efficiently captured by considering the local neighbors, the reciprocal neighbors, and the expanded neighborhood. Finally, …
[ Virtual ]
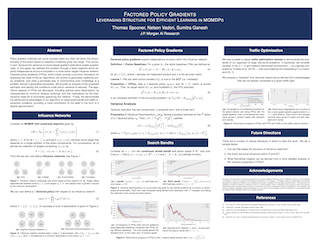
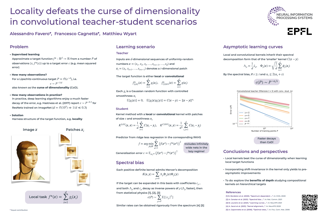
Policy gradient methods can solve complex tasks but often fail when the dimensionality of the action-space or objective multiplicity grow very large. This occurs, in part, because the variance on score-based gradient estimators scales quadratically. In this paper, we address this problem through a factor baseline which exploits independence structure encoded in a novel action-target influence network. Factored policy gradients (FPGs), which follow, provide a common framework for analysing key state-of-the-art algorithms, are shown to generalise traditional policy gradients, and yield a principled way of incorporating prior knowledge of a problem domain's generative processes. We provide an analysis of the proposed estimator and identify the conditions under which variance is reduced. The algorithmic aspects of FPGs are discussed, including optimal policy factorisation, as characterised by minimum biclique coverings, and the implications for the bias variance trade-off of incorrectly specifying the network. Finally, we demonstrate the performance advantages of our algorithm on large-scale bandit and traffic intersection problems, providing a novel contribution to the latter in the form of a spatial approximation.
[ Virtual ]
[ Virtual ]
[ Virtual ]
Studying the sensitivity of weight perturbation in neural networks and its impacts on model performance, including generalization and robustness, is an active research topic due to its implications on a wide range of machine learning tasks such as model compression, generalization gap assessment, and adversarial attacks. In this paper, we provide the first integral study and analysis for feed-forward neural networks in terms of the robustness in pairwise class margin and its generalization behavior under weight perturbation. We further design a new theory-driven loss function for training generalizable and robust neural networks against weight perturbations. Empirical experiments are conducted to validate our theoretical analysis. Our results offer fundamental insights for characterizing the generalization and robustness of neural networks against weight perturbations.
[ Virtual ]
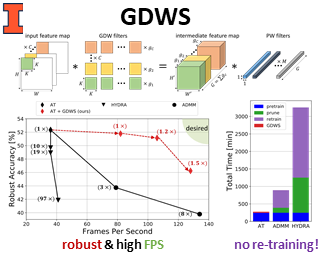
Despite their tremendous successes, convolutional neural networks (CNNs) incur high computational/storage costs and are vulnerable to adversarial perturbations. Recent works on robust model compression address these challenges by combining model compression techniques with adversarial training. But these methods are unable to improve throughput (frames-per-second) on real-life hardware while simultaneously preserving robustness to adversarial perturbations. To overcome this problem, we propose the method of Generalized Depthwise-Separable (GDWS) convolution - an efficient, universal, post-training approximation of a standard 2D convolution. GDWS dramatically improves the throughput of a standard pre-trained network on real-life hardware while preserving its robustness. Lastly, GDWS is scalable to large problem sizes since it operates on pre-trained models and doesn't require any additional training. We establish the optimality of GDWS as a 2D convolution approximator and present exact algorithms for constructing optimal GDWS convolutions under complexity and error constraints. We demonstrate the effectiveness of GDWS via extensive experiments on CIFAR-10, SVHN, and ImageNet datasets. Our code can be found at https://github.com/hsndbk4/GDWS.
[ Virtual ]
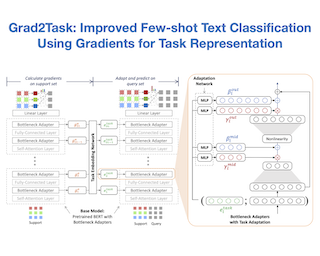
Large pretrained language models (LMs) like BERT have improved performance in many disparate natural language processing (NLP) tasks. However, fine tuning such models requires a large number of training examples for each target task. Simultaneously, many realistic NLP problems are "few shot", without a sufficiently large training set. In this work, we propose a novel conditional neural process-based approach for few-shot text classification that learns to transfer from other diverse tasks with rich annotation. Our key idea is to represent each task using gradient information from a base model and to train an adaptation network that modulates a text classifier conditioned on the task representation. While previous task-aware few-shot learners represent tasks by input encoding, our novel task representation is more powerful, as the gradient captures input-output relationships of a task. Experimental results show that our approach outperforms traditional fine-tuning, sequential transfer learning, and state-of-the-art meta learning approaches on a collection of diverse few-shot tasks. We further conducted analysis and ablations to justify our design choices.
[ Virtual ]
[ Virtual ]
Various recent proposals increase the distinguishing power of Graph Neural Networks (GNNs) by propagating features between k-tuples of vertices. The distinguishing power of these “higher-order” GNNs is known to be bounded by the k-dimensional Weisfeiler-Leman (WL) test, yet their O(n^k) memory requirements limit their applicability. Other proposals infuse GNNs with local higher-order graph structural information from the start, hereby inheriting the desirable O(n) memory requirement from GNNs at the cost of a one-time, possibly non-linear, preprocessing step. We propose local graph parameter enabled GNNs as a framework for studying the latter kind of approaches and precisely characterize their distinguishing power, in terms of a variant of the WL test, and in terms of the graph structural properties that they can take into account. Local graph parameters can be added to any GNN architecture, and are cheap to compute. In terms of expressive power, our proposal lies in the middle of GNNs and their higher-order counterparts. Further, we propose several techniques to aide in choosing the right local graph parameters. Our results connect GNNs with deep results in finite model theory and finite variable logics. Our experimental evaluation shows that adding local graph parameters often has a positive effect for a …
[ Virtual ]

We present neural radiance fields for rendering and temporal (4D) reconstruction of humans in motion (H-NeRF), as captured by a sparse set of cameras or even from a monocular video. Our approach combines ideas from neural scene representation, novel-view synthesis, and implicit statistical geometric human representations, coupled using novel loss functions. Instead of learning a radiance field with a uniform occupancy prior, we constrain it by a structured implicit human body model, represented using signed distance functions. This allows us to robustly fuse information from sparse views and generalize well beyond the poses or views observed in training. Moreover, we apply geometric constraints to co-learn the structure of the observed subject -- including both body and clothing -- and to regularize the radiance field to geometrically plausible solutions. Extensive experiments on multiple datasets demonstrate the robustness and the accuracy of our approach, its generalization capabilities significantly outside a small training set of poses and views, and statistical extrapolation beyond the observed shape.
[ Virtual ]
Performance on the most commonly used Visual Question Answering dataset (VQA v2) is starting to approach human accuracy. However, in interacting with state-of-the-art VQA models, it is clear that the problem is far from being solved. In order to stress test VQA models, we benchmark them against human-adversarial examples. Human subjects interact with a state-of-the-art VQA model, and for each image in the dataset, attempt to find a question where the model’s predicted answer is incorrect. We find that a wide range of state-of-the-art models perform poorly when evaluated on these examples. We conduct an extensive analysis of the collected adversarial examples and provide guidance on future research directions. We hope that this Adversarial VQA (AdVQA) benchmark can help drive progress in the field and advance the state of the art.
[ Virtual ]
Partial Domain Adaptation (PDA) addresses the unsupervised domain adaptation problem where the target label space is a subset of the source label space. Most state-of-art PDA methods tackle the inconsistent label space by assigning weights to classes or individual samples, in an attempt to discard the source data that belongs to the irrelevant classes. However, we believe samples from those extra categories would still contain valuable information to promote positive transfer. In this paper, we propose the Implicit Semantic Response Alignment to explore the intrinsic relationships among different categories by applying a weighted schema on the feature level. Specifically, we design a class2vec module to extract the implicit semantic topics from the visual features. With an attention layer, we calculate the semantic response according to each implicit semantic topic. Then semantic responses of source and target data are aligned to retain the relevant information contained in multiple categories by weighting the features, instead of samples. Experiments on several cross-domain benchmark datasets demonstrate the effectiveness of our method over the state-of-the-art PDA methods. Moreover, we elaborate in-depth analyses to further explore implicit semantic alignment.
[ Virtual ]
Neural networks lack adversarial robustness, i.e., they are vulnerable to adversarial examples that through small perturbations to inputs cause incorrect predictions. Further, trust is undermined when models give miscalibrated predictions, i.e., the predicted probability is not a good indicator of how much we should trust our model. In this paper, we study the connection between adversarial robustness and calibration and find that the inputs for which the model is sensitive to small perturbations (are easily attacked) are more likely to have poorly calibrated predictions. Based on this insight, we examine if calibration can be improved by addressing those adversarially unrobust inputs. To this end, we propose Adversarial Robustness based Adaptive Label Smoothing (AR-AdaLS) that integrates the correlations of adversarial robustness and calibration into training by adaptively softening labels for an example based on how easily it can be attacked by an adversary. We find that our method, taking the adversarial robustness of the in-distribution data into consideration, leads to better calibration over the model even under distributional shifts. In addition, AR-AdaLS can also be applied to an ensemble model to further improve model calibration.
[ Virtual ]
[ Virtual ]
As deep networks begin to be deployed as autonomous agents, the issue of how they can communicate with each other becomes important. Here, we train two deep nets from scratch to perform realistic referent identification through unsupervised emergent communication. We show that the largely interpretable emergent protocol allows the nets to successfully communicate even about object types they did not see at training time. The visual representations induced as a by-product of our training regime, moreover, show comparable quality, when re-used as generic visual features, to a recent self-supervised learning model. Our results provide concrete evidence of the viability of (interpretable) emergent deep net communication in a more realistic scenario than previously considered, as well as establishing an intriguing link between this field and self-supervised visual learning.
[ Virtual ]

Question answering (QA) models are well-known to exploit data bias, e.g., the language prior in visual QA and the position bias in reading comprehension. Recent debiasing methods achieve good out-of-distribution (OOD) generalizability with a considerable sacrifice of the in-distribution (ID) performance. Therefore, they are only applicable in domains where the test distribution is known in advance. In this paper, we present a novel debiasing method called Introspective Distillation (IntroD) to make the best of both worlds for QA. Our key technical contribution is to blend the inductive bias of OOD and ID by introspecting whether a training sample fits in the factual ID world or the counterfactual OOD one. Experiments on visual QA datasets VQA v2, VQA-CP, and reading comprehension dataset SQuAD demonstrate that our proposed IntroD maintains the competitive OOD performance compared to other debiasing methods, while sacrificing little or even achieving better ID performance compared to the non-debiasing ones.
[ Virtual ]
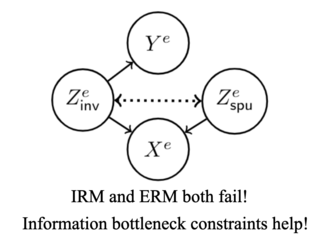
The invariance principle from causality is at the heart of notable approaches such as invariant risk minimization (IRM) that seek to address out-of-distribution (OOD) generalization failures. Despite the promising theory, invariance principle-based approaches fail in common classification tasks, where invariant (causal) features capture all the information about the label. Are these failures due to the methods failing to capture the invariance? Or is the invariance principle itself insufficient? To answer these questions, we revisit the fundamental assumptions in linear regression tasks, where invariance-based approaches were shown to provably generalize OOD. In contrast to the linear regression tasks, we show that for linear classification tasks we need much stronger restrictions on the distribution shifts, or otherwise OOD generalization is impossible. Furthermore, even with appropriate restrictions on distribution shifts in place, we show that the invariance principle alone is insufficient. We prove that a form of the information bottleneck constraint along with invariance helps address the key failures when invariant features capture all the information about the label and also retains the existing success when they do not. We propose an approach that incorporates both of these principles and demonstrate its effectiveness in several experiments.
[ Virtual ]
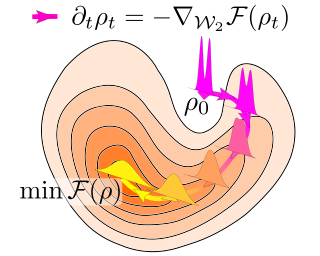
Wasserstein gradient flows provide a powerful means of understanding and solving many diffusion equations. Specifically, Fokker-Planck equations, which model the diffusion of probability measures, can be understood as gradient descent over entropy functionals in Wasserstein space. This equivalence, introduced by Jordan, Kinderlehrer and Otto, inspired the so-called JKO scheme to approximate these diffusion processes via an implicit discretization of the gradient flow in Wasserstein space. Solving the optimization problem associated with each JKO step, however, presents serious computational challenges. We introduce a scalable method to approximate Wasserstein gradient flows, targeted to machine learning applications. Our approach relies on input-convex neural networks (ICNNs) to discretize the JKO steps, which can be optimized by stochastic gradient descent. Contrarily to previous work, our method does not require domain discretization or particle simulation. As a result, we can sample from the measure at each time step of the diffusion and compute its probability density. We demonstrate the performance of our algorithm by computing diffusions following the Fokker-Planck equation and apply it to unnormalized density sampling as well as nonlinear filtering.
[ Virtual ]
We propose a fast algorithm for the probabilistic solution of boundary value problems (BVPs), which are ordinary differential equations subject to boundary conditions. In contrast to previous work, we introduce a Gauss-Markov prior and tailor it specifically to BVPs, which allows computing a posterior distribution over the solution in linear time, at a quality and cost comparable to that of well-established, non-probabilistic methods. Our model further delivers uncertainty quantification, mesh refinement, and hyperparameter adaptation. We demonstrate how these practical considerations positively impact the efficiency of the scheme. Altogether, this results in a practically usable probabilistic BVP solver that is (in contrast to non-probabilistic algorithms) natively compatible with other parts of the statistical modelling tool-chain.
[ Virtual ]
[ Virtual ]
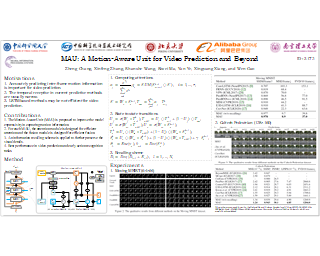
Accurately predicting inter-frame motion information plays a key role in video prediction tasks. In this paper, we propose a Motion-Aware Unit (MAU) to capture reliable inter-frame motion information by broadening the temporal receptive field of the predictive units. The MAU consists of two modules, the attention module and the fusion module. The attention module aims to learn an attention map based on the correlations between the current spatial state and the historical spatial states. Based on the learned attention map, the historical temporal states are aggregated to an augmented motion information (AMI). In this way, the predictive unit can perceive more temporal dynamics from a wider receptive field. Then, the fusion module is utilized to further aggregate the augmented motion information (AMI) and current appearance information (current spatial state) to the final predicted frame. The computation load of MAU is relatively low and the proposed unit can be easily applied to other predictive models. Moreover, an information recalling scheme is employed into the encoders and decoders to help preserve the visual details of the predictions. We evaluate the MAU on both video prediction and early action recognition tasks. Experimental results show that the MAU outperforms the state-of-the-art methods on both …
[ Virtual ]
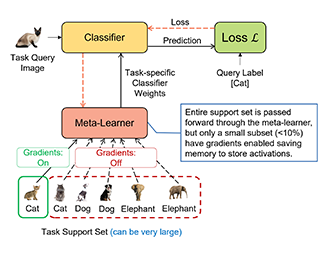
Meta learning approaches to few-shot classification are computationally efficient at test time, requiring just a few optimization steps or single forward pass to learn a new task, but they remain highly memory-intensive to train. This limitation arises because a task's entire support set, which can contain up to 1000 images, must be processed before an optimization step can be taken. Harnessing the performance gains offered by large images thus requires either parallelizing the meta-learner across multiple GPUs, which may not be available, or trade-offs between task and image size when memory constraints apply. We improve on both options by proposing LITE, a general and memory efficient episodic training scheme that enables meta-training on large tasks composed of large images on a single GPU. We achieve this by observing that the gradients for a task can be decomposed into a sum of gradients over the task's training images. This enables us to perform a forward pass on a task's entire training set but realize significant memory savings by back-propagating only a random subset of these images which we show is an unbiased approximation of the full gradient. We use LITE to train meta-learners and demonstrate new state-of-the-art accuracy on the real-world …
[ Virtual ]
[ Virtual ]

Recent history has seen a tremendous growth of work exploring implicit representations of geometry and radiance, popularized through Neural Radiance Fields (NeRF). Such works are fundamentally based on a (implicit) {\em volumetric} representation of occupancy, allowing them to model diverse scene structure including translucent objects and atmospheric obscurants. But because the vast majority of real-world scenes are composed of well-defined surfaces, we introduce a {\em surface} analog of such implicit models called Neural Reflectance Surfaces (NeRS). NeRS learns a neural shape representation of a closed surface that is diffeomorphic to a sphere, guaranteeing water-tight reconstructions. Even more importantly, surface parameterizations allow NeRS to learn (neural) bidirectional surface reflectance functions (BRDFs) that factorize view-dependent appearance into environmental illumination, diffuse color (albedo), and specular “shininess.” Finally, rather than illustrating our results on synthetic scenes or controlled in-the-lab capture, we assemble a novel dataset of multi-view images from online marketplaces for selling goods. Such “in-the-wild” multi-view image sets pose a number of challenges, including a small number of views with unknown/rough camera estimates. We demonstrate that surface-based neural reconstructions enable learning from such data, outperforming volumetric neural rendering-based reconstructions. We hope that NeRS serves as a first step toward building scalable, high-quality libraries …
[ Virtual ]
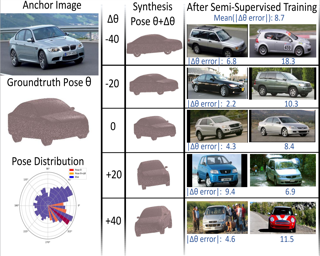
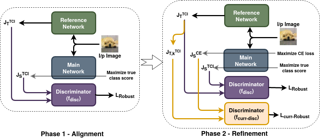
We study the problem of learning to estimate the 3D object pose from a few labelled examples and a collection of unlabelled data. Our main contribution is a learning framework, neural view synthesis and matching, that can transfer the 3D pose annotation from the labelled to unlabelled images reliably, despite unseen 3D views and nuisance variations such as the object shape, texture, illumination or scene context. In our approach, objects are represented as 3D cuboid meshes composed of feature vectors at each mesh vertex. The model is initialized from a few labelled images and is subsequently used to synthesize feature representations of unseen 3D views. The synthesized views are matched with the feature representations of unlabelled images to generate pseudo-labels of the 3D pose. The pseudo-labelled data is, in turn, used to train the feature extractor such that the features at each mesh vertex are more invariant across varying 3D views of the object. Our model is trained in an EM-type manner alternating between increasing the 3D pose invariance of the feature extractor and annotating unlabelled data through neural view synthesis and matching. We demonstrate the effectiveness of the proposed semi-supervised learning framework for 3D pose estimation on the PASCAL3D+ …
[ Virtual ]
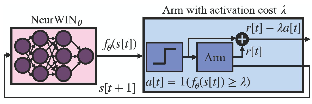
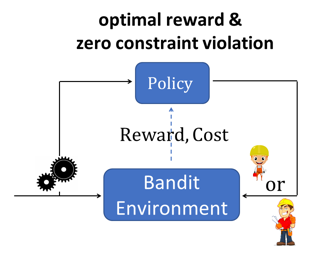
Whittle index policy is a powerful tool to obtain asymptotically optimal solutions for the notoriously intractable problem of restless bandits. However, finding the Whittle indices remains a difficult problem for many practical restless bandits with convoluted transition kernels. This paper proposes NeurWIN, a neural Whittle index network that seeks to learn the Whittle indices for any restless bandits by leveraging mathematical properties of the Whittle indices. We show that a neural network that produces the Whittle index is also one that produces the optimal control for a set of Markov decision problems. This property motivates using deep reinforcement learning for the training of NeurWIN. We demonstrate the utility of NeurWIN by evaluating its performance for three recently studied restless bandit problems.Our experiment results show that the performance of NeurWIN is significantly better than other RL algorithms.
[ Virtual ]
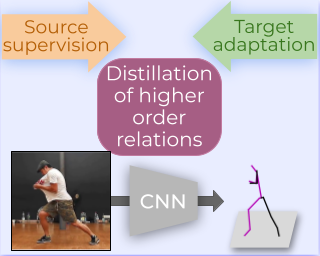
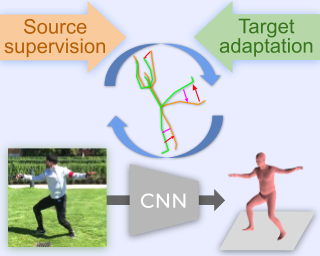
Available 3D human pose estimation approaches leverage different forms of strong (2D/3D pose) or weak (multi-view or depth) paired supervision. Barring synthetic or in-studio domains, acquiring such supervision for each new target environment is highly inconvenient. To this end, we cast 3D pose learning as a self-supervised adaptation problem that aims to transfer the task knowledge from a labeled source domain to a completely unpaired target. We propose to infer image-to-pose via two explicit mappings viz. image-to-latent and latent-to-pose where the latter is a pre-learned decoder obtained from a prior-enforcing generative adversarial auto-encoder. Next, we introduce relation distillation as a means to align the unpaired cross-modal samples i.e., the unpaired target videos and unpaired 3D pose sequences. To this end, we propose a new set of non-local relations in order to characterize long-range latent pose interactions, unlike general contrastive relations where positive couplings are limited to a local neighborhood structure. Further, we provide an objective way to quantify non-localness in order to select the most effective relation set. We evaluate different self-adaptation settings and demonstrate state-of-the-art 3D human pose estimation performance on standard benchmarks.
[ Virtual ]
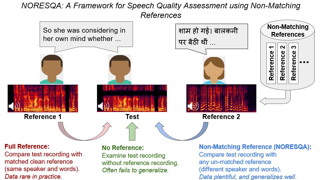
The perceptual task of speech quality assessment (SQA) is a challenging task for machines to do. Objective SQA methods that rely on the availability of the corresponding clean reference have been the primary go-to approaches for SQA. Clearly, these methods fail in real-world scenarios where the ground truth clean references are not available. In recent years, non-intrusive methods that train neural networks to predict ratings or scores have attracted much attention, but they suffer from several shortcomings such as lack of robustness, reliance on labeled data for training and so on. In this work, we propose a new direction for speech quality assessment. Inspired by human's innate ability to compare and assess the quality of speech signals even when they have non-matching contents, we propose a novel framework that predicts a subjective relative quality score for the given speech signal with respect to any provided reference without using any subjective data. We show that neural networks trained using our framework produce scores that correlate well with subjective mean opinion scores (MOS) and are also competitive to methods such as DNSMOS, which explicitly relies on MOS from humans for training networks. Moreover, our method also provides a natural way to embed …
[ Virtual ]
Graph Convolutional Networks (GCNs) are known to suffer from performance degradation as the number of layers increases, which is usually attributed to over-smoothing. Despite the apparent consensus, we observe that there exists a discrepancy between the theoretical understanding of over-smoothing and the practical capabilities of GCNs. Specifically, we argue that over-smoothing does not necessarily happen in practice, a deeper model is provably expressive, can converge to global optimum with linear convergence rate, and achieve very high training accuracy as long as properly trained. Despite being capable of achieving high training accuracy, empirical results show that the deeper models generalize poorly on the testing stage and existing theoretical understanding of such behavior remains elusive. To achieve better understanding, we carefully analyze the generalization capability of GCNs, and show that the training strategies to achieve high training accuracy significantly deteriorate the generalization capability of GCNs. Motivated by these findings, we propose a decoupled structure for GCNs that detaches weight matrices from feature propagation to preserve the expressive power and ensure good generalization performance. We conduct empirical evaluations on various synthetic and real-world datasets to validate the correctness of our theory.
[ Virtual ]
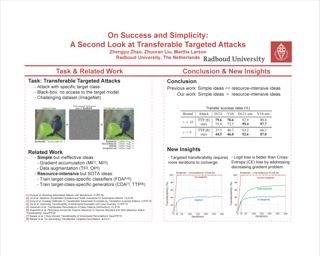
Achieving transferability of targeted attacks is reputed to be remarkably difficult. The current state of the art has resorted to resource-intensive solutions that necessitate training model(s) for each target class with additional data. In our investigation, we find, however, that simple transferable attacks which require neither model training nor additional data can achieve surprisingly strong targeted transferability. This insight has been overlooked until now, mainly because the widespread practice of attacking with only few iterations has largely limited the attack convergence to optimal targeted transferability. In particular, we, for the first time, identify that a very simple logit loss can largely surpass the commonly adopted cross-entropy loss, and yield even better results than the resource-intensive state of the art. Our analysis spans a variety of transfer scenarios, especially including three new, realistic scenarios: an ensemble transfer scenario with little model similarity, a worse-case scenario with low-ranked target classes, and also a real-world attack on the Google Cloud Vision API. Results in these new transfer scenarios demonstrate that the commonly adopted, easy scenarios cannot fully reveal the actual strength of different attacks and may cause misleading comparative results. We also show the usefulness of the simple logit loss for generating targeted …
[ Virtual ]
[ Virtual ]
Can we use machine learning to compress graph data? The absence of ordering in graphs poses a significant challenge to conventional compression algorithms, limiting their attainable gains as well as their ability to discover relevant patterns. On the other hand, most graph compression approaches rely on domain-dependent handcrafted representations and cannot adapt to different underlying graph distributions. This work aims to establish the necessary principles a lossless graph compression method should follow to approach the entropy storage lower bound. Instead of making rigid assumptions about the graph distribution, we formulate the compressor as a probabilistic model that can be learned from data and generalise to unseen instances. Our “Partition and Code” framework entails three steps: first, a partitioning algorithm decomposes the graph into subgraphs, then these are mapped to the elements of a small dictionary on which we learn a probability distribution, and finally, an entropy encoder translates the representation into bits. All the components (partitioning, dictionary and distribution) are parametric and can be trained with gradient descent. We theoretically compare the compression quality of several graph encodings and prove, under mild conditions, that PnC achieves compression gains that grow either linearly or quadratically with the number of vertices. Empirically, …
[ Virtual ]
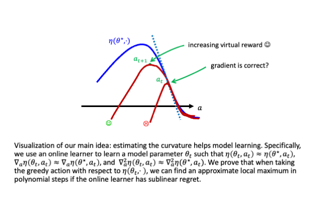
This paper studies model-based bandit and reinforcement learning (RL) with nonlinear function approximations. We propose to study convergence to approximate local maxima because we show that global convergence is statistically intractable even for one-layer neural net bandit with a deterministic reward. For both nonlinear bandit and RL, the paper presents a model-based algorithm, Virtual Ascent with Online Model Learner (ViOlin), which provably converges to a local maximum with sample complexity that only depends on the sequential Rademacher complexity of the model class. Our results imply novel global or local regret bounds on several concrete settings such as linear bandit with finite or sparse model class, and two-layer neural net bandit. A key algorithmic insight is that optimism may lead to over-exploration even for two-layer neural net model class. On the other hand, for convergence to local maxima, it suffices to maximize the virtual return if the model can also reasonably predict the gradient and Hessian of the real return.
[ Virtual ]
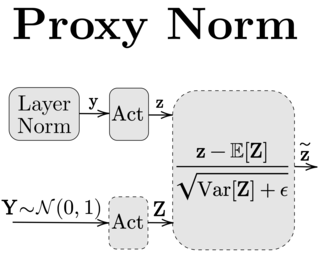
We investigate the reasons for the performance degradation incurred with batch-independent normalization. We find that the prototypical techniques of layer normalization and instance normalization both induce the appearance of failure modes in the neural network's pre-activations: (i) layer normalization induces a collapse towards channel-wise constant functions; (ii) instance normalization induces a lack of variability in instance statistics, symptomatic of an alteration of the expressivity. To alleviate failure mode (i) without aggravating failure mode (ii), we introduce the technique "Proxy Normalization" that normalizes post-activations using a proxy distribution. When combined with layer normalization or group normalization, this batch-independent normalization emulates batch normalization's behavior and consistently matches or exceeds its performance.
[ Virtual ]
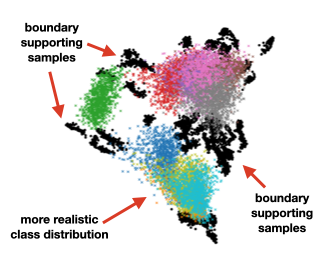
Model quantization is known as a promising method to compress deep neural networks, especially for inferences on lightweight mobile or edge devices. However, model quantization usually requires access to the original training data to maintain the accuracy of the full-precision models, which is often infeasible in real-world scenarios for security and privacy issues.A popular approach to perform quantization without access to the original data is to use synthetically generated samples, based on batch-normalization statistics or adversarial learning.However, the drawback of such approaches is that they primarily rely on random noise input to the generator to attain diversity of the synthetic samples. We find that this is often insufficient to capture the distribution of the original data, especially around the decision boundaries.To this end, we propose Qimera, a method that uses superposed latent embeddings to generate synthetic boundary supporting samples.For the superposed embeddings to better reflect the original distribution, we also propose using an additional disentanglement mapping layer and extracting information from the full-precision model.The experimental results show that Qimera achieves state-of-the-art performances for various settings on data-free quantization. Code is available at https://github.com/iamkanghyunchoi/qimera.
[ Virtual ]
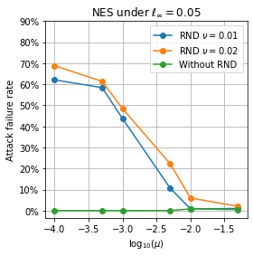
The query-based black-box attacks have raised serious threats to machine learning models in many real applications. In this work, we study a lightweight defense method, dubbed Random Noise Defense (RND), which adds proper Gaussian noise to each query. We conduct the theoretical analysis about the effectiveness of RND against query-based black-box attacks and the corresponding adaptive attacks. Our theoretical results reveal that the defense performance of RND is determined by the magnitude ratio between the noise induced by RND and the noise added by the attackers for gradient estimation or local search. The large magnitude ratio leads to the stronger defense performance of RND, and it's also critical for mitigating adaptive attacks. Based on our analysis, we further propose to combine RND with a plausible Gaussian augmentation Fine-tuning (RND-GF). It enables RND to add larger noise to each query while maintaining the clean accuracy to obtain a better trade-off between clean accuracy and defense performance. Additionally, RND can be flexibly combined with the existing defense methods to further boost the adversarial robustness, such as adversarial training (AT). Extensive experiments on CIFAR-10 and ImageNet verify our theoretical findings and the effectiveness of RND and RND-GF.
[ Virtual ]
[ Virtual ]
Graph embedding maps a graph into a convenient vector-space representation for graph analysis and machine learning applications. Many graph embedding methods hinge on a sampling of context nodes based on random walks. However, random walks can be a biased sampler due to the structural properties of graphs. Most notably, random walks are biased by the degree of each node, where a node is sampled proportionally to its degree. The implication of such biases has not been clear, particularly in the context of graph representation learning. Here, we investigate the impact of the random walks' bias on graph embedding and propose residual2vec, a general graph embedding method that can debias various structural biases in graphs by using random graphs. We demonstrate that this debiasing not only improves link prediction and clustering performance but also allows us to explicitly model salient structural properties in graph embedding.
[ Virtual ]
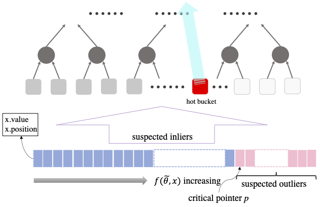
[ Virtual ]
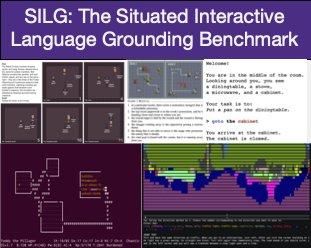
Existing work in language grounding typically study single environments. How do we build unified models that apply across multiple environments? We propose the multi-environment Symbolic Interactive Language Grounding benchmark (SILG), which unifies a collection of diverse grounded language learning environments under a common interface. SILG consists of grid-world environments that require generalization to new dynamics, entities, and partially observed worlds (RTFM, Messenger, NetHack), as well as symbolic counterparts of visual worlds that re- quire interpreting rich natural language with respect to complex scenes (ALFWorld, Touchdown). Together, these environments provide diverse grounding challenges in richness of observation space, action space, language specification, and plan com- plexity. In addition, we propose the first shared model architecture for RL on these environments, and evaluate recent advances such as egocentric local convolution, recurrent state-tracking, entity-centric attention, and pretrained LM using SILG. Our shared architecture achieves comparable performance to environment-specific architectures. Moreover, we find that many recent modelling advances do not result in significant gains on environments other than the one they were designed for. This highlights the need for a multi-environment benchmark. Finally, the best models significantly underperform humans on SILG, which suggests ample room for future work. We hope SILG enables the community …
[ Virtual ]
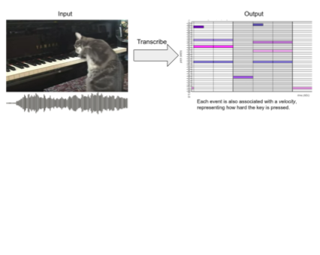
Piano transcription systems are typically optimized to estimate pitch activity at each frame of audio. They are often followed by carefully designed heuristics and post-processing algorithms to estimate note events from the frame-level predictions. Recent methods have also framed piano transcription as a multi-task learning problem, where the activation of different stages of a note event are estimated independently. These practices are not well aligned with the desired outcome of the task, which is the specification of note intervals as holistic events, rather than the aggregation of disjoint observations. In this work, we propose a novel formulation of piano transcription, which is optimized to directly predict note events. Our method is based on Semi-Markov Conditional Random Fields (semi-CRF), which produce scores for intervals rather than individual frames. When formulating piano transcription in this way, we eliminate the need to rely on disjoint frame-level estimates for different stages of a note event. We conduct experiments on the MAESTRO dataset and demonstrate that the proposed model surpasses the current state-of-the-art for piano transcription. Our results suggest that the semi-CRF output layer, while still quadratic in complexity, is a simple, fast and well-performing solution for event-based prediction, and may lead to similar success …
[ Virtual ]
[ Virtual ]

Importance Sampling (IS) is a widely used building block for a large variety of off-policy estimation and learning algorithms. However, empirical and theoretical studies have progressively shown that vanilla IS leads to poor estimations whenever the behavioral and target policies are too dissimilar. In this paper, we analyze the theoretical properties of the IS estimator by deriving a novel anticoncentration bound that formalizes the intuition behind its undesired behavior. Then, we propose a new class of IS transformations, based on the notion of power mean. To the best of our knowledge, the resulting estimator is the first to achieve, under certain conditions, two key properties: (i) it displays a subgaussian concentration rate; (ii) it preserves the differentiability in the target distribution. Finally, we provide numerical simulations on both synthetic examples and contextual bandits, in comparison with off-policy evaluation and learning baselines.
[ Virtual ]
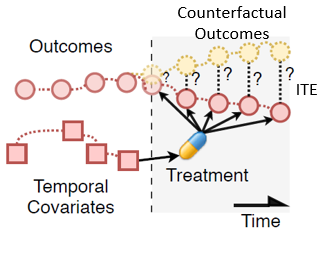
Most of the medical observational studies estimate the causal treatment effects using electronic health records (EHR), where a patient's covariates and outcomes are both observed longitudinally. However, previous methods focus only on adjusting for the covariates while neglecting the temporal structure in the outcomes. To bridge the gap, this paper develops a new method, SyncTwin, that learns a patient-specific time-constant representation from the pre-treatment observations. SyncTwin issues counterfactual prediction of a target patient by constructing a synthetic twin that closely matches the target in representation. The reliability of the estimated treatment effect can be assessed by comparing the observed and synthetic pre-treatment outcomes. The medical experts can interpret the estimate by examining the most important contributing individuals to the synthetic twin. In the real-data experiment, SyncTwin successfully reproduced the findings of a randomized controlled clinical trial using observational data, which demonstrates its usability in the complex real-world EHR.
[ Virtual ]
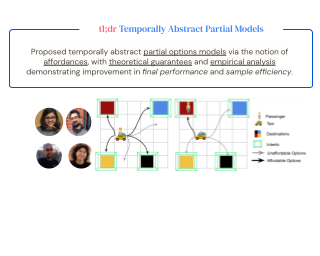
Humans and animals have the ability to reason and make predictions about different courses of action at many time scales. In reinforcement learning, option models (Sutton, Precup \& Singh, 1999; Precup, 2000) provide the framework for this kind of temporally abstract prediction and reasoning. Natural intelligent agents are also able to focus their attention on courses of action that are relevant or feasible in a given situation, sometimes termed affordable actions. In this paper, we define a notion of affordances for options, and develop temporally abstract partial option models, that take into account the fact that an option might be affordable only in certain situations. We analyze the trade-offs between estimation and approximation error in planning and learning when using such models, and identify some interesting special cases. Additionally, we empirically demonstrate the ability to learn both affordances and partial option models online resulting in improved sample efficiency and planning time in the Taxi domain.
[ Virtual ]
This paper presents a new algorithm for domain generalization (DG), \textit{test-time template adjuster (T3A)}, aiming to robustify a model to unknown distribution shift. Unlike existing methods that focus on \textit{training phase}, our method focuses \textit{test phase}, i.e., correcting its prediction by itself during test time. Specifically, T3A adjusts a trained linear classifier (the last layer of deep neural networks) with the following procedure: (1) compute a pseudo-prototype representation for each class using online unlabeled data augmented by the base classifier trained in the source domains, (2) and then classify each sample based on its distance to the pseudo-prototypes. T3A is back-propagation-free and modifies only the linear layer; therefore, the increase in computational cost during inference is negligible and avoids the catastrophic failure might caused by stochastic optimization. Despite its simplicity, T3A can leverage knowledge about the target domain by using off-the-shelf test-time data and improve performance. We tested our method on four domain generalization benchmarks, namely PACS, VLCS, OfficeHome, and TerraIncognita, along with various backbone networks including ResNet18, ResNet50, Big Transfer (BiT), Vision Transformers (ViT), and MLP-Mixer. The results show T3A stably improves performance on unseen domains across choices of backbone networks, and outperforms existing domain generalization methods.
[ Virtual ]
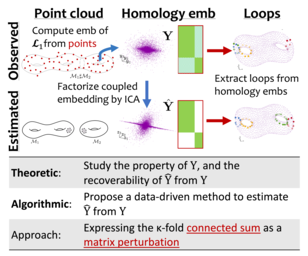
[ Virtual ]
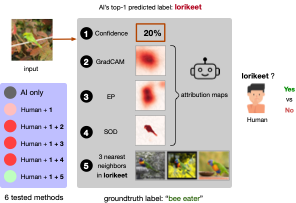
Explaining the decisions of an Artificial Intelligence (AI) model is increasingly critical in many real-world, high-stake applications.Hundreds of papers have either proposed new feature attribution methods, discussed or harnessed these tools in their work.However, despite humans being the target end-users, most attribution methods were only evaluated on proxy automatic-evaluation metrics (Zhang et al. 2018; Zhou et al. 2016; Petsiuk et al. 2018). In this paper, we conduct the first user study to measure attribution map effectiveness in assisting humans in ImageNet classification and Stanford Dogs fine-grained classification, and when an image is natural or adversarial (i.e., contains adversarial perturbations). Overall, feature attribution is surprisingly not more effective than showing humans nearest training-set examples. On a harder task of fine-grained dog categorization, presenting attribution maps to humans does not help, but instead hurts the performance of human-AI teams compared to AI alone. Importantly, we found automatic attribution-map evaluation measures to correlate poorly with the actual human-AI team performance. Our findings encourage the community to rigorously test their methods on the downstream human-in-the-loop applications and to rethink the existing evaluation metrics.
[ Virtual ]
It has been hypothesized that quantum computers may lend themselves well to applications in machine learning. In the present work, we analyze function classes defined via quantum kernels. Quantum computers offer the possibility to efficiently compute inner products of exponentially large density operators that are classically hard to compute. However, having an exponentially large feature space renders the problem of generalization hard. Furthermore, being able to evaluate inner products in high dimensional spaces efficiently by itself does not guarantee a quantum advantage, as already classically tractable kernels can correspond to high- or infinite-dimensional reproducing kernel Hilbert spaces (RKHS). We analyze the spectral properties of quantum kernels and find that we can expect an advantage if their RKHS is low dimensional and contains functions that are hard to compute classically. If the target function is known to lie in this class, this implies a quantum advantage, as the quantum computer can encode this inductive bias, whereas there is no classically efficient way to constrain the function class in the same way. However, we show that finding suitable quantum kernels is not easy because the kernel evaluation might require exponentially many measurements. In conclusion, our message is a somewhat sobering one: we …
[ Virtual ]

[ Virtual ]
In several real world applications, machine learning models are deployed to make predictions on data whose distribution changes gradually along time, leading to a drift between the train and test distributions. Such models are often re-trained on new data periodically, and they hence need to generalize to data not too far into the future. In this context, there is much prior work on enhancing temporal generalization, e.g. continuous transportation of past data, kernel smoothed time-sensitive parameters and more recently, adversarial learning of time-invariant features. However, these methods share several limitations, e.g, poor scalability, training instability, and dependence on unlabeled data from the future. Responding to the above limitations, we propose a simple method that starts with a model with time-sensitive parameters but regularizes its temporal complexity using a Gradient Interpolation (GI) loss. GI allows the decision boundary to change along time and can still prevent overfitting to the limited training time snapshots by allowing task-specific control over changes along time. We compare our method to existing baselines on multiple real-world datasets, which show that GI outperforms more complicated generative and adversarial approaches on the one hand, and simpler gradient regularization methods on the other.
[ Virtual ]
Unsupervised domain adaptation (UDA) enables cross-domain learning without target domain labels by transferring knowledge from a labeled source domain whose distribution differs from that of the target. However, UDA is not always successful and several accounts of `negative transfer' have been reported in the literature. In this work, we prove a simple lower bound on the target domain error that complements the existing upper bound. Our bound shows the insufficiency of minimizing source domain error and marginal distribution mismatch for a guaranteed reduction in the target domain error, due to the possible increase of induced labeling function mismatch. This insufficiency is further illustrated through simple distributions for which the same UDA approach succeeds, fails, and may succeed or fail with an equal chance. Motivated from this, we propose novel data poisoning attacks to fool UDA methods into learning representations that produce large target domain errors. We evaluate the effect of these attacks on popular UDA methods using benchmark datasets where they have been previously shown to be successful. Our results show that poisoning can significantly decrease the target domain accuracy, dropping it to almost 0% in some cases, with the addition of only 10% poisoned data in the source domain. …
[ Virtual ]
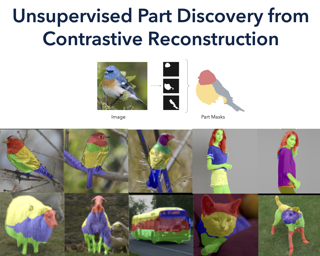
The goal of self-supervised visual representation learning is to learn strong, transferable image representations, with the majority of research focusing on object or scene level. On the other hand, representation learning at part level has received significantly less attention. In this paper, we propose an unsupervised approach to object part discovery and segmentation and make three contributions. First, we construct a proxy task through a set of objectives that encourages the model to learn a meaningful decomposition of the image into its parts. Secondly, prior work argues for reconstructing or clustering pre-computed features as a proxy to parts; we show empirically that this alone is unlikely to find meaningful parts; mainly because of their low resolution and the tendency of classification networks to spatially smear out information. We suggest that image reconstruction at the level of pixels can alleviate this problem, acting as a complementary cue. Lastly, we show that the standard evaluation based on keypoint regression does not correlate well with segmentation quality and thus introduce different metrics, NMI and ARI, that better characterize the decomposition of objects into parts. Our method yields semantic parts which are consistent across fine-grained but visually distinct categories, outperforming the state of the …
[ Virtual ]
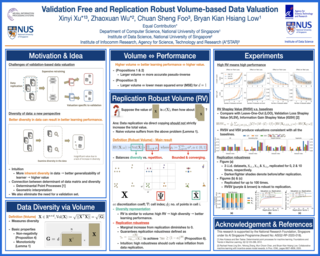
Data valuation arises as a non-trivial challenge in real-world use cases such as collaborative machine learning, federated learning, trusted data sharing, data marketplaces. The value of data is often associated with the learning performance (e.g., validation accuracy) of a model trained on the data, which introduces a close coupling between data valuation and validation. However, a validation set may notbe available in practice and it can be challenging for the data providers to reach an agreement on the choice of the validation set. Another practical issue is that of data replication: Given the value of some data points, a dishonest data provider may replicate these data points to exploit the valuation for a larger reward/payment. We observe that the diversity of the data points is an inherent property of a dataset that is independent of validation. We formalize diversity via the volume of the data matrix (i.e., determinant of its left Gram), which allows us to establish a formal connection between the diversity of data and learning performance without requiring validation. Furthermore, we propose a robust volume measure with a theoretical guarantee on the replication robustness by following the intuition that copying the same data points does not increase the …
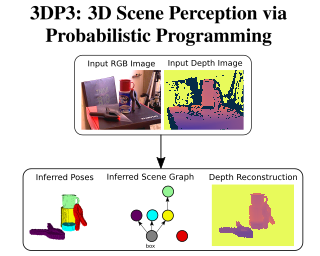
We present 3DP3, a framework for inverse graphics that uses inference in a structured generative model of objects, scenes, and images. 3DP3 uses (i) voxel models to represent the 3D shape of objects, (ii) hierarchical scene graphs to decompose scenes into objects and the contacts between them, and (iii) depth image likelihoods based on real-time graphics. Given an observed RGB-D image, 3DP3's inference algorithm infers the underlying latent 3D scene, including the object poses and a parsimonious joint parametrization of these poses, using fast bottom-up pose proposals, novel involutive MCMC updates of the scene graph structure, and, optionally, neural object detectors and pose estimators. We show that 3DP3 enables scene understanding that is aware of 3D shape, occlusion, and contact structure. Our results demonstrate that 3DP3 is more accurate at 6DoF object pose estimation from real images than deep learning baselines and shows better generalization to challenging scenes with novel viewpoints, contact, and partial observability.
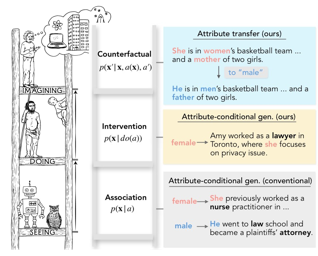
Controllable text generation concerns two fundamental tasks of wide applications, namely generating text of given attributes (i.e., attribute-conditional generation), and minimally editing existing text to possess desired attributes (i.e., text attribute transfer). Extensive prior work has largely studied the two problems separately, and developed different conditional models which, however, are prone to producing biased text (e.g., various gender stereotypes). This paper proposes to formulate controllable text generation from a principled causal perspective which models the two tasks with a unified framework. A direct advantage of the causal formulation is the use of rich causality tools to mitigate generation biases and improve control. We treat the two tasks as interventional and counterfactual causal inference based on a structural causal model, respectively. We then apply the framework to the challenging practical setting where confounding factors (that induce spurious correlations) are observable only on a small fraction of data. Experiments show significant superiority of the causal approach over previous conditional models for improved control accuracy and reduced bias.
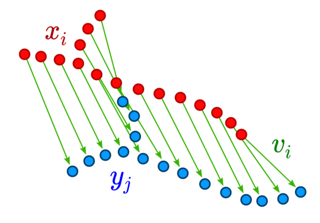
This work investigates the use of robust optimal transport (OT) for shape matching. Specifically, we show that recent OT solvers improve both optimization-based and deep learning methods for point cloud registration, boosting accuracy at an affordable computational cost. This manuscript starts with a practical overview of modern OT theory. We then provide solutions to the main difficulties in using this framework for shape matching. Finally, we showcase the performance of transport-enhanced registration models on a wide range of challenging tasks: rigid registration for partial shapes; scene flow estimation on the Kitti dataset; and nonparametric registration of lung vascular trees between inspiration and expiration. Our OT-based methods achieve state-of-the-art results on Kitti and for the challenging lung registration task, both in terms of accuracy and scalability. We also release PVT1010, a new public dataset of 1,010 pairs of lung vascular trees with densely sampled points. This dataset provides a challenging use case for point cloud registration algorithms with highly complex shapes and deformations. Our work demonstrates that robust OT enables fast pre-alignment and fine-tuning for a wide range of registration models, thereby providing a new key method for the computer vision toolbox. Our code and dataset are available online at: https://github.com/uncbiag/robot.
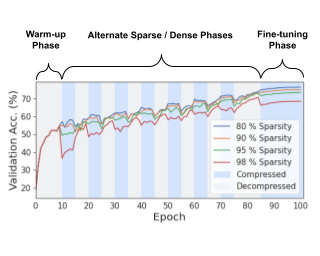
The increasing computational requirements of deep neural networks (DNNs) have led to significant interest in obtaining DNN models that are sparse, yet accurate. Recent work has investigated the even harder case of sparse training, where the DNN weights are, for as much as possible, already sparse to reduce computational costs during training. Existing sparse training methods are often empirical and can have lower accuracy relative to the dense baseline. In this paper, we present a general approach called Alternating Compressed/DeCompressed (AC/DC) training of DNNs, demonstrate convergence for a variant of the algorithm, and show that AC/DC outperforms existing sparse training methods in accuracy at similar computational budgets; at high sparsity levels, AC/DC even outperforms existing methods that rely on accurate pre-trained dense models. An important property of AC/DC is that it allows co-training of dense and sparse models, yielding accurate sparse-dense model pairs at the end of the training process. This is useful in practice, where compressed variants may be desirable for deployment in resource-constrained settings without re-doing the entire training flow, and also provides us with insights into the accuracy gap between dense and compressed models.

Continual learning (CL) learns a sequence of tasks incrementally with the goal of achieving two main objectives: overcoming catastrophic forgetting (CF) and encouraging knowledge transfer (KT) across tasks. However, most existing techniques focus only on overcoming CF and have no mechanism to encourage KT, and thus do not do well in KT. Although several papers have tried to deal with both CF and KT, our experiments show that they suffer from serious CF when the tasks do not have much shared knowledge. Another observation is that most current CL methods do not use pre-trained models, but it has been shown that such models can significantly improve the end task performance. For example, in natural language processing, fine-tuning a BERT-like pre-trained language model is one of the most effective approaches. However, for CL, this approach suffers from serious CF. An interesting question is how to make the best use of pre-trained models for CL. This paper proposes a novel model called CTR to solve these problems. Our experimental results demonstrate the effectiveness of CTR

For many applications in image analysis, learning models that are invariant to translations and rotations is paramount. This is the case, for example, in medical imaging where the objects of interest can appear at arbitrary positions, with arbitrary orientations. As of today, Convolutional Neural Networks (CNN) are one of the most powerful tools for image analysis. They achieve, thanks to convolutions, an invariance with respect to translations. In this work, we present a new type of convolutional layer that takes advantage of Bessel functions, well known in physics, to build Bessel-CNNs (B-CNNs) that are invariant to all the continuous set of possible rotation angles by design.
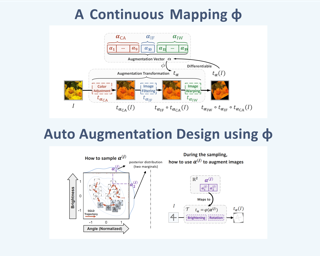
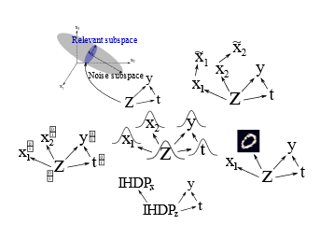
Using deep latent variable models in causal inference has attracted considerable interest recently, but an essential open question is their ability to yield consistent causal estimates. While they have demonstrated promising results and theory exists on some simple model formulations, we also know that causal effects are not even identifiable in general with latent variables. We investigate this gap between theory and empirical results with analytical considerations and extensive experiments under multiple synthetic and real-world data sets, using the causal effect variational autoencoder (CEVAE) as a case study. While CEVAE seems to work reliably under some simple scenarios, it does not estimate the causal effect correctly with a misspecified latent variable or a complex data distribution, as opposed to its original motivation. Hence, our results show that more attention should be paid to ensuring the correctness of causal estimates with deep latent variable models.
Identifying the common structure of neural dynamics across subjects is key for extracting unifying principles of brain computation and for many brain machine interface applications. Here, we propose a novel probabilistic approach for aligning stimulus-evoked responses from multiple animals in a common low dimensional manifold and use hierarchical inference to identify which stimulus drives neural activity in any given trial. Our probabilistic decoder is robust to a range of features of the neural responses and significantly outperforms existing neural alignment procedures. When applied to recordings from the mouse olfactory bulb, our approach reveals low-dimensional population dynamics that are odor specific and have consistent structure across animals. Thus, our decoder can be used for increasing the robustness and scalability of neural-based chemical detection.
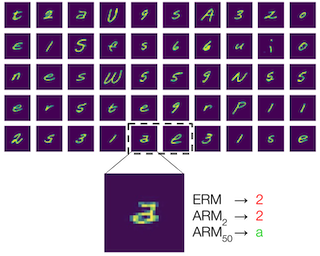
A fundamental assumption of most machine learning algorithms is that the training and test data are drawn from the same underlying distribution. However, this assumption is violated in almost all practical applications: machine learning systems are regularly tested under distribution shift, due to changing temporal correlations, atypical end users, or other factors. In this work, we consider the problem setting of domain generalization, where the training data are structured into domains and there may be multiple test time shifts, corresponding to new domains or domain distributions. Most prior methods aim to learn a single robust model or invariant feature space that performs well on all domains. In contrast, we aim to learn models that adapt at test time to domain shift using unlabeled test points. Our primary contribution is to introduce the framework of adaptive risk minimization (ARM), in which models are directly optimized for effective adaptation to shift by learning to adapt on the training domains. Compared to prior methods for robustness, invariance, and adaptation, ARM methods provide performance gains of 1-4% test accuracy on a number of image classification problems exhibiting domain shift.
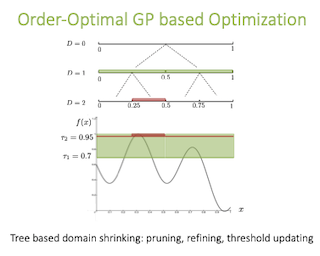
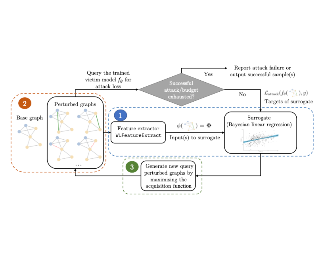
Graph neural networks, a popular class of models effective in a wide range of graph-based learning tasks, have been shown to be vulnerable to adversarial attacks. While the majority of the literature focuses on such vulnerability in node-level classification tasks, little effort has been dedicated to analysing adversarial attacks on graph-level classification, an important problem with numerous real-life applications such as biochemistry and social network analysis. The few existing methods often require unrealistic setups, such as access to internal information of the victim models, or an impractically-large number of queries. We present a novel Bayesian optimisation-based attack method for graph classification models. Our method is black-box, query-efficient and parsimonious with respect to the perturbation applied. We empirically validate the effectiveness and flexibility of the proposed method on a wide range of graph classification tasks involving varying graph properties, constraints and modes of attack. Finally, we analyse common interpretable patterns behind the adversarial samples produced, which may shed further light on the adversarial robustness of graph classification models.
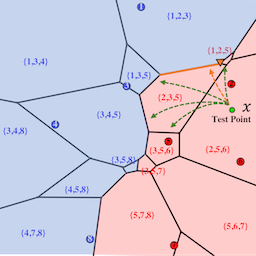

The adversarial machine learning literature is largely partitioned into evasion attacks on testing data and poisoning attacks on training data. In this work, we show that adversarial examples, originally intended for attacking pre-trained models, are even more effective for data poisoning than recent methods designed specifically for poisoning. In fact, adversarial examples with labels re-assigned by the crafting network remain effective for training, suggesting that adversarial examples contain useful semantic content, just with the "wrong" labels (according to a network, but not a human). Our method, adversarial poisoning, is substantially more effective than existing poisoning methods for secure dataset release, and we release a poisoned version of ImageNet, ImageNet-P, to encourage research into the strength of this form of data obfuscation.
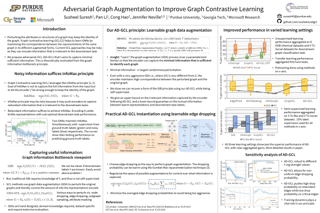
Self-supervised learning of graph neural networks (GNN) is in great need because of the widespread label scarcity issue in real-world graph/network data. Graph contrastive learning (GCL), by training GNNs to maximize the correspondence between the representations of the same graph in its different augmented forms, may yield robust and transferable GNNs even without using labels. However, GNNs trained by traditional GCL often risk capturing redundant graph features and thus may be brittle and provide sub-par performance in downstream tasks. Here, we propose a novel principle, termed adversarial-GCL (\textit{AD-GCL}), which enables GNNs to avoid capturing redundant information during the training by optimizing adversarial graph augmentation strategies used in GCL. We pair AD-GCL with theoretical explanations and design a practical instantiation based on trainable edge-dropping graph augmentation. We experimentally validate AD-GCL by comparing with the state-of-the-art GCL methods and achieve performance gains of up-to~14\% in unsupervised, ~6\% in transfer and~3\% in semi-supervised learning settings overall with 18 different benchmark datasets for the tasks of molecule property regression and classification, and social network classification.

3D point cloud data is increasingly used in safety-critical applications such as autonomous driving. Thus, the robustness of 3D deep learning models against adversarial attacks becomes a major consideration. In this paper, we systematically study the impact of various self-supervised learning proxy tasks on different architectures and threat models for 3D point clouds with adversarial training. Specifically, we study MLP-based (PointNet), convolution-based (DGCNN), and transformer-based (PCT) 3D architectures. Through extensive experimentation, we demonstrate that appropriate applications of self-supervision can significantly enhance the robustness in 3D point cloud recognition, achieving considerable improvements compared to the standard adversarial training baseline. Our analysis reveals that local feature learning is desirable for adversarial robustness in point clouds since it limits the adversarial propagation between the point-level input perturbations and the model's final output. This insight also explains the success of DGCNN and the jigsaw proxy task in achieving stronger 3D adversarial robustness.
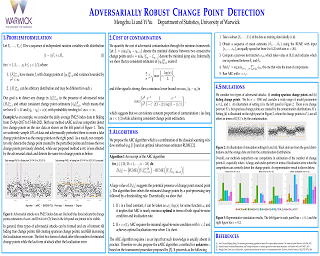

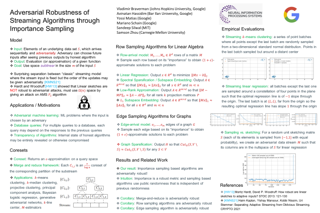

Robustness of machine learning models is critical for security related applications, where real-world adversaries are uniquely focused on evading neural network based detectors. Prior work mainly focus on crafting adversarial examples (AEs) with small uniform norm-bounded perturbations across features to maintain the requirement of imperceptibility. However, uniform perturbations do not result in realistic AEs in domains such as malware, finance, and social networks. For these types of applications, features typically have some semantically meaningful dependencies. The key idea of our proposed approach is to enable non-uniform perturbations that can adequately represent these feature dependencies during adversarial training. We propose using characteristics of the empirical data distribution, both on correlations between the features and the importance of the features themselves. Using experimental datasets for malware classification, credit risk prediction, and spam detection, we show that our approach is more robust to real-world attacks. Finally, we present robustness certification utilizing non-uniform perturbation bounds, and show that non-uniform bounds achieve better certification.
Despite strong performance in numerous applications, the fragility of deep learning to input perturbations has raised serious questions about its use in safety-critical domains. While adversarial training can mitigate this issue in practice, state-of-the-art methods are increasingly application-dependent, heuristic in nature, and suffer from fundamental trade-offs between nominal performance and robustness. Moreover, the problem of finding worst-case perturbations is non-convex and underparameterized, both of which engender a non-favorable optimization landscape. Thus, there is a gap between the theory and practice of robust learning, particularly with respect to when and why adversarial training works. In this paper, we take a constrained learning approach to address these questions and to provide a theoretical foundation for robust learning. In particular, we leverage semi-infinite optimization and non-convex duality theory to show that adversarial training is equivalent to a statistical problem over perturbation distributions. Notably, we show that a myriad of previous robust training techniques can be recovered for particular, sub-optimal choices of these distributions. Using these insights, we then propose a hybrid Langevin Markov Chain Monte Carlo approach for which several common algorithms (e.g., PGD) are special cases. Finally, we show that our approach can mitigate the trade-off between nominal and robust performance, yielding …
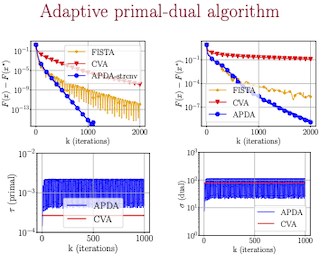
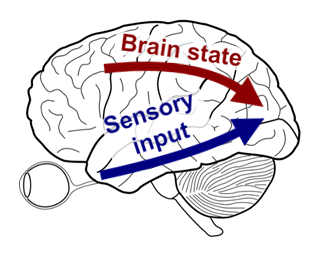
We present a joint deep neural system identification model for two major sources of neural variability: stimulus-driven and stimulus-conditioned fluctuations. To this end, we combine (1) state-of-the-art deep networks for stimulus-driven activity and (2) a flexible, normalizing flow-based generative model to capture the stimulus-conditioned variability including noise correlations. This allows us to train the model end-to-end without the need for sophisticated probabilistic approximations associated with many latent state models for stimulus-conditioned fluctuations. We train the model on the responses of thousands of neurons from multiple areas of the mouse visual cortex to natural images. We show that our model outperforms previous state-of-the-art models in predicting the distribution of neural population responses to novel stimuli, including shared stimulus-conditioned variability. Furthermore, it successfully learns known latent factors of the population responses that are related to behavioral variables such as pupil dilation, and other factors that vary systematically with brain area or retinotopic location. Overall, our model accurately accounts for two critical sources of neural variability while avoiding several complexities associated with many existing latent state models. It thus provides a useful tool for uncovering the interplay between different factors that contribute to variability in neural activity.
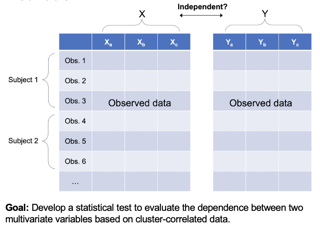
The Hilbert-Schmidt Independence Criterion (HSIC) is a powerful kernel-based statistic for assessing the generalized dependence between two multivariate variables. However, independence testing based on the HSIC is not directly possible for cluster-correlated data. Such a correlation pattern among the observations arises in many practical situations, e.g., family-based and longitudinal data, and requires proper accommodation. Therefore, we propose a novel HSIC-based independence test to evaluate the dependence between two multivariate variables based on cluster-correlated data. Using the previously proposed empirical HSIC as our test statistic, we derive its asymptotic distribution under the null hypothesis of independence between the two variables but in the presence of sample correlation. Based on both simulation studies and real data analysis, we show that, with clustered data, our approach effectively controls type I error and has a higher statistical power than competing methods.
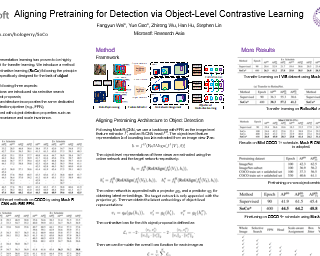
Image-level contrastive representation learning has proven to be highly effective as a generic model for transfer learning. Such generality for transfer learning, however, sacrifices specificity if we are interested in a certain downstream task. We argue that this could be sub-optimal and thus advocate a design principle which encourages alignment between the self-supervised pretext task and the downstream task. In this paper, we follow this principle with a pretraining method specifically designed for the task of object detection. We attain alignment in the following three aspects: 1) object-level representations are introduced via selective search bounding boxes as object proposals; 2) the pretraining network architecture incorporates the same dedicated modules used in the detection pipeline (e.g. FPN); 3) the pretraining is equipped with object detection properties such as object-level translation invariance and scale invariance. Our method, called Selective Object COntrastive learning (SoCo), achieves state-of-the-art results for transfer performance on COCO detection using a Mask R-CNN framework. Code is available at https://github.com/hologerry/SoCo.
Adversarial examples for neural network image classifiers are known to be transferable: examples optimized to be misclassified by a source classifier are often misclassified as well by classifiers with different architectures. However, targeted adversarial examples—optimized to be classified as a chosen target class—tend to be less transferable between architectures. While prior research on constructing transferable targeted attacks has focused on improving the optimization procedure, in this work we examine the role of the source classifier. Here, we show that training the source classifier to be "slightly robust"—that is, robust to small-magnitude adversarial examples—substantially improves the transferability of class-targeted and representation-targeted adversarial attacks, even between architectures as different as convolutional neural networks and transformers. The results we present provide insight into the nature of adversarial examples as well as the mechanisms underlying so-called "robust" classifiers.
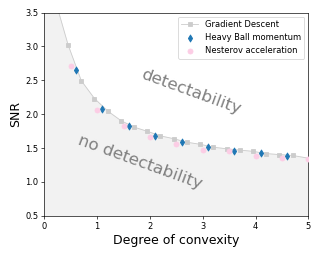
The optimization step in many machine learning problems rarely relies on vanilla gradient descent but it is common practice to use momentum-based accelerated methods. Despite these algorithms being widely applied to arbitrary loss functions, their behaviour in generically non-convex, high dimensional landscapes is poorly understood.In this work, we use dynamical mean field theory techniques to describe analytically the average dynamics of these methods in a prototypical non-convex model: the (spiked) matrix-tensor model. We derive a closed set of equations that describe the behaviour of heavy-ball momentum and Nesterov acceleration in the infinite dimensional limit. By numerical integration of these equations, we observe that these methods speed up the dynamics but do not improve the algorithmic threshold with respect to gradient descent in the spiked model.
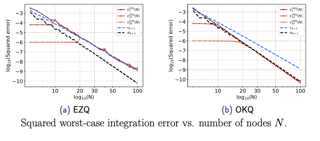
We study a quadrature, proposed by Ermakov and Zolotukhin in the sixties, through the lens of kernel methods. The nodes of this quadrature rule follow the distribution of a determinantal point process, while the weights are defined through a linear system, similarly to the optimal kernel quadrature. In this work, we show how these two classes of quadrature are related, and we prove a tractable formula of the expected value of the squared worst-case integration error on the unit ball of an RKHS of the former quadrature. In particular, this formula involves the eigenvalues of the corresponding kernel and leads to improving on the existing theoretical guarantees of the optimal kernel quadrature with determinantal point processes.
Recent work demonstrates that deep neural networks trained using Empirical Risk Minimization (ERM) can generalize under distribution shift, outperforming specialized training algorithms for domain generalization. The goal of this paper is to further understand this phenomenon. In particular, we study the extent to which the seminal domain adaptation theory of Ben-David et al. (2007) explains the performance of ERMs. Perhaps surprisingly, we find that this theory does not provide a tight explanation of the out-of-domain generalization observed across a large number of ERM models trained on three popular domain generalization datasets. This motivates us to investigate other possible measures—that, however, lack theory—which could explain generalization in this setting. Our investigation reveals that measures relating to the Fisher information, predictive entropy, and maximum mean discrepancy are good predictors of the out-of-distribution generalization of ERM models. We hope that our work helps galvanize the community towards building a better understanding of when deep networks trained with ERM generalize out-of-distribution.
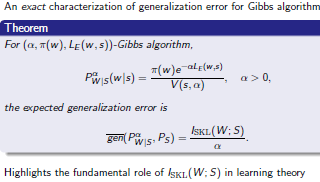
Various approaches have been developed to upper bound the generalization error of a supervised learning algorithm. However, existing bounds are often loose and lack of guarantees. As a result, they may fail to characterize the exact generalization ability of a learning algorithm.Our main contribution is an exact characterization of the expected generalization error of the well-known Gibbs algorithm (a.k.a. Gibbs posterior) using symmetrized KL information between the input training samples and the output hypothesis. Our result can be applied to tighten existing expected generalization error and PAC-Bayesian bounds. Our approach is versatile, as it also characterizes the generalization error of the Gibbs algorithm with data-dependent regularizer and that of the Gibbs algorithm in the asymptotic regime, where it converges to the empirical risk minimization algorithm. Of particular relevance, our results highlight the role the symmetrized KL information plays in controlling the generalization error of the Gibbs algorithm.
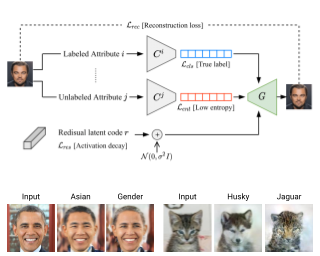
Unsupervised disentanglement has been shown to be theoretically impossible without inductive biases on the models and the data. As an alternative approach, recent methods rely on limited supervision to disentangle the factors of variation and allow their identifiability. While annotating the true generative factors is only required for a limited number of observations, we argue that it is infeasible to enumerate all the factors of variation that describe a real-world image distribution. To this end, we propose a method for disentangling a set of factors which are only partially labeled, as well as separating the complementary set of residual factors that are never explicitly specified. Our success in this challenging setting, demonstrated on synthetic benchmarks, gives rise to leveraging off-the-shelf image descriptors to partially annotate a subset of attributes in real image domains (e.g. of human faces) with minimal manual effort. Specifically, we use a recent language-image embedding model (CLIP) to annotate a set of attributes of interest in a zero-shot manner and demonstrate state-of-the-art disentangled image manipulation results.
In recent years there has been significant effort to adapt the key tools and ideas in convex optimization to the Riemannian setting. One key challenge has remained: Is there a Nesterov-like accelerated gradient method for geodesically convex functions on a Riemannian manifold? Recent work has given partial answers and the hope was that this ought to be possible. Here we prove that in a noisy setting, there is no analogue of accelerated gradient descent for geodesically convex functions on the hyperbolic plane. Our results apply even when the noise is exponentially small. The key intuition behind our proof is short and simple: In negatively curved spaces, the volume of a ball grows so fast that information about the past gradients is not useful in the future.
In this paper, we propose a practical online method for solving a class of distributional robust optimization (DRO) with non-convex objectives, which has important applications in machine learning for improving the robustness of neural networks. In the literature, most methods for solving DRO are based on stochastic primal-dual methods. However, primal-dual methods for DRO suffer from several drawbacks: (1) manipulating a high-dimensional dual variable corresponding to the size of data is time expensive; (2) they are not friendly to online learning where data is coming sequentially. To address these issues, we consider a class of DRO with an KL divergence regularization on the dual variables, transform the min-max problem into a compositional minimization problem, and propose practical duality-free online stochastic methods without requiring a large mini-batch size. We establish the state-of-the-art complexities of the proposed methods with and without a Polyak-Łojasiewicz (PL) condition of the objective. Empirical studies on large-scale deep learning tasks (i) demonstrate that our method can speed up the training by more than 2 times than baseline methods and save days of training time on a large-scale dataset with ∼ 265K images, and (ii) verify the supreme performance of DRO over Empirical Risk Minimization (ERM) on imbalanced …
The standard tools of causal inference have been developed to answer simple causal queries which can be easily formalized as a small number of statistical estimands in the context of a particular structural causal model (SCM); however, scientific theories often make diffuse predictions about a large number of causal variables. This article proposes a framework for parameterizing such complex causal queries as the maximum difference in causal effects associated with two sets of causal variables that have a researcher specified probability of occurring. We term this estimand the Maximum Causal Set Effect (MCSE) and develop an estimator for it that is asymptotically consistent and conservative in finite samples under assumptions that are standard in the causal inference literature. This estimator is also asymptotically normal and amenable to the non-parametric bootstrap, facilitating classical statistical inference about this novel estimand. We compare this estimator to more common latent variable approaches and find that it can uncover larger causal effects in both real world and simulated data.
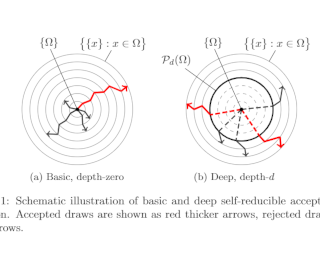
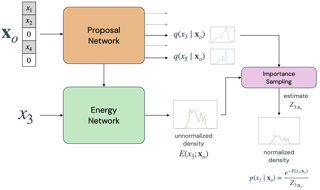
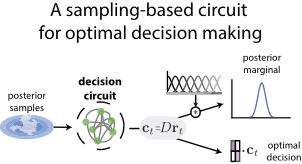
Many features of human and animal behavior can be understood in the framework of Bayesian inference and optimal decision making, but the biological substrate of such processes is not fully understood. Neural sampling provides a flexible code for probabilistic inference in high dimensions and explains key features of sensory responses under experimental manipulations of uncertainty. However, since it encodes uncertainty implicitly, across time and neurons, it remains unclear how such representations can be used for decision making. Here we propose a spiking network model that maps neural samples of a task-specific marginal distribution into an instantaneous representation of uncertainty via a procedure inspired by online kernel density estimation, so that its output can be readily used for decision making. Our model is consistent with experimental results at the level of single neurons and populations, and makes predictions for how neural responses and decisions could be modulated by uncertainty and prior biases. More generally, our work brings together conflicting perspectives on probabilistic brain computation.
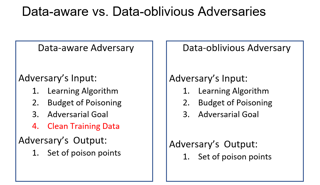
Poisoning attacks have emerged as a significant security threat to machine learning algorithms. It has been demonstrated that adversaries who make small changes to the training set, such as adding specially crafted data points, can hurt the performance of the output model. Most of these attacks require the full knowledge of training data. This leaves open the possibility of achieving the same attack results using poisoning attacks that do not have the full knowledge of the clean training set.In this work, we initiate a theoretical study of the problem above. Specifically, for the case of feature selection with LASSO, we show that \emph{full information} adversaries (that craft poisoning examples based on the rest of the training data) are provably much more devastating compared to the optimal attacker that is \emph{oblivious} to the training set yet has access to the distribution of the data. Our separation result shows that the two settings of data-aware and data-oblivious are fundamentally different and we cannot hope to achieve the same attack or defense results in these scenarios.
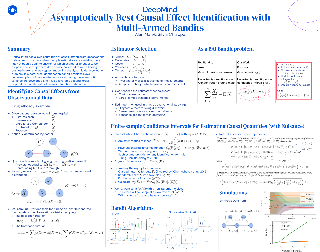
This paper considers the problem of selecting a formula for identifying a causal quantity of interest among a set of available formulas. We assume an online setting in which the investigator may alter the data collection mechanism in a data-dependent way with the aim of identifying the formula with lowest asymptotic variance in as few samples as possible. We formalize this setting by using the best-arm-identification bandit framework where the standard goal of learning the arm with the lowest loss is replaced with the goal of learning the arm that will produce the best estimate. We introduce new tools for constructing finite-sample confidence bounds on estimates of the asymptotic variance that account for the estimation of potentially complex nuisance functions, and adapt the best-arm-identification algorithms of LUCB and Successive Elimination to use these bounds. We validate our method by providing upper bounds on the sample complexity and an empirical study on artificially generated data.
The lower the distortion of an estimator, the more the distribution of its outputs generally deviates from the distribution of the signals it attempts to estimate. This phenomenon, known as the perception-distortion tradeoff, has captured significant attention in image restoration, where it implies that fidelity to ground truth images comes on the expense of perceptual quality (deviation from statistics of natural images). However, despite the increasing popularity of performing comparisons on the perception-distortion plane, there remains an important open question: what is the minimal distortion that can be achieved under a given perception constraint? In this paper, we derive a closed form expression for this distortion-perception (DP) function for the mean squared-error (MSE) distortion and Wasserstein-2 perception index. We prove that the DP function is always quadratic, regardless of the underlying distribution. This stems from the fact that estimators on the DP curve form a geodesic in Wasserstein space. In the Gaussian setting, we further provide a closed form expression for such estimators. For general distributions, we show how these estimators can be constructed from the estimators at the two extremes of the tradeoff: The global MSE minimizer, and a minimizer of the MSE under a perfect perceptual quality constraint. …
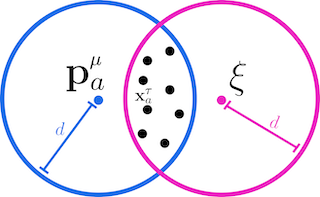
While Attention has come to be an important mechanism in deep learning, there remains limited intuition for why it works so well. Here, we show that Transformer Attention can be closely related under certain data conditions to Kanerva's Sparse Distributed Memory (SDM), a biologically plausible associative memory model. We confirm that these conditions are satisfied in pre-trained GPT2 Transformer models. We discuss the implications of the Attention-SDM map and provide new computational and biological interpretations of Attention.
Humans perceive the world by concurrently processing and fusing high-dimensional inputs from multiple modalities such as vision and audio. Machine perception models, in stark contrast, are typically modality-specific and optimised for unimodal benchmarks.A common approach for building multimodal models is to simply combine multiple of these modality-specific architectures using late-stage fusion of final representations or predictions ('late-fusion').Instead, we introduce a novel transformer based architecture that uses 'attention bottlenecks' for modality fusion at multiple layers. Compared to traditional pairwise self-attention, these bottlenecks force information between different modalities to pass through a small number of '`bottleneck' latent units, requiring the model to collate and condense the most relevant information in each modality and only share what is necessary. We find that such a strategy improves fusion performance, at the same time reducing computational cost. We conduct thorough ablation studies, and achieve state-of-the-art results on multiple audio-visual classification benchmarks including Audioset, Epic-Kitchens and VGGSound. All code and models will be released.
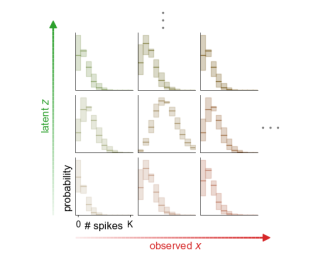
Neural responses are variable: even under identical experimental conditions, single neuron and population responses typically differ from trial to trial and across time. Recent work has demonstrated that this variability has predictable structure, can be modulated by sensory input and behaviour, and bears critical signatures of the underlying network dynamics and computations. However, current methods for characterising neural variability are primarily geared towards sensory coding in the laboratory: they require trials with repeatable experimental stimuli and behavioural covariates. In addition, they make strong assumptions about the parametric form of variability, rely on assumption-free but data-inefficient histogram-based approaches, or are altogether ill-suited for capturing variability modulation by covariates. Here we present a universal probabilistic spike count model that eliminates these shortcomings. Our method builds on sparse Gaussian processes and can model arbitrary spike count distributions (SCDs) with flexible dependence on observed as well as latent covariates, using scalable variational inference to jointly infer the covariate-to-SCD mappings and latent trajectories in a data efficient way. Without requiring repeatable trials, it can flexibly capture covariate-dependent joint SCDs, and provide interpretable latent causes underlying the statistical dependencies between neurons. We apply the model to recordings from a canonical non-sensory neural population: head direction cells …
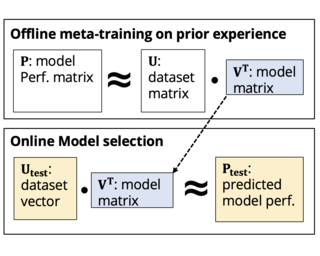
Given an unsupervised outlier detection task on a new dataset, how can we automatically select a good outlier detection algorithm and its hyperparameter(s) (collectively called a model)? In this work, we tackle the unsupervised outlier model selection (UOMS) problem, and propose MetaOD, a principled, data-driven approach to UOMS based on meta-learning. The UOMS problem is notoriously challenging, as compared to model selection for classification and clustering, since (i) model evaluation is infeasible due to the lack of hold-out data with labels, and (ii) model comparison is infeasible due to the lack of a universal objective function. MetaOD capitalizes on the performances of a large body of detection models on historical outlier detection benchmark datasets, and carries over this prior experience to automatically select an effective model to be employed on a new dataset without any labels, model evaluations or model comparisons. To capture task similarity within our meta-learning framework, we introduce specialized meta-features that quantify outlying characteristics of a dataset. Extensive experiments show that selecting a model by MetaOD significantly outperforms no model selection (e.g. always using the same popular model or the ensemble of many) as well as other meta-learning techniques that we tailored for UOMS. Moreover upon (meta-)training, …
Reinforcement learning (RL) promises to enable autonomous acquisition of complex behaviors for diverse agents. However, the success of current reinforcement learning algorithms is predicated on an often under-emphasised requirement -- each trial needs to start from a fixed initial state distribution. Unfortunately, resetting the environment to its initial state after each trial requires substantial amount of human supervision and extensive instrumentation of the environment which defeats the goal of autonomous acquisition of complex behaviors. In this work, we propose Value-accelerated Persistent Reinforcement Learning (VaPRL), which generates a curriculum of initial states such that the agent can bootstrap on the success of easier tasks to efficiently learn harder tasks. The agent also learns to reach the initial states proposed by the curriculum, minimizing the reliance on human interventions into the learning. We observe that VaPRL reduces the interventions required by three orders of magnitude compared to episodic RL while outperforming prior state-of-the art methods for reset-free RL both in terms of sample efficiency and asymptotic performance on a variety of simulated robotics problems.
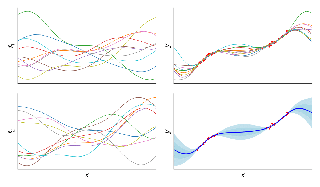
Recent work introduced deep kernel processes as an entirely kernel-based alternative to NNs (Aitchison et al. 2020). Deep kernel processes flexibly learn good top-layer representations by alternately sampling the kernel from a distribution over positive semi-definite matrices and performing nonlinear transformations. A particular deep kernel process, the deep Wishart process (DWP), is of particular interest because its prior can be made equivalent to deep Gaussian process (DGP) priors for kernels that can be expressed entirely in terms of Gram matrices. However, inference in DWPs has not yet been possible due to the lack of sufficiently flexible distributions over positive semi-definite matrices. Here, we give a novel approach to obtaining flexible distributions over positive semi-definite matrices by generalising the Bartlett decomposition of the Wishart probability density. We use this new distribution to develop an approximate posterior for the DWP that includes dependency across layers. We develop a doubly-stochastic inducing-point inference scheme for the DWP and show experimentally that inference in the DWP can improve performance over doing inference in a DGP with the equivalent prior.
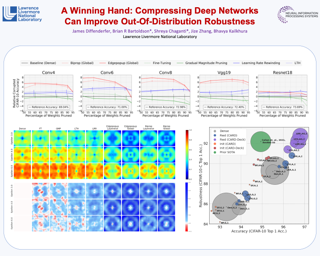
Successful adoption of deep learning (DL) in the wild requires models to be: (1) compact, (2) accurate, and (3) robust to distributional shifts. Unfortunately, efforts towards simultaneously meeting these requirements have mostly been unsuccessful. This raises an important question: Is the inability to create Compact, Accurate, and Robust Deep neural networks (CARDs) fundamental? To answer this question, we perform a large-scale analysis of popular model compression techniques which uncovers several intriguing patterns. Notably, in contrast to traditional pruning approaches (e.g., fine tuning and gradual magnitude pruning), we find that ``lottery ticket-style'' approaches can surprisingly be used to produce CARDs, including binary-weight CARDs. Specifically, we are able to create extremely compact CARDs that, compared to their larger counterparts, have similar test accuracy and matching (or better) robustness---simply by pruning and (optionally) quantizing. Leveraging the compactness of CARDs, we develop a simple domain-adaptive test-time ensembling approach (CARD-Decks) that uses a gating module to dynamically select appropriate CARDs from the CARD-Deck based on their spectral-similarity with test samples. The proposed approach builds a "winning hand'' of CARDs that establishes a new state-of-the-art (on RobustBench) on CIFAR-10-C accuracies (i.e., 96.8% standard and 92.75% robust) and CIFAR-100-C accuracies (80.6% standard and 71.3% robust) with better …
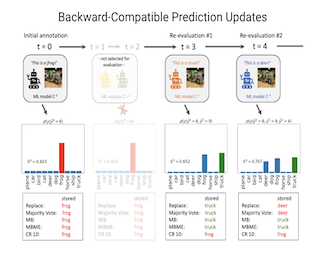
When machine learning systems meet real world applications, accuracy is only one of several requirements. In this paper, we assay a complementary perspective originating from the increasing availability of pre-trained and regularly improving state-of-the-art models. While new improved models develop at a fast pace, downstream tasks vary more slowly or stay constant. Assume that we have a large unlabelled data set for which we want to maintain accurate predictions. Whenever a new and presumably better ML models becomes available, we encounter two problems: (i) given a limited budget, which data points should be re-evaluated using the new model?; and (ii) if the new predictions differ from the current ones, should we update? Problem (i) is about compute cost, which matters for very large data sets and models. Problem (ii) is about maintaining consistency of the predictions, which can be highly relevant for downstream applications; our demand is to avoid negative flips, i.e., changing correct to incorrect predictions. In this paper, we formalize the Prediction Update Problem and present an efficient probabilistic approach as answer to the above questions. In extensive experiments on standard classification benchmark data sets, we show that our method outperforms alternative strategies along key metrics for backward-compatible …

Many industrial and security applications employ a suite of sensors for detecting abrupt changes in temporal behavior patterns. These abrupt changes typically manifest locally, rendering only a small subset of sensors informative. Continuous monitoring of every sensor can be expensive due to resource constraints, and serves as a motivation for the bandit quickest changepoint detection problem, where sensing actions (or sensors) are sequentially chosen, and only measurements corresponding to chosen actions are observed. We derive an information-theoretic lower bound on the detection delay for a general class of finitely parameterized probability distributions. We then propose a computationally efficient online sensing scheme, which seamlessly balances the need for exploration of different sensing options with exploitation of querying informative actions. We derive expected delay bounds for the proposed scheme and show that these bounds match our information-theoretic lower bounds at low false alarm rates, establishing optimality of the proposed method. We then perform a number of experiments on synthetic and real datasets demonstrating the effectiveness of our proposed method.
Bandits with Knapsacks (BwK) is a general model for multi-armed bandits under supply/budget constraints. While worst-case regret bounds for BwK are well-understood, we present three results that go beyond the worst-case perspective. First, we provide upper and lower bounds which amount to a full characterization for logarithmic, instance-dependent regret rates.Second, we consider "simple regret" in BwK, which tracks algorithm's performance in a given round, and prove that it is small in all but a few rounds. Third, we provide a "generalreduction" from BwK to bandits which takes advantage of some known helpful structure, and apply this reduction to combinatorial semi-bandits, linear contextual bandits, and multinomial-logit bandits. Our results build on the BwK algorithm from prior work, providing new analyses thereof.
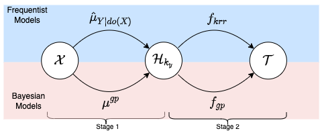
While causal models are becoming one of the mainstays of machine learning, the problem of uncertainty quantification in causal inference remains challenging. In this paper, we study the causal data fusion problem, where data arising from multiple causal graphs are combined to estimate the average treatment effect of a target variable. As data arises from multiple sources and can vary in quality and sample size, principled uncertainty quantification becomes essential. To that end, we introduce \emph{Bayesian Causal Mean Processes}, the framework which combines ideas from probabilistic integration and kernel mean embeddings to represent interventional distributions in the reproducing kernel Hilbert space, while taking into account the uncertainty within each causal graph. To demonstrate the informativeness of our uncertainty estimation, we apply our method to the Causal Bayesian Optimisation task and show improvements over state-of-the-art methods.
A structural equation model (SEM) is an effective framework to reason over causal relationships represented via a directed acyclic graph (DAG).Recent advances have enabled effective maximum-likelihood point estimation of DAGs from observational data. However, a point estimate may not accurately capture the uncertainty in inferring the underlying graph in practical scenarios, wherein the true DAG is non-identifiable and/or the observed dataset is limited.We propose Bayesian Causal Discovery Nets (BCD Nets), a variational inference framework for estimating a distribution over DAGs characterizing a linear-Gaussian SEM.Developing a full Bayesian posterior over DAGs is challenging due to the the discrete and combinatorial nature of graphs.We analyse key design choices for scalable VI over DAGs, such as 1) the parametrization of DAGs via an expressive variational family, 2) a continuous relaxation that enables low-variance stochastic optimization, and 3) suitable priors over the latent variables.We provide a series of experiments on real and synthetic data showing that BCD Nets outperform maximum-likelihood methods on standard causal discovery metrics such as structural Hamming distance in low data regimes.
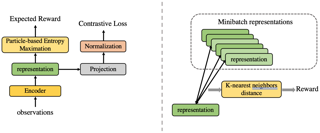
We introduce a new unsupervised pre-training method for reinforcement learning called APT, which stands for Active Pre-Training. APT learns behaviors and representations by actively searching for novel states in reward-free environments. The key novel idea is to explore the environment by maximizing a non-parametric entropy computed in an abstract representation space, which avoids challenging density modeling and consequently allows our approach to scale much better in environments that have high-dimensional observations (e.g., image observations). We empirically evaluate APT by exposing task-specific reward after a long unsupervised pre-training phase. In Atari games, APT achieves human-level performance on 12 games and obtains highly competitive performance compared to canonical fully supervised RL algorithms. On DMControl suite, APT beats all baselines in terms of asymptotic performance and data efficiency and dramatically improves performance on tasks that are extremely difficult to train from scratch.
Simulated DAG models may exhibit properties that, perhaps inadvertently, render their structure identifiable and unexpectedly affect structure learning algorithms. Here, we show that marginal variance tends to increase along the causal order for generically sampled additive noise models. We introduce varsortability as a measure of the agreement between the order of increasing marginal variance and the causal order. For commonly sampled graphs and model parameters, we show that the remarkable performance of some continuous structure learning algorithms can be explained by high varsortability and matched by a simple baseline method. Yet, this performance may not transfer to real-world data where varsortability may be moderate or dependent on the choice of measurement scales. On standardized data, the same algorithms fail to identify the ground-truth DAG or its Markov equivalence class. While standardization removes the pattern in marginal variance, we show that data generating processes that incur high varsortability also leave a distinct covariance pattern that may be exploited even after standardization. Our findings challenge the significance of generic benchmarks with independently drawn parameters. The code is available at https://github.com/Scriddie/Varsortability.
The theory of spectral filtering is a remarkable tool to understand the statistical properties of learning with kernels. For least squares, it allows to derive various regularization schemes that yield faster convergence rates of the excess risk than with Tikhonov regularization. This is typically achieved by leveraging classical assumptions called source and capacity conditions, which characterize the difficulty of the learning task. In order to understand estimators derived from other loss functions, Marteau-Ferey et al. have extended the theory of Tikhonov regularization to generalized self concordant loss functions (GSC), which contain, e.g., the logistic loss. In this paper, we go a step further and show that fast and optimal rates can be achieved for GSC by using the iterated Tikhonov regularization scheme, which is intrinsically related to the proximal point method in optimization, and overcomes the limitation of the classical Tikhonov regularization.
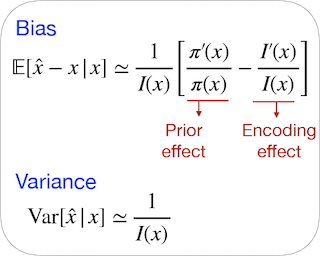
Perception, in theoretical neuroscience, has been modeled as the encoding of external stimuli into internal signals, which are then decoded. The Bayesian mean is an important decoder, as it is optimal for purposes of both estimation and discrimination. We present widely-applicable approximations to the bias and to the variance of the Bayesian mean, obtained under the minimal and biologically-relevant assumption that the encoding results from a series of independent, though not necessarily identically-distributed, signals. Simulations substantiate the accuracy of our approximations in the small-noise regime. The bias of the Bayesian mean comprises two components: one driven by the prior, and one driven by the precision of the encoding. If the encoding is 'efficient', the two components have opposite effects; their relative strengths are determined by the objective that the encoding optimizes. The experimental literature on perception reports both 'Bayesian' biases directed towards prior expectations, and opposite, 'anti-Bayesian' biases. We show that different tasks are indeed predicted to yield such contradictory biases, under a consistently-optimal encoding-decoding model. Moreover, we recover Wei and Stocker's "law of human perception", a relation between the bias of the Bayesian mean and the derivative of its variance, and show how the coefficient of proportionality in this …
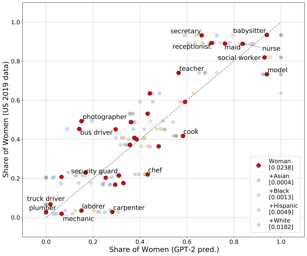
The capabilities of natural language models trained on large-scale data have increased immensely over the past few years. Open source libraries such as HuggingFace have made these models easily available and accessible. While prior research has identified biases in large language models, this paper considers biases contained in the most popular versions of these models when applied `out-of-the-box' for downstream tasks. We focus on generative language models as they are well-suited for extracting biases inherited from training data. Specifically, we conduct an in-depth analysis of GPT-2, which is the most downloaded text generation model on HuggingFace, with over half a million downloads per month. We assess biases related to occupational associations for different protected categories by intersecting gender with religion, sexuality, ethnicity, political affiliation, and continental name origin. Using a template-based data collection pipeline, we collect 396K sentence completions made by GPT-2 and find: (i) The machine-predicted jobs are less diverse and more stereotypical for women than for men, especially for intersections; (ii) Intersectional interactions are highly relevant for occupational associations, which we quantify by fitting 262 logistic models; (iii) For most occupations, GPT-2 reflects the skewed gender and ethnicity distribution found in US Labor Bureau data, and even pulls …
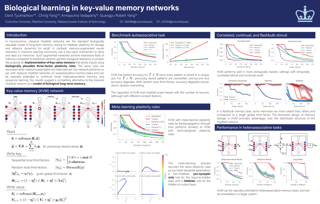
In neuroscience, classical Hopfield networks are the standard biologically plausible model of long-term memory, relying on Hebbian plasticity for storage and attractor dynamics for recall. In contrast, memory-augmented neural networks in machine learning commonly use a key-value mechanism to store and read out memories in a single step. Such augmented networks achieve impressive feats of memory compared to traditional variants, yet their biological relevance is unclear. We propose an implementation of basic key-value memory that stores inputs using a combination of biologically plausible three-factor plasticity rules. The same rules are recovered when network parameters are meta-learned. Our network performs on par with classical Hopfield networks on autoassociative memory tasks and can be naturally extended to continual recall, heteroassociative memory, and sequence learning. Our results suggest a compelling alternative to the classical Hopfield network as a model of biological long-term memory.
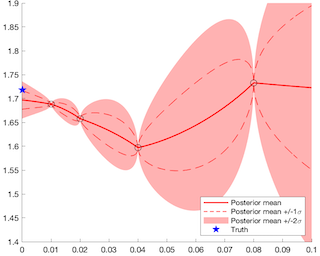
Probabilistic numerics casts numerical tasks, such the numerical solution of differential equations, as inference problems to be solved. One approach is to model the unknown quantity of interest as a random variable, and to constrain this variable using data generated during the course of a traditional numerical method. However, data may be nonlinearly related to the quantity of interest, rendering the proper conditioning of random variables difficult and limiting the range of numerical tasks that can be addressed. Instead, this paper proposes to construct probabilistic numerical methods based only on the final output from a traditional method. A convergent sequence of approximations to the quantity of interest constitute a dataset, from which the limiting quantity of interest can be extrapolated, in a probabilistic analogue of Richardson’s deferred approach to the limit. This black box approach (1) massively expands the range of tasks to which probabilistic numerics can be applied, (2) inherits the features and performance of state-of-the-art numerical methods, and (3) enables provably higher orders of convergence to be achieved. Applications are presented for nonlinear ordinary and partial differential equations, as well as for eigenvalue problems—a setting for which no probabilistic numerical methods have yet been developed.
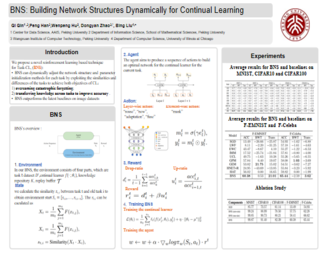
Continual learning (CL) of a sequence of tasks is often accompanied with the catastrophic forgetting(CF) problem. Existing research has achieved remarkable results in overcoming CF, especially for task continual learning. However, limited work has been done to achieve another important goal of CL,knowledge transfer.In this paper, we propose a technique (called BNS) to do both. The novelty of BNS is that it dynamically builds a network to learn each new task to overcome CF and to transfer knowledge across tasks at the same time. Experimental results show that when the tasks are different (with little shared knowledge), BNS can already outperform the state-of-the-art baselines. When the tasks are similar and have shared knowledge, BNS outperforms the baselines substantially by a large margin due to its knowledge transfer capability.
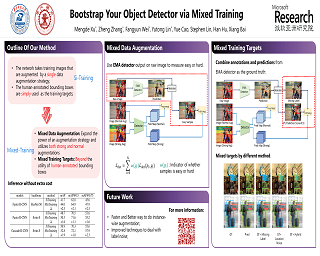
We introduce MixTraining, a new training paradigm for object detection that can improve the performance of existing detectors for free. MixTraining enhances data augmentation by utilizing augmentations of different strengths while excluding the strong augmentations of certain training samples that may be detrimental to training. In addition, it addresses localization noise and missing labels in human annotations by incorporating pseudo boxes that can compensate for these errors. Both of these MixTraining capabilities are made possible through bootstrapping on the detector, which can be used to predict the difficulty of training on a strong augmentation, as well as to generate reliable pseudo boxes thanks to the robustness of neural networks to labeling error. MixTraining is found to bring consistent improvements across various detectors on the COCO dataset. In particular, the performance of Faster R-CNN~\cite{ren2015faster} with a ResNet-50~\cite{he2016deep} backbone is improved from 41.7 mAP to 44.0 mAP, and the accuracy of Cascade-RCNN~\cite{cai2018cascade} with a Swin-Small~\cite{liu2021swin} backbone is raised from 50.9 mAP to 52.8 mAP.
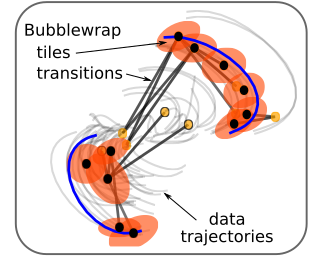
While most classic studies of function in experimental neuroscience have focused on the coding properties of individual neurons, recent developments in recording technologies have resulted in an increasing emphasis on the dynamics of neural populations. This has given rise to a wide variety of models for analyzing population activity in relation to experimental variables, but direct testing of many neural population hypotheses requires intervening in the system based on current neural state, necessitating models capable of inferring neural state online. Existing approaches, primarily based on dynamical systems, require strong parametric assumptions that are easily violated in the noise-dominated regime and do not scale well to the thousands of data channels in modern experiments. To address this problem, we propose a method that combines fast, stable dimensionality reduction with a soft tiling of the resulting neural manifold, allowing dynamics to be approximated as a probability flow between tiles. This method can be fit efficiently using online expectation maximization, scales to tens of thousands of tiles, and outperforms existing methods when dynamics are noise-dominated or feature multi-modal transition probabilities. The resulting model can be trained at kiloHertz data rates, produces accurate approximations of neural dynamics within minutes, and generates predictions on submillisecond …
Neural network robustness has become a central topic in machine learning in recent years. Most training algorithms that improve the model's robustness to adversarial and common corruptions also introduce a large computational overhead, requiring as many as ten times the number of forward and backward passes in order to converge. To combat this inefficiency, we propose BulletTrain, a boundary example mining technique to drastically reduce the computational cost of robust training. Our key observation is that only a small fraction of examples are beneficial for improving robustness. BulletTrain dynamically predicts these important examples and optimizes robust training algorithms to focus on the important examples. We apply our technique to several existing robust training algorithms and achieve a 2.2x speed-up for TRADES and MART on CIFAR-10 and a 1.7x speed-up for AugMix on CIFAR-10-C and CIFAR-100-C without any reduction in clean and robust accuracy.
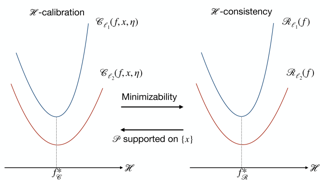
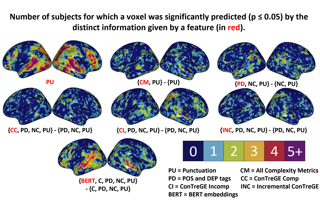
While studying semantics in the brain, neuroscientists use two approaches. One is to identify areas that are correlated with semantic processing load. Another is to find areas that are predicted by the semantic representation of the stimulus words. However, most studies of syntax have focused only on identifying areas correlated with syntactic processing load. One possible reason for this discrepancy is that representing syntactic structure in an embedding space such that it can be used to model brain activity is a non-trivial computational problem. Another possible reason is that it is unclear if the low signal-to-noise ratio of neuroimaging tools such as functional Magnetic Resonance Imaging (fMRI) can allow us to reveal the correlates of complex (and perhaps subtle) syntactic representations. In this study, we propose novel multi-dimensional features that encode information about the syntactic structure of sentences. Using these features and fMRI recordings of participants reading a natural text, we model the brain representation of syntax. First, we find that our syntactic structure-based features explain additional variance in the brain activity of various parts of the language system, even after controlling for complexity metrics that capture processing load. At the same time, we see that regions well-predicted by syntactic …
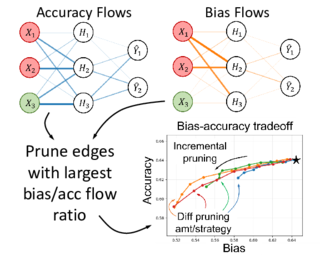
Motivated by neuroscientific and clinical applications, we empirically examine whether observational measures of information flow can suggest interventions. We do so by performing experiments on artificial neural networks in the context of fairness in machine learning, where the goal is to induce fairness in the system through interventions. Using our recently developed M-information flow framework, we measure the flow of information about the true label (responsible for accuracy, and hence desirable), and separately, the flow of information about a protected attribute (responsible for bias, and hence undesirable) on the edges of a trained neural network. We then compare the flow magnitudes against the effect of intervening on those edges by pruning. We show that pruning edges that carry larger information flows about the protected attribute reduces bias at the output to a greater extent. This demonstrates that M-information flow can meaningfully suggest targets for interventions, answering the title's question in the affirmative. We also evaluate bias-accuracy tradeoffs for different intervention strategies, to analyze how one might use estimates of desirable and undesirable information flows (here, accuracy and bias flows) to inform interventions that preserve the former while reducing the latter.
(Non-)robustness of neural networks to small, adversarial pixel-wise perturbations, and as more recently shown, to even random spatial transformations (e.g., translations, rotations) entreats both theoretical and empirical understanding. Spatial robustness to random translations and rotations is commonly attained via equivariant models (e.g., StdCNNs, GCNNs) and training augmentation, whereas adversarial robustness is typically achieved by adversarial training. In this paper, we prove a quantitative trade-off between spatial and adversarial robustness in a simple statistical setting. We complement this empirically by showing that: (a) as the spatial robustness of equivariant models improves by training augmentation with progressively larger transformations, their adversarial robustness worsens progressively, and (b) as the state-of-the-art robust models are adversarially trained with progressively larger pixel-wise perturbations, their spatial robustness drops progressively. Towards achieving Pareto-optimality in this trade-off, we propose a method based on curriculum learning that trains gradually on more difficult perturbations (both spatial and adversarial) to improve spatial and adversarial robustness simultaneously.
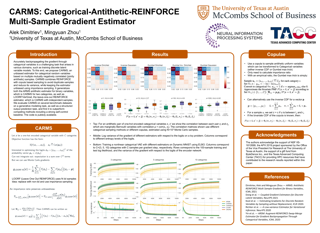
Accurately backpropagating the gradient through categorical variables is a challenging task that arises in various domains, such as training discrete latent variable models. To this end, we propose CARMS, an unbiased estimator for categorical random variables based on multiple mutually negatively correlated (jointly antithetic) samples. CARMS combines REINFORCE with copula based sampling to avoid duplicate samples and reduce its variance, while keeping the estimator unbiased using importance sampling. It generalizes both the ARMS antithetic estimator for binary variables, which is CARMS for two categories, as well as LOORF/VarGrad, the leave-one-out REINFORCE estimator, which is CARMS with independent samples. We evaluate CARMS on several benchmark datasets on a generative modeling task, as well as a structured output prediction task, and find it to outperform competing methods including a strong self-control baseline. The code is publicly available.
Estimating personalized treatment effects from high-dimensional observational data is essential in situations where experimental designs are infeasible, unethical, or expensive. Existing approaches rely on fitting deep models on outcomes observed for treated and control populations. However, when measuring individual outcomes is costly, as is the case of a tumor biopsy, a sample-efficient strategy for acquiring each result is required. Deep Bayesian active learning provides a framework for efficient data acquisition by selecting points with high uncertainty. However, existing methods bias training data acquisition towards regions of non-overlapping support between the treated and control populations. These are not sample-efficient because the treatment effect is not identifiable in such regions. We introduce causal, Bayesian acquisition functions grounded in information theory that bias data acquisition towards regions with overlapping support to maximize sample efficiency for learning personalized treatment effects. We demonstrate the performance of the proposed acquisition strategies on synthetic and semi-synthetic datasets IHDP and CMNIST and their extensions, which aim to simulate common dataset biases and pathologies.

We address the estimation of conditional average treatment effects (CATEs) for structured treatments (e.g., graphs, images, texts). Given a weak condition on the effect, we propose the generalized Robinson decomposition, which (i) isolates the causal estimand (reducing regularization bias), (ii) allows one to plug in arbitrary models for learning, and (iii) possesses a quasi-oracle convergence guarantee under mild assumptions. In experiments with small-world and molecular graphs we demonstrate that our approach outperforms prior work in CATE estimation.
Causal inference and discovery from observational data has been extensively studied across multiple fields. However, most prior work has focused on independent and identically distributed (i.i.d.) data. In this paper, we propose a formalization for causal inference between pairs of event variables in multivariate recurrent event streams by extending Rubin's framework for the average treatment effect (ATE) and propensity scores to multivariate point processes. Analogous to a joint probability distribution representing i.i.d. data, a multivariate point process represents data involving asynchronous and irregularly spaced occurrences of various types of events over a common timeline. We theoretically justify our point process causal framework and show how to obtain unbiased estimates of the proposed measure. We conduct an experimental investigation using synthetic and real-world event datasets, where our proposed causal inference framework is shown to exhibit superior performance against a set of baseline pairwise causal association scores.
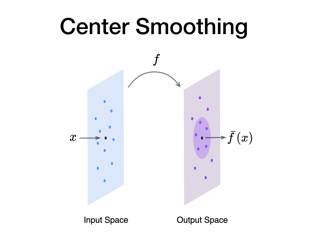
The study of provable adversarial robustness has mostly been limited to classification tasks and models with one-dimensional real-valued outputs. We extend the scope of certifiable robustness to problems with more general and structured outputs like sets, images, language, etc. We model the output space as a metric space under a distance/similarity function, such as intersection-over-union, perceptual similarity, total variation distance, etc. Such models are used in many machine learning problems like image segmentation, object detection, generative models, image/audio-to-text systems, etc. Based on a robustness technique called randomized smoothing, our center smoothing procedure can produce models with the guarantee that the change in the output, as measured by the distance metric, remains small for any norm-bounded adversarial perturbation of the input. We apply our method to create certifiably robust models with disparate output spaces -- from sets to images -- and show that it yields meaningful certificates without significantly degrading the performance of the base model.
Datasets can be biased due to societal inequities, human biases, under-representation of minorities, etc. Our goal is to certify that models produced by a learning algorithm are pointwise-robust to dataset biases. This is a challenging problem: it entails learning models for a large, or even infinite, number of datasets, ensuring that they all produce the same prediction. We focus on decision-tree learning due to the interpretable nature of the models. Our approach allows programmatically specifying \emph{bias models} across a variety of dimensions (e.g., label-flipping or missing data), composing types of bias, and targeting bias towards a specific group. To certify robustness, we use a novel symbolic technique to evaluate a decision-tree learner on a large, or infinite, number of datasets, certifying that each and every dataset produces the same prediction for a specific test point. We evaluate our approach on datasets that are commonly used in the fairness literature, and demonstrate our approach's viability on a range of bias models.
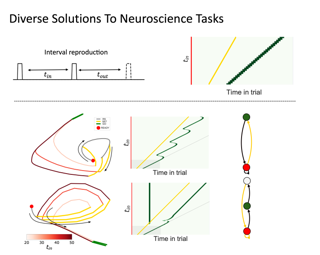
In recent years Recurrent Neural Networks (RNNs) were successfully used to model the way neural activity drives task-related behavior in animals, operating under the implicit assumption that the obtained solutions are universal. Observations in both neuroscience and machine learning challenge this assumption. Animals can approach a given task with a variety of strategies, and training machine learning algorithms introduces the phenomenon of underspecification. These observations imply that every task is associated with a space of solutions. To date, the structure of this space is not understood, limiting the approach of comparing RNNs with neural data.Here, we characterize the space of solutions associated with various tasks. We first study a simple two-neuron network on a task that leads to multiple solutions. We trace the nature of the final solution back to the network’s initial connectivity and identify discrete dynamical regimes that underlie this diversity. We then examine three neuroscience-inspired tasks: Delayed discrimination, Interval discrimination, and Time reproduction. For each task, we find a rich set of solutions. One layer of variability can be found directly in the neural activity of the networks. An additional layer is uncovered by testing the trained networks' ability to extrapolate, as a perturbation to a system …
We introduce REDO, a class-agnostic framework to REconstruct the Dynamic Objects from RGBD or calibrated videos. Compared to prior work, our problem setting is more realistic yet more challenging for three reasons: 1) due to occlusion or camera settings an object of interest may never be entirely visible, but we aim to reconstruct the complete shape; 2) we aim to handle different object dynamics including rigid motion, non-rigid motion, and articulation; 3) we aim to reconstruct different categories of objects with one unified framework. To address these challenges, we develop two novel modules. First, we introduce a canonical 4D implicit function which is pixel-aligned with aggregated temporal visual cues. Second, we develop a 4D transformation module which captures object dynamics to support temporal propagation and aggregation. We study the efficacy of REDO in extensive experiments on synthetic RGBD video datasets SAIL-VOS 3D and DeformingThings4D++, and on real-world video data 3DPW. We find REDO outperforms state-of-the-art dynamic reconstruction methods by a margin. In ablation studies we validate each developed component.

When engineers train deep learning models, they are very much "flying blind". Commonly used methods for real-time training diagnostics, such as monitoring the train/test loss, are limited. Assessing a network's training process solely through these performance indicators is akin to debugging software without access to internal states through a debugger. To address this, we present Cockpit, a collection of instruments that enable a closer look into the inner workings of a learning machine, and a more informative and meaningful status report for practitioners. It facilitates the identification of learning phases and failure modes, like ill-chosen hyperparameters. These instruments leverage novel higher-order information about the gradient distribution and curvature, which has only recently become efficiently accessible. We believe that such a debugging tool, which we open-source for PyTorch, is a valuable help in troubleshooting the training process. By revealing new insights, it also more generally contributes to explainability and interpretability of deep nets.
We present a self-supervised learning framework, COCO-LM, that pretrains Language Models by COrrecting and COntrasting corrupted text sequences. Following ELECTRA-style pretraining, COCO-LM employs an auxiliary language model to corrupt text sequences, upon which it constructs two new tasks for pretraining the main model. The first token-level task, Corrective Language Modeling, is to detect and correct tokens replaced by the auxiliary model, in order to better capture token-level semantics. The second sequence-level task, Sequence Contrastive Learning, is to align text sequences originated from the same source input while ensuring uniformity in the representation space. Experiments on GLUE and SQuAD demonstrate that COCO-LM not only outperforms recent state-of-the-art pretrained models in accuracy, but also improves pretraining efficiency. It achieves the MNLI accuracy of ELECTRA with 50% of its pretraining GPU hours. With the same pretraining steps of standard base/large-sized models, COCO-LM outperforms the previous best models by 1+ GLUE average points.
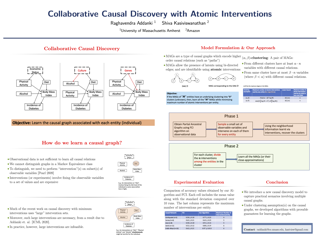
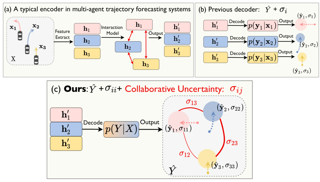
Uncertainty modeling is critical in trajectory-forecasting systems for both interpretation and safety reasons. To better predict the future trajectories of multiple agents, recent works have introduced interaction modules to capture interactions among agents. This approach leads to correlations among the predicted trajectories. However, the uncertainty brought by such correlations is neglected. To fill this gap, we propose a novel concept, collaborative uncertainty (CU), which models the uncertainty resulting from the interaction module. We build a general CU-based framework to make a prediction model learn the future trajectory and the corresponding uncertainty. The CU-based framework is integrated as a plugin module to current state-of-the-art (SOTA) systems and deployed in two special cases based on multivariate Gaussian and Laplace distributions. In each case, we conduct extensive experiments on two synthetic datasets and two public, large-scale benchmarks of trajectory forecasting. The results are promising: 1) The results of synthetic datasets show that CU-based framework allows the model to nicely rebuild the ground-truth distribution. 2) The results of trajectory forecasting benchmarks demonstrate that the CU-based framework steadily helps SOTA systems improve their performances. Specially, the proposed CU-based framework helps VectorNet improve by 57 cm regarding Final Displacement Error on nuScenes dataset. 3) The visualization …
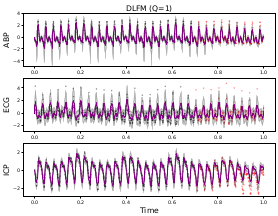
Effectively modeling phenomena present in highly nonlinear dynamical systems whilst also accurately quantifying uncertainty is a challenging task, which often requires problem-specific techniques. We present a novel, domain-agnostic approach to tackling this problem, using compositions of physics-informed random features, derived from ordinary differential equations. The architecture of our model leverages recent advances in approximate inference for deep Gaussian processes, such as layer-wise weight-space approximations which allow us to incorporate random Fourier features, and stochastic variational inference for approximate Bayesian inference. We provide evidence that our model is capable of capturing highly nonlinear behaviour in real-world multivariate time series data. In addition, we find that our approach achieves comparable performance to a number of other probabilistic models on benchmark regression tasks.

Knowledge distillation (KD) addresses model compression by distilling knowledge from a large model (teacher) to a smaller one (student). The existing distillation approaches mainly focus on using different criteria to align the sample representations learned by the student and the teacher, while they fail to transfer the class representations. Good class representations can benefit the sample representation learning by shaping the sample representation distribution. On the other hand, the existing approaches enforce the student to fully imitate the teacher while ignoring the fact that the teacher is typically not perfect. Although the teacher has learned rich and powerful representations, it also contains unignorable bias knowledge which is usually induced by the context prior (e.g., background) in the training data. To address these two issues, in this paper, we propose comprehensive, interventional distillation (CID) that captures both sample and class representations from the teacher while removing the bias with causal intervention. Different from the existing literature that uses the softened logits of the teacher as the training targets, CID considers the softened logits as the context information of an image, which is further used to remove the biased knowledge based on causal inference. Keeping the good representations while removing the bad …
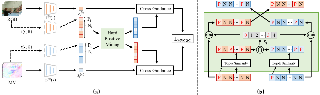
This work concerns self-supervised video representation learning (SSVRL), one topic that has received much attention recently. Since videos are storage-intensive and contain a rich source of visual content, models designed for SSVRL are expected to be storage- and computation-efficient, as well as effective. However, most existing methods only focus on one of the two objectives, failing to consider both at the same time. In this work, for the first time, the seemingly contradictory goals are simultaneously achieved by exploiting compressed videos and capturing mutual information between two input streams. Specifically, a novel Motion Vector based Cross Guidance Contrastive learning approach (MVCGC) is proposed. For storage and computation efficiency, we choose to directly decode RGB frames and motion vectors (that resemble low-resolution optical flows) from compressed videos on-the-fly. To enhance the representation ability of the motion vectors, hence the effectiveness of our method, we design a cross guidance contrastive learning algorithm based on multi-instance InfoNCE loss, where motion vectors can take supervision signals from RGB frames and vice versa. Comprehensive experiments on two downstream tasks show that our MVCGC yields new state-of-the-art while being significantly more efficient than its competitors.
Existing analyses of optimization in deep learning are either continuous, focusing on (variants of) gradient flow, or discrete, directly treating (variants of) gradient descent. Gradient flow is amenable to theoretical analysis, but is stylized and disregards computational efficiency. The extent to which it represents gradient descent is an open question in the theory of deep learning. The current paper studies this question. Viewing gradient descent as an approximate numerical solution to the initial value problem of gradient flow, we find that the degree of approximation depends on the curvature around the gradient flow trajectory. We then show that over deep neural networks with homogeneous activations, gradient flow trajectories enjoy favorable curvature, suggesting they are well approximated by gradient descent. This finding allows us to translate an analysis of gradient flow over deep linear neural networks into a guarantee that gradient descent efficiently converges to global minimum almost surely under random initialization. Experiments suggest that over simple deep neural networks, gradient descent with conventional step size is indeed close to gradient flow. We hypothesize that the theory of gradient flows will unravel mysteries behind deep learning.

Unsupervised domain adaptation which aims to adapt models trained on a labeled source domain to a completely unlabeled target domain has attracted much attention in recent years. While many domain adaptation techniques have been proposed for images, the problem of unsupervised domain adaptation in videos remains largely underexplored. In this paper, we introduce Contrast and Mix (CoMix), a new contrastive learning framework that aims to learn discriminative invariant feature representations for unsupervised video domain adaptation. First, unlike existing methods that rely on adversarial learning for feature alignment, we utilize temporal contrastive learning to bridge the domain gap by maximizing the similarity between encoded representations of an unlabeled video at two different speeds as well as minimizing the similarity between different videos played at different speeds. Second, we propose a novel extension to the temporal contrastive loss by using background mixing that allows additional positives per anchor, thus adapting contrastive learning to leverage action semantics shared across both domains. Moreover, we also integrate a supervised contrastive learning objective using target pseudo-labels to enhance discriminability of the latent space for video domain adaptation. Extensive experiments on several benchmark datasets demonstrate the superiority of our proposed approach over state-of-the-art methods. Project page: https://cvir.github.io/projects/comix.
Normalization techniques have become a basic component in modern convolutional neural networks (ConvNets). In particular, many recent works demonstrate that promoting the orthogonality of the weights helps train deep models and improve robustness. For ConvNets, most existing methods are based on penalizing or normalizing weight matrices derived from concatenating or flattening the convolutional kernels. These methods often destroy or ignore the benign convolutional structure of the kernels; therefore, they are often expensive or impractical for deep ConvNets. In contrast, we introduce a simple and efficient ``Convolutional Normalization'' (ConvNorm) method that can fully exploit the convolutional structure in the Fourier domain and serve as a simple plug-and-play module to be conveniently incorporated into any ConvNets. Our method is inspired by recent work on preconditioning methods for convolutional sparse coding and can effectively promote each layer's channel-wise isometry. Furthermore, we show that our ConvNorm can reduce the layerwise spectral norm of the weight matrices and hence improve the Lipschitzness of the network, leading to easier training and improved robustness for deep ConvNets. Applied to classification under noise corruptions and generative adversarial network (GAN), we show that the ConvNorm improves the robustness of common ConvNets such as ResNet and the performance of GAN. …
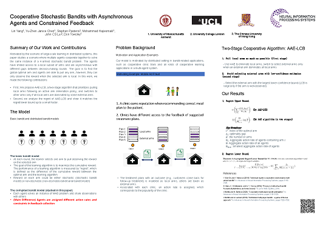
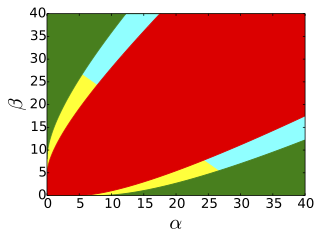
We consider the task of learning latent community structure from multiple correlated networks. First, we study the problem of learning the latent vertex correspondence between two edge-correlated stochastic block models, focusing on the regime where the average degree is logarithmic in the number of vertices. We derive the precise information-theoretic threshold for exact recovery: above the threshold there exists an estimator that outputs the true correspondence with probability close to 1, while below it no estimator can recover the true correspondence with probability bounded away from 0. As an application of our results, we show how one can exactly recover the latent communities using \emph{multiple} correlated graphs in parameter regimes where it is information-theoretically impossible to do so using just a single graph.
The brain solves the credit assignment problem remarkably well. For credit to be assigned across neural networks they must, in principle, wait for specific neural computations to finish. How the brain deals with this inherent locking problem has remained unclear. Deep learning methods suffer from similar locking constraints both on the forward and feedback phase. Recently, decoupled neural interfaces (DNIs) were introduced as a solution to the forward and feedback locking problems in deep networks.Here we propose that a specialised brain region, the cerebellum, helps the cerebral cortex solve similar locking problems akin to DNIs. To demonstrate the potential of this framework we introduce a systems-level model in which a recurrent cortical network receives online temporal feedback predictions from a cerebellar module. We test this cortico-cerebellar recurrent neural network (ccRNN) model on a number of sensorimotor (line and digit drawing) and cognitive tasks (pattern recognition and caption generation) that have been shown to be cerebellar-dependent. In all tasks, we observe that ccRNNs facilitates learning while reducing ataxia-like behaviours, consistent with classical experimental observations. Moreover, our model also explains recent behavioural and neuronal observations while making several testable predictions across multiple levels.Overall, our work offers a novel perspective on the cerebellum …
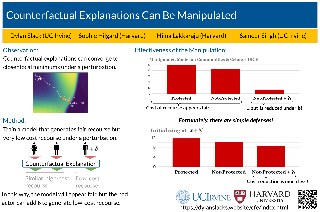
Counterfactual explanations are emerging as an attractive option for providing recourse to individuals adversely impacted by algorithmic decisions. As they are deployed in critical applications (e.g. law enforcement, financial lending), it becomes important to ensure that we clearly understand the vulnerabilties of these methods and find ways to address them. However, there is little understanding of the vulnerabilities and shortcomings of counterfactual explanations. In this work, we introduce the first framework that describes the vulnerabilities of counterfactual explanations and shows how they can be manipulated. More specifically, we show counterfactual explanations may converge to drastically different counterfactuals under a small perturbation indicating they are not robust. Leveraging this insight, we introduce a novel objective to train seemingly fair models where counterfactual explanations find much lower cost recourse under a slight perturbation. We describe how these models can unfairly provide low-cost recourse for specific subgroups in the data while appearing fair to auditors. We perform experiments on loan and violent crime prediction data sets where certain subgroups achieve up to 20x lower cost recourse under the perturbation. These results raise concerns regarding the dependability of current counterfactual explanation techniques, which we hope will inspire investigations in robust counterfactual explanations.
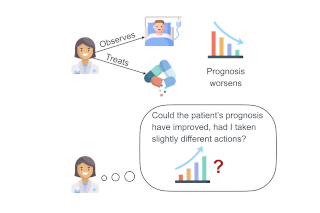
Methods to find counterfactual explanations have predominantly focused on one-step decision making processes. In this work, we initiate the development of methods to find counterfactual explanations for decision making processes in which multiple, dependent actions are taken sequentially over time. We start by formally characterizing a sequence of actions and states using finite horizon Markov decision processes and the Gumbel-Max structural causal model. Building upon this characterization, we formally state the problem of finding counterfactual explanations for sequential decision making processes. In our problem formulation, the counterfactual explanation specifies an alternative sequence of actions differing in at most k actions from the observed sequence that could have led the observed process realization to a better outcome. Then, we introduce a polynomial time algorithm based on dynamic programming to build a counterfactual policy that is guaranteed to always provide the optimal counterfactual explanation on every possible realization of the counterfactual environment dynamics. We validate our algorithm using both synthetic and real data from cognitive behavioral therapy and show that the counterfactual explanations our algorithm finds can provide valuable insights to enhance sequential decision making under uncertainty.
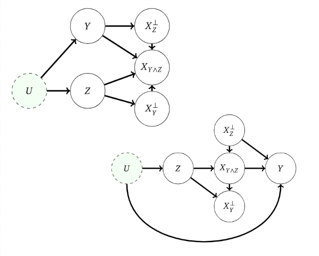
Informally, a 'spurious correlation' is the dependence of a model on some aspect of the input data that an analyst thinks shouldn't matter. In machine learning, these have a know-it-when-you-see-it character; e.g., changing the gender of a sentence's subject changes a sentiment predictor's output. To check for spurious correlations, we can 'stress test' models by perturbing irrelevant parts of input data and seeing if model predictions change. In this paper, we study stress testing using the tools of causal inference. We introduce counterfactual invariance as a formalization of the requirement that changing irrelevant parts of the input shouldn't change model predictions. We connect counterfactual invariance to out-of-domain model performance, and provide practical schemes for learning (approximately) counterfactual invariant predictors (without access to counterfactual examples). It turns out that both the means and implications of counterfactual invariance depend fundamentally on the true underlying causal structure of the data---in particular, whether the label causes the features or the features cause the label. Distinct causal structures require distinct regularization schemes to induce counterfactual invariance. Similarly, counterfactual invariance implies different domain shift guarantees depending on the underlying causal structure. This theory is supported by empirical results on text classification.
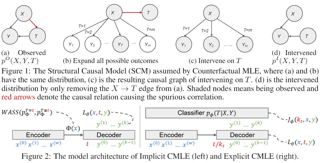
Although deep learning models have driven state-of-the-art performance on a wide array of tasks, they are prone to spurious correlations that should not be learned as predictive clues. To mitigate this problem, we propose a causality-based training framework to reduce the spurious correlations caused by observed confounders. We give theoretical analysis on the underlying general Structural Causal Model (SCM) and propose to perform Maximum Likelihood Estimation (MLE) on the interventional distribution instead of the observational distribution, namely Counterfactual Maximum Likelihood Estimation (CMLE). As the interventional distribution, in general, is hidden from the observational data, we then derive two different upper bounds of the expected negative log-likelihood and propose two general algorithms, Implicit CMLE and Explicit CMLE, for causal predictions of deep learning models using observational data. We conduct experiments on both simulated data and two real-world tasks: Natural Language Inference (NLI) and Image Captioning. The results show that CMLE methods outperform the regular MLE method in terms of out-of-domain generalization performance and reducing spurious correlations, while maintaining comparable performance on the regular evaluations.
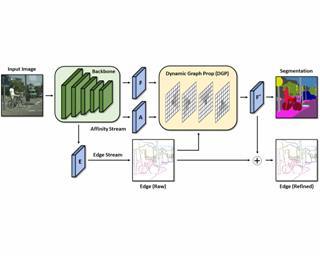
Image segmentation and edge detection are both central problems in perceptual grouping. It is therefore interesting to study how these two tasks can be coupled to benefit each other. Indeed, segmentation can be easily transformed into contour edges to guide edge learning. However, the converse is nontrivial since general edges may not always form closed contours. In this paper, we propose a principled end-to-end framework for coupled edge and segmentation learning, where edges are leveraged as pairwise similarity cues to guide segmentation. At the core of our framework is a recurrent module termed as dynamic graph propagation (DGP) layer that performs message passing on dynamically constructed graphs. The layer uses learned gating to dynamically select neighbors for message passing using max-pooling. The output from message passing is further gated with an edge signal to refine segmentation. Experiments demonstrate that the proposed framework is able to let both tasks mutually improve each other. On Cityscapes validation, our best model achieves 83.7% mIoU in semantic segmentation and 78.7% maximum F-score in semantic edge detection. Our method also leads to improved zero-shot robustness on Cityscapes with natural corruptions (Cityscapes-C).
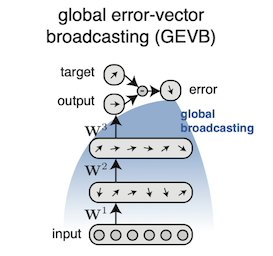
Backpropagation (BP) uses detailed, unit-specific feedback to train deep neural networks (DNNs) with remarkable success. That biological neural circuits appear to perform credit assignment, but cannot implement BP, implies the existence of other powerful learning algorithms. Here, we explore the extent to which a globally broadcast learning signal, coupled with local weight updates, enables training of DNNs. We present both a learning rule, called global error-vector broadcasting (GEVB), and a class of DNNs, called vectorized nonnegative networks (VNNs), in which this learning rule operates. VNNs have vector-valued units and nonnegative weights past the first layer. The GEVB learning rule generalizes three-factor Hebbian learning, updating each weight by an amount proportional to the inner product of the presynaptic activation and a globally broadcast error vector when the postsynaptic unit is active. We prove that these weight updates are matched in sign to the gradient, enabling accurate credit assignment. Moreover, at initialization, these updates are exactly proportional to the gradient in the limit of infinite network width. GEVB matches the performance of BP in VNNs, and in some cases outperforms direct feedback alignment (DFA) applied in conventional networks. Unlike DFA, GEVB successfully trains convolutional layers. Altogether, our theoretical and empirical results point …
Secure multi-party computation (MPC) allows parties to perform computations on data while keeping that data private. This capability has great potential for machine-learning applications: it facilitates training of machine-learning models on private data sets owned by different parties, evaluation of one party's private model using another party's private data, etc. Although a range of studies implement machine-learning models via secure MPC, such implementations are not yet mainstream. Adoption of secure MPC is hampered by the absence of flexible software frameworks that `"speak the language" of machine-learning researchers and engineers. To foster adoption of secure MPC in machine learning, we present CrypTen: a software framework that exposes popular secure MPC primitives via abstractions that are common in modern machine-learning frameworks, such as tensor computations, automatic differentiation, and modular neural networks. This paper describes the design of CrypTen and measure its performance on state-of-the-art models for text classification, speech recognition, and image classification. Our benchmarks show that CrypTen's GPU support and high-performance communication between (an arbitrary number of) parties allows it to perform efficient private evaluation of modern machine-learning models under a semi-honest threat model. For example, two parties using CrypTen can securely predict phonemes in speech recordings using Wav2Letter faster than …
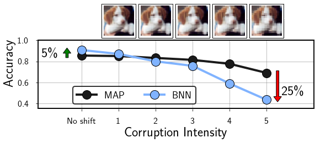
Approximate Bayesian inference for neural networks is considered a robust alternative to standard training, often providing good performance on out-of-distribution data. However, Bayesian neural networks (BNNs) with high-fidelity approximate inference via full-batch Hamiltonian Monte Carlo achieve poor generalization under covariate shift, even underperforming classical estimation. We explain this surprising result, showing how a Bayesian model average can in fact be problematic under covariate shift, particularly in cases where linear dependencies in the input features cause a lack of posterior contraction. We additionally show why the same issue does not affect many approximate inference procedures, or classical maximum a-posteriori (MAP) training. Finally, we propose novel priors that improve the robustness of BNNs to many sources of covariate shift.
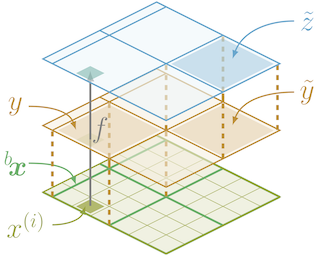
Refining low-resolution (LR) spatial fields with high-resolution (HR) information, often known as statistical downscaling, is challenging as the diversity of spatial datasets often prevents direct matching of observations. Yet, when LR samples are modeled as aggregate conditional means of HR samples with respect to a mediating variable that is globally observed, the recovery of the underlying fine-grained field can be framed as taking an "inverse" of the conditional expectation, namely a deconditioning problem. In this work, we propose a Bayesian formulation of deconditioning which naturally recovers the initial reproducing kernel Hilbert space formulation from Hsu and Ramos (2019). We extend deconditioning to a downscaling setup and devise efficient conditional mean embedding estimator for multiresolution data. By treating conditional expectations as inter-domain features of the underlying field, a posterior for the latent field can be established as a solution to the deconditioning problem. Furthermore, we show that this solution can be viewed as a two-staged vector-valued kernel ridge regressor and show that it has a minimax optimal convergence rate under mild assumptions. Lastly, we demonstrate its proficiency in a synthetic and a real-world atmospheric field downscaling problem, showing substantial improvements over existing methods.
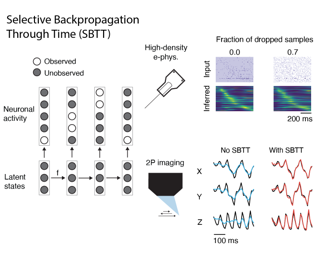
Modern neural interfaces allow access to the activity of up to a million neurons within brain circuits. However, bandwidth limits often create a trade-off between greater spatial sampling (more channels or pixels) and the temporal frequency of sampling. Here we demonstrate that it is possible to obtain spatio-temporal super-resolution in neuronal time series by exploiting relationships among neurons, embedded in latent low-dimensional population dynamics. Our novel neural network training strategy, selective backpropagation through time (SBTT), enables learning of deep generative models of latent dynamics from data in which the set of observed variables changes at each time step. The resulting models are able to infer activity for missing samples by combining observations with learned latent dynamics. We test SBTT applied to sequential autoencoders and demonstrate more efficient and higher-fidelity characterization of neural population dynamics in electrophysiological and calcium imaging data. In electrophysiology, SBTT enables accurate inference of neuronal population dynamics with lower interface bandwidths, providing an avenue to significant power savings for implanted neuroelectronic interfaces. In applications to two-photon calcium imaging, SBTT accurately uncovers high-frequency temporal structure underlying neural population activity, substantially outperforming the current state-of-the-art. Finally, we demonstrate that performance could be further improved by using limited, high-bandwidth sampling …
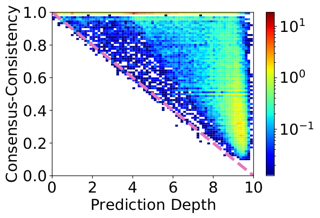
Existing work on understanding deep learning often employs measures that compress all data-dependent information into a few numbers. In this work, we adopt a perspective based on the role of individual examples. We introduce a measure of the computational difficulty of making a prediction for a given input: the (effective) prediction depth. Our extensive investigation reveals surprising yet simple relationships between the prediction depth of a given input and the model’s uncertainty, confidence, accuracy and speed of learning for that data point. We further categorize difficult examples into three interpretable groups, demonstrate how these groups are processed differently inside deep models and showcase how this understanding allows us to improve prediction accuracy. Insights from our study lead to a coherent view of a number of separately reported phenomena in the literature: early layers generalize while later layers memorize; early layers converge faster and networks learn easy data and simple functions first.
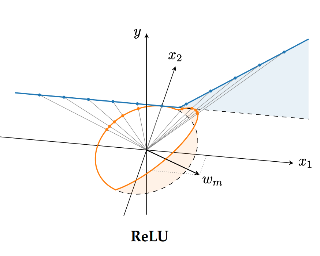
Neural networks and Gaussian processes are complementary in their strengths and weaknesses. Having a better understanding of their relationship comes with the promise to make each method benefit from the strengths of the other. In this work, we establish an equivalence between the forward passes of neural networks and (deep) sparse Gaussian process models. The theory we develop is based on interpreting activation functions as interdomain inducing features through a rigorous analysis of the interplay between activation functions and kernels. This results in models that can either be seen as neural networks with improved uncertainty prediction or deep Gaussian processes with increased prediction accuracy. These claims are supported by experimental results on regression and classification datasets.
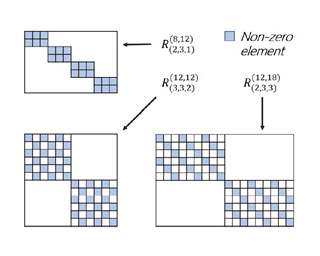
We introduce a new kind of linear transform named Deformable Butterfly (DeBut) that generalizes the conventional butterfly matrices and can be adapted to various input-output dimensions. It inherits the fine-to-coarse-grained learnable hierarchy of traditional butterflies and when deployed to neural networks, the prominent structures and sparsity in a DeBut layer constitutes a new way for network compression. We apply DeBut as a drop-in replacement of standard fully connected and convolutional layers, and demonstrate its superiority in homogenizing a neural network and rendering it favorable properties such as light weight and low inference complexity, without compromising accuracy. The natural complexity-accuracy tradeoff arising from the myriad deformations of a DeBut layer also opens up new rooms for analytical and practical research. The codes and Appendix are publicly available at: https://github.com/ruilin0212/DeBut.

We present a novel approach to unsupervised learning for video object segmentation (VOS). Unlike previous work, our formulation allows to learn dense feature representations directly in a fully convolutional regime. We rely on uniform grid sampling to extract a set of anchors and train our model to disambiguate between them on both inter- and intra-video levels. However, a naive scheme to train such a model results in a degenerate solution. We propose to prevent this with a simple regularisation scheme, accommodating the equivariance property of the segmentation task to similarity transformations. Our training objective admits efficient implementation and exhibits fast training convergence. On established VOS benchmarks, our approach exceeds the segmentation accuracy of previous work despite using significantly less training data and compute power.
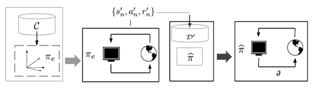
In the stochastic linear contextual bandit setting there exist several minimax procedures for exploration with policies that are reactive to the data being acquired. In practice, there can be a significant engineering overhead to deploy these algorithms, especially when the dataset is collected in a distributed fashion or when a human in the loop is needed to implement a different policy. Exploring with a single non-reactive policy is beneficial in such cases. Assuming some batch contexts are available, we design a single stochastic policy to collect a good dataset from which a near-optimal policy can be extracted. We present a theoretical analysis as well as numerical experiments on both synthetic and real-world datasets.
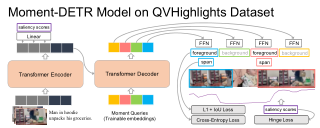
Detecting customized moments and highlights from videos given natural language (NL) user queries is an important but under-studied topic. One of the challenges in pursuing this direction is the lack of annotated data. To address this issue, we present the Query-based Video Highlights (QVHighlights) dataset. It consists of over 10,000 YouTube videos, covering a wide range of topics, from everyday activities and travel in lifestyle vlog videos to social and political activities in news videos. Each video in the dataset is annotated with: (1) a human-written free-form NL query, (2) relevant moments in the video w.r.t. the query, and (3) five-point scale saliency scores for all query-relevant clips. This comprehensive annotation enables us to develop and evaluate systems that detect relevant moments as well as salient highlights for diverse, flexible user queries. We also present a strong baseline for this task, Moment-DETR, a transformer encoder-decoder model that views moment retrieval as a direct set prediction problem, taking extracted video and query representations as inputs and predicting moment coordinates and saliency scores end-to-end. While our model does not utilize any human prior, we show that it performs competitively when compared to well-engineered architectures. With weakly supervised pretraining using ASR captions, Moment-DETR …
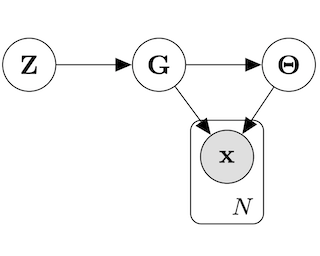
Bayesian structure learning allows inferring Bayesian network structure from data while reasoning about the epistemic uncertainty---a key element towards enabling active causal discovery and designing interventions in real world systems. In this work, we propose a general, fully differentiable framework for Bayesian structure learning (DiBS) that operates in the continuous space of a latent probabilistic graph representation. Contrary to existing work, DiBS is agnostic to the form of the local conditional distributions and allows for joint posterior inference of both the graph structure and the conditional distribution parameters. This makes our formulation directly applicable to posterior inference of nonstandard Bayesian network models, e.g., with nonlinear dependencies encoded by neural networks. Using DiBS, we devise an efficient, general purpose variational inference method for approximating distributions over structural models. In evaluations on simulated and real-world data, our method significantly outperforms related approaches to joint posterior inference.
Annealed importance sampling (AIS) and related algorithms are highly effective tools for marginal likelihood estimation, but are not fully differentiable due to the use of Metropolis-Hastings correction steps. Differentiability is a desirable property as it would admit the possibility of optimizing marginal likelihood as an objective using gradient-based methods. To this end, we propose Differentiable AIS (DAIS), a variant of AIS which ensures differentiability by abandoning the Metropolis-Hastings corrections. As a further advantage, DAIS allows for mini-batch gradients. We provide a detailed convergence analysis for Bayesian linear regression which goes beyond previous analyses by explicitly accounting for the sampler not having reached equilibrium. Using this analysis, we prove that DAIS is consistent in the full-batch setting and provide a sublinear convergence rate. Furthermore, motivated by the problem of learning from large-scale datasets, we study a stochastic variant of DAIS that uses mini-batch gradients. Surprisingly, stochastic DAIS can be arbitrarily bad due to a fundamental incompatibility between the goals of last-iterate convergence to the posterior and elimination of the accumulated stochastic error. This is in stark contrast with other settings such as gradient-based optimization and Langevin dynamics, where the effect of gradient noise can be washed out by taking smaller steps. …
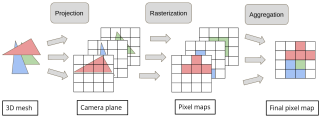
Reasoning about 3D scenes from their 2D image projections is one of the core problems in computer vision. Solutions to this inverse and ill-posed problem typically involve a search for models that best explain observed image data. Notably, images depend both on the properties of observed scenes and on the process of image formation. Hence, if optimization techniques should be used to explain images, it is crucial to design differentable functions for the projection of 3D scenes into images, also known as differentiable rendering. Previous approaches to differentiable rendering typically replace non-differentiable operations by smooth approximations, impacting the subsequent 3D estimation. In this paper, we take a more general approach and study differentiable renderers through the prism of randomized optimization and the related notion of perturbed optimizers. In particular, our work highlights the link between some well-known differentiable renderer formulations and randomly smoothed optimizers, and introduces differentiable perturbed renderers. We also propose a variance reduction mechanism to alleviate the computational burden inherent to perturbed optimizers and introduce an adaptive scheme to automatically adjust the smoothing parameters of the rendering process. We apply our method to 3D scene reconstruction and demonstrate its advantages on the tasks of 6D pose estimation and …

Systems neuroscience aims to understand how networks of neurons distributed throughout the brain mediate computational tasks. One popular approach to identify those networks is to first calculate measures of neural activity (e.g. power spectra) from multiple brain regions, and then apply a linear factor model to those measures. Critically, despite the established role of directed communication between brain regions in neural computation, measures of directed communication have been rarely utilized in network estimation because they are incompatible with the implicit assumptions of the linear factor model approach. Here, we develop a novel spectral measure of directed communication called the Directed Spectrum (DS). We prove that it is compatible with the implicit assumptions of linear factor models, and we provide a method to estimate the DS. We demonstrate that latent linear factor models of DS measures better capture underlying brain networks in both simulated and real neural recording data compared to available alternatives. Thus, linear factor models of the Directed Spectrum offer neuroscientists a simple and effective way to explicitly model directed communication in networks of neural populations.
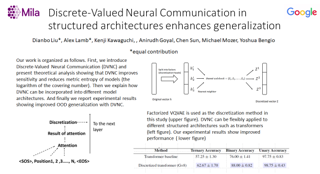
Deep learning has advanced from fully connected architectures to structured models organized into components, e.g., the transformer composed of positional elements, modular architectures divided into slots, and graph neural nets made up of nodes. The nature of structured models is that communication among the components has a bottleneck, typically achieved by restricted connectivity and attention. In this work, we further tighten the bottleneck via discreteness of the representations transmitted between components. We hypothesize that this constraint serves as a useful form of inductive bias. Our hypothesis is motivated by past empirical work showing the benefits of discretization in non-structured architectures as well as our own theoretical results showing that discretization increases noise robustness and reduces the underlying dimensionality of the model. Building on an existing technique for discretization from the VQ-VAE, we consider multi-headed discretization with shared codebooks as the output of each architectural component. One motivating intuition is human language in which communication occurs through multiple discrete symbols. This form of communication is hypothesized to facilitate transmission of information between functional components of the brain by providing a common interlingua, just as it does for human-to-human communication. Our experiments show that discrete-valued neural communication (DVNC) substantially improves systematic generalization …
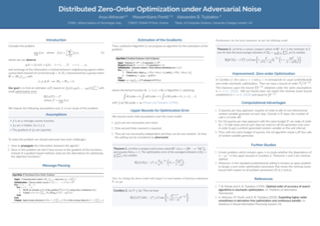
We study the problem of distributed zero-order optimization for a class of strongly convex functions. They are formed by the average of local objectives, associated to different nodes in a prescribed network. We propose a distributed zero-order projected gradient descent algorithm to solve the problem. Exchange of information within the network is permitted only between neighbouring nodes. An important feature of our procedure is that it can query only function values, subject to a general noise model, that does not require zero mean or independent errors. We derive upper bounds for the average cumulative regret and optimization error of the algorithm which highlight the role played by a network connectivity parameter, the number of variables, the noise level, the strong convexity parameter, and smoothness properties of the local objectives. The bounds indicate some key improvements of our method over the state-of-the-art, both in the distributed and standard zero-order optimization settings.
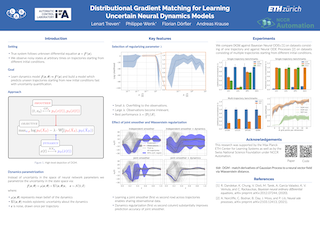
Differential equations in general and neural ODEs in particular are an essential technique in continuous-time system identification. While many deterministic learning algorithms have been designed based on numerical integration via the adjoint method, many downstream tasks such as active learning, exploration in reinforcement learning, robust control, or filtering require accurate estimates of predictive uncertainties. In this work, we propose a novel approach towards estimating epistemically uncertain neural ODEs, avoiding the numerical integration bottleneck. Instead of modeling uncertainty in the ODE parameters, we directly model uncertainties in the state space. Our algorithm distributional gradient matching (DGM) jointly trains a smoother and a dynamics model and matches their gradients via minimizing a Wasserstein loss. Our experiments show that, compared to traditional approximate inference methods based on numerical integration, our approach is faster to train, faster at predicting previously unseen trajectories, and in the context of neural ODEs, significantly more accurate.
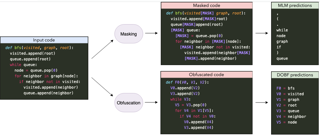
Recent advances in self-supervised learning have dramatically improved the state of the art on a wide variety of tasks. However, research in language model pre-training has mostly focused on natural languages, and it is unclear whether models like BERT and its variants provide the best pre-training when applied to other modalities, such as source code. In this paper, we introduce a new pre-training objective, DOBF, that leverages the structural aspect of programming languages and pre-trains a model to recover the original version of obfuscated source code. We show that models pre-trained with DOBF significantly outperform existing approaches on multiple downstream tasks, providing relative improvements of up to 12.2% in unsupervised code translation, and 5.3% in natural language code search. Incidentally, we found that our pre-trained model is able to deobfuscate fully obfuscated source files, and to suggest descriptive variable names.
Domain generalization refers to the problem where we aim to train a model on data from a set of source domains so that the model can generalize to unseen target domains. Naively training a model on the aggregate set of data (pooled from all source domains) has been shown to perform suboptimally, since the information learned by that model might be domain-specific and generalize imperfectly to target domains. To tackle this problem, a predominant domain generalization approach is to learn some domain-invariant information for the prediction task, aiming at a good generalization across domains. In this paper, we propose a theoretically grounded method to learn a domain-invariant representation by enforcing the representation network to be invariant under all transformation functions among domains. We next introduce the use of generative adversarial networks to learn such domain transformations in a possible implementation of our method in practice. We demonstrate the effectiveness of our method on several widely used datasets for the domain generalization problem, on all of which we achieve competitive results with state-of-the-art models.
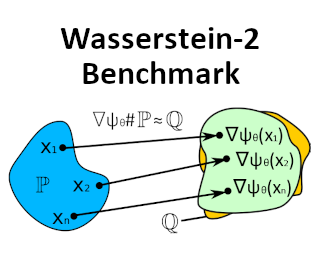
Despite the recent popularity of neural network-based solvers for optimal transport (OT), there is no standard quantitative way to evaluate their performance. In this paper, we address this issue for quadratic-cost transport---specifically, computation of the Wasserstein-2 distance, a commonly-used formulation of optimal transport in machine learning. To overcome the challenge of computing ground truth transport maps between continuous measures needed to assess these solvers, we use input-convex neural networks (ICNN) to construct pairs of measures whose ground truth OT maps can be obtained analytically. This strategy yields pairs of continuous benchmark measures in high-dimensional spaces such as spaces of images. We thoroughly evaluate existing optimal transport solvers using these benchmark measures. Even though these solvers perform well in downstream tasks, many do not faithfully recover optimal transport maps. To investigate the cause of this discrepancy, we further test the solvers in a setting of image generation. Our study reveals crucial limitations of existing solvers and shows that increased OT accuracy does not necessarily correlate to better results downstream.
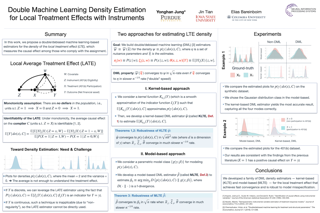
Local treatment effects are a common quantity found throughout the empirical sciences that measure the treatment effect among those who comply with what they are assigned. Most of the literature is focused on estimating the average of such quantity, which is called the ``local average treatment effect (LATE)'' [Imbens and Angrist, 1994]). In this work, we study how to estimate the density of the local treatment effect, which is naturally more informative than its average. Specifically, we develop two families of methods for this task, namely, kernel-smoothing and model-based approaches. The kernel-smoothing-based approach estimates the density through some smooth kernel functions. The model-based approach estimates the density by projecting it onto a finite-dimensional density class. For both approaches, we derive the corresponding double/debiased machine learning-based estimators [Chernozhukov et al., 2018]. We further study the asymptotic convergence rates of the estimators and show that they are robust to the biases in nuisance function estimation. The use of the proposed methods is illustrated through both synthetic and a real dataset called 401(k).
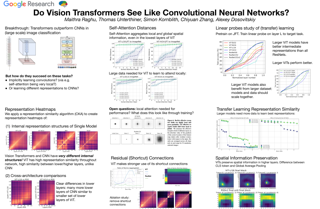
Convolutional neural networks (CNNs) have so far been the de-facto model for visual data. Recent work has shown that (Vision) Transformer models (ViT) can achieve comparable or even superior performance on image classification tasks. This raises a central question: how are Vision Transformers solving these tasks? Are they acting like convolutional networks, or learning entirely different visual representations? Analyzing the internal representation structure of ViTs and CNNs on image classification benchmarks, we find striking differences between the two architectures, such as ViT having more uniform representations across all layers. We explore how these differences arise, finding crucial roles played by self-attention, which enables early aggregation of global information, and ViT residual connections, which strongly propagate features from lower to higher layers. We study the ramifications for spatial localization, demonstrating ViTs successfully preserve input spatial information, with noticeable effects from different classification methods. Finally, we study the effect of (pretraining) dataset scale on intermediate features and transfer learning, and conclude with a discussion on connections to new architectures such as the MLP-Mixer.
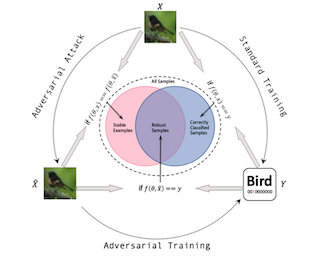
Adversarial training is a powerful type of defense against adversarial examples. Previous empirical results suggest that adversarial training requires wider networks for better performances. However, it remains elusive how does neural network width affect model robustness. In this paper, we carefully examine the relationship between network width and model robustness. Specifically, we show that the model robustness is closely related to the tradeoff between natural accuracy and perturbation stability, which is controlled by the robust regularization parameter λ. With the same λ, wider networks can achieve better natural accuracy but worse perturbation stability, leading to a potentially worse overall model robustness. To understand the origin of this phenomenon, we further relate the perturbation stability with the network's local Lipschitzness. By leveraging recent results on neural tangent kernels, we theoretically show that wider networks tend to have worse perturbation stability. Our analyses suggest that: 1) the common strategy of first fine-tuning λ on small networks and then directly use it for wide model training could lead to deteriorated model robustness; 2) one needs to properly enlarge λ to unleash the robustness potential of wider models fully. Finally, we propose a new Width Adjusted Regularization (WAR) method that adaptively enlarges λ on …
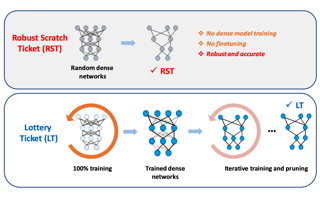
Deep Neural Networks (DNNs) are known to be vulnerable to adversarial attacks, i.e., an imperceptible perturbation to the input can mislead DNNs trained on clean images into making erroneous predictions. To tackle this, adversarial training is currently the most effective defense method, by augmenting the training set with adversarial samples generated on the fly. \textbf{Interestingly, we discover for the first time that there exist subnetworks with inborn robustness, matching or surpassing the robust accuracy of the adversarially trained networks with comparable model sizes, within randomly initialized networks without any model training}, indicating that adversarial training on model weights is not indispensable towards adversarial robustness. We name such subnetworks Robust Scratch Tickets (RSTs), which are also by nature efficient. Distinct from the popular lottery ticket hypothesis, neither the original dense networks nor the identified RSTs need to be trained. To validate and understand this fascinating finding, we further conduct extensive experiments to study the existence and properties of RSTs under different models, datasets, sparsity patterns, and attacks, drawing insights regarding the relationship between DNNs’ robustness and their initialization/overparameterization. Furthermore, we identify the poor adversarial transferability between RSTs of different sparsity ratios drawn from the same randomly initialized dense network, and propose …
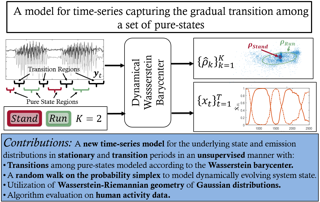
Many time series can be modeled as a sequence of segments representing high-level discrete states, such as running and walking in a human activity application. Flexible models should describe the system state and observations in stationary ``pure-state'' periods as well as transition periods between adjacent segments, such as a gradual slowdown between running and walking. However, most prior work assumes instantaneous transitions between pure discrete states. We propose a dynamical Wasserstein barycentric (DWB) model that estimates the system state over time as well as the data-generating distributions of pure states in an unsupervised manner. Our model assumes each pure state generates data from a multivariate normal distribution, and characterizes transitions between states via displacement-interpolation specified by the Wasserstein barycenter. The system state is represented by a barycentric weight vector which evolves over time via a random walk on the simplex. Parameter learning leverages the natural Riemannian geometry of Gaussian distributions under the Wasserstein distance, which leads to improved convergence speeds. Experiments on several human activity datasets show that our proposed DWB model accurately learns the generating distribution of pure states while improving state estimation for transition periods compared to the commonly used linear interpolation mixture models.
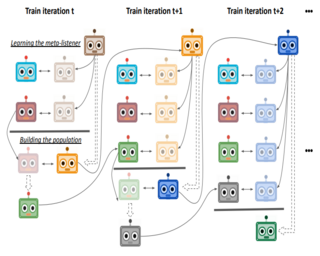
In this work, our goal is to train agents that can coordinate with seen, unseen as well as human partners in a multi-agent communication environment involving natural language. Previous work using a single set of agents has shown great progress in generalizing to known partners, however it struggles when coordinating with unfamiliar agents. To mitigate that, recent work explored the use of population-based approaches, where multiple agents interact with each other with the goal of learning more generic protocols. These methods, while able to result in good coordination between unseen partners, still only achieve so in cases of simple languages, thus failing to adapt to human partners using natural language. We attribute this to the use of static populations and instead propose a dynamic population-based meta-learning approach that builds such a population in an iterative manner. We perform a holistic evaluation of our method on two different referential games, and show that our agents outperform all prior work when communicating with seen partners and humans. Furthermore, we analyze the natural language generation skills of our agents, where we find that our agents also outperform strong baselines. Finally, we test the robustness of our agents when communicating with out-of-population agents and …
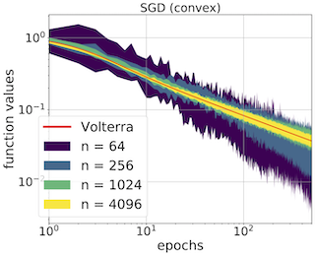
We analyze a class of stochastic gradient algorithms with momentum on a high-dimensional random least squares problem. Our framework, inspired by random matrix theory, provides an exact (deterministic) characterization for the sequence of function values produced by these algorithms which is expressed only in terms of the eigenvalues of the Hessian. This leads to simple expressions for nearly-optimal hyperparameters, a description of the limiting neighborhood, and average-case complexity. As a consequence, we show that (small-batch) stochastic heavy-ball momentum with a fixed momentum parameter provides no actual performance improvement over SGD when step sizes are adjusted correctly. For contrast, in the non-strongly convex setting, it is possible to get a large improvement over SGD using momentum. By introducing hyperparameters that depend on the number of samples, we propose a new algorithm sDANA (stochastic dimension adjusted Nesterov acceleration) which obtains an asymptotically optimal average-case complexity while remaining linearly convergent in the strongly convex setting without adjusting parameters.

Vision transformer (ViT) models exhibit substandard optimizability. In particular, they are sensitive to the choice of optimizer (AdamW vs. SGD), optimizer hyperparameters, and training schedule length. In comparison, modern convolutional neural networks are easier to optimize. Why is this the case? In this work, we conjecture that the issue lies with the patchify stem of ViT models, which is implemented by a stride-p p×p convolution (p = 16 by default) applied to the input image. This large-kernel plus large-stride convolution runs counter to typical design choices of convolutional layers in neural networks. To test whether this atypical design choice causes an issue, we analyze the optimization behavior of ViT models with their original patchify stem versus a simple counterpart where we replace the ViT stem by a small number of stacked stride-two 3×3 convolutions. While the vast majority of computation in the two ViT designs is identical, we find that this small change in early visual processing results in markedly different training behavior in terms of the sensitivity to optimization settings as well as the final model accuracy. Using a convolutional stem in ViT dramatically increases optimization stability and also improves peak performance (by ∼1-2% top-1 accuracy on ImageNet-1k), while …
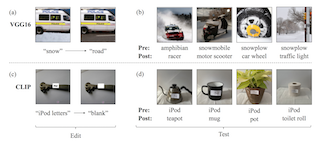
We propose a methodology for modifying the behavior of a classifier by directly rewriting its prediction rules. Our method requires virtually no additional data collection and can be applied to a variety of settings, including adapting a model to new environments, and modifying it to ignore spurious features.
We analyze the complexity of learning directed acyclic graphical models from observational data in general settings without specific distributional assumptions. Our approach is information-theoretic and uses a local Markov boundary search procedure in order to recursively construct ancestral sets in the underlying graphical model. Perhaps surprisingly, we show that for certain graph ensembles, a simple forward greedy search algorithm (i.e. without a backward pruning phase) suffices to learn the Markov boundary of each node. This substantially improves the sample complexity, which we show is at most polynomial in the number of nodes. This is then applied to learn the entire graph under a novel identifiability condition that generalizes existing conditions from the literature. As a matter of independent interest, we establish finite-sample guarantees for the problem of recovering Markov boundaries from data. Moreover, we apply our results to the special case of polytrees, for which the assumptions simplify, and provide explicit conditions under which polytrees are identifiable and learnable in polynomial time. We further illustrate the performance of the algorithm, which is easy to implement, in a simulation study. Our approach is general, works for discrete or continuous distributions without distributional assumptions, and as such sheds light on the minimal …
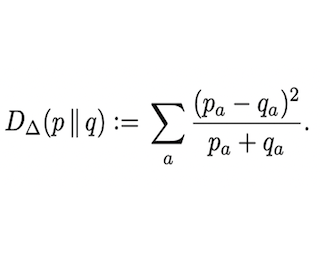
A recurring theme in statistical learning, online learning, and beyond is that faster convergence rates are possible for problems with low noise, often quantified by the performance of the best hypothesis; such results are known as first-order or small-loss guarantees. While first-order guarantees are relatively well understood in statistical and online learning, adapting to low noise in contextual bandits (and more broadly, decision making) presents major algorithmic challenges. In a COLT 2017 open problem, Agarwal, Krishnamurthy, Langford, Luo, and Schapire asked whether first-order guarantees are even possible for contextual bandits and---if so---whether they can be attained by efficient algorithms. We give a resolution to this question by providing an optimal and efficient reduction from contextual bandits to online regression with the logarithmic (or, cross-entropy) loss. Our algorithm is simple and practical, readily accommodates rich function classes, and requires no distributional assumptions beyond realizability. In a large-scale empirical evaluation, we find that our approach typically outperforms comparable non-first-order methods.On the technical side, we show that the logarithmic loss and an information-theoretic quantity called the triangular discrimination play a fundamental role in obtaining first-order guarantees, and we combine this observation with new refinements to the regression oracle reduction framework of Foster and …
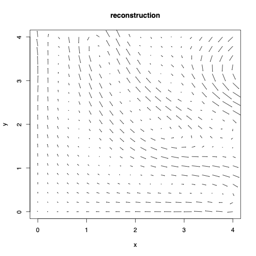
Methods for inference and simulation of linearly constrained Gaussian Markov Random Fields (GMRF) are computationally prohibitive when the number of constraints is large. In some cases, such as for intrinsic GMRFs, they may even be unfeasible. We propose a new class of methods to overcome these challenges in the common case of sparse constraints, where one has a large number of constraints and each only involves a few elements. Our methods rely on a basis transformation into blocks of constrained versus non-constrained subspaces, and we show that the methods greatly outperform existing alternatives in terms of computational cost. By combining the proposed methods with the stochastic partial differential equation approach for Gaussian random fields, we also show how to formulate Gaussian process regression with linear constraints in a GMRF setting to reduce computational cost. This is illustrated in two applications with simulated data.
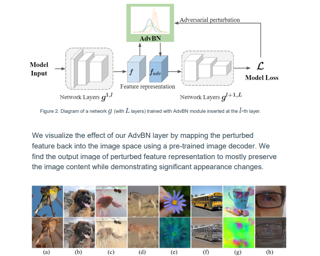
Adversarial training is the industry standard for producing models that are robust to small adversarial perturbations. However, machine learning practitioners need models that are robust to other kinds of changes that occur naturally, such as changes in the style or illumination of input images. Such changes in input distribution have been effectively modeled as shifts in the mean and variance of deep image features. We adapt adversarial training by directly perturbing feature statistics, rather than image pixels, to produce models that are robust to various unseen distributional shifts. We explore the relationship between these perturbations and distributional shifts by visualizing adversarial features. Our proposed method, Adversarial Batch Normalization (AdvBN), is a single network layer that generates worst-case feature perturbations during training. By fine-tuning neural networks on adversarial feature distributions, we observe improved robustness of networks to various unseen distributional shifts, including style variations and image corruptions. In addition, we show that our proposed adversarial feature perturbation can be complementary to existing image space data augmentation methods, leading to improved performance. The source code and pre-trained models are released at \url{https://github.com/azshue/AdvBN}.
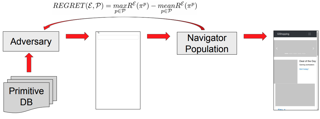
Many real-world problems are compositional – solving them requires completing interdependent sub-tasks, either in series or in parallel, that can be represented as a dependency graph. Deep reinforcement learning (RL) agents often struggle to learn such complex tasks due to the long time horizons and sparse rewards. To address this problem, we present Compositional Design of Environments (CoDE), which trains a Generator agent to automatically build a series of compositional tasks tailored to the RL agent’s current skill level. This automatic curriculum not only enables the agent to learn more complex tasks than it could have otherwise, but also selects tasks where the agent’s performance is weak, enhancing its robustness and ability to generalize zero-shot to unseen tasks at test-time. We analyze why current environment generation techniques are insufficient for the problem of generating compositional tasks, and propose a new algorithm that addresses these issues. Our results assess learning and generalization across multiple compositional tasks, including the real-world problem of learning to navigate and interact with web pages. We learn to generate environments composed of multiple pages or rooms, and train RL agents capable of completing wide-range of complex tasks in those environments. We contribute two new benchmark frameworks for …
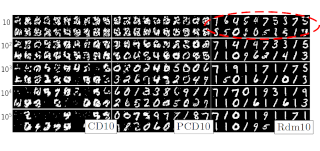
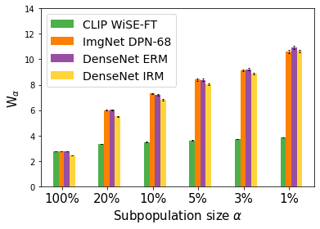
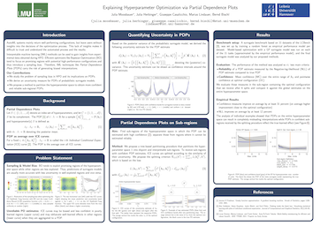
Automated hyperparameter optimization (HPO) can support practitioners to obtain peak performance in machine learning models.However, there is often a lack of valuable insights into the effects of different hyperparameters on the final model performance.This lack of explainability makes it difficult to trust and understand the automated HPO process and its results.We suggest using interpretable machine learning (IML) to gain insights from the experimental data obtained during HPO with Bayesian optimization (BO).BO tends to focus on promising regions with potential high-performance configurations and thus induces a sampling bias.Hence, many IML techniques, such as the partial dependence plot (PDP), carry the risk of generating biased interpretations.By leveraging the posterior uncertainty of the BO surrogate model, we introduce a variant of the PDP with estimated confidence bands.We propose to partition the hyperparameter space to obtain more confident and reliable PDPs in relevant sub-regions.In an experimental study, we provide quantitative evidence for the increased quality of the PDPs within sub-regions.
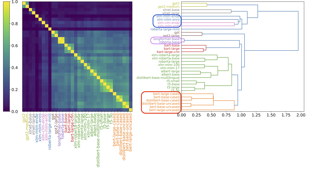
There are so many models in the literature that it is difficult for practitioners to decide which combinations are likely to be effective for a new task. This paper attempts to address this question by capturing relationships among checkpoints published on the web. We model the space of tasks as a Gaussian process. The covariance can be estimated from checkpoints and unlabeled probing data. With the Gaussian process, we can identify representative checkpoints by a maximum mutual information criterion. This objective is submodular. A greedy method identifies representatives that are likely to "cover'' the task space. These representatives generalize to new tasks with superior performance. Empirical evidence is provided for applications from both computational linguistics as well as computer vision.
Motivated by the consideration of fairly sharing the cost of exploration between multiple groups in learning problems, we develop the Nash bargaining solution in the context of multi-armed bandits. Specifically, the 'grouped' bandit associated with any multi-armed bandit problem associates, with each time step, a single group from some finite set of groups. The utility gained by a given group under some learning policy is naturally viewed as the reduction in that group's regret relative to the regret that group would have incurred 'on its own'. We derive policies that yield the Nash bargaining solution relative to the set of incremental utilities possible under any policy. We show that on the one hand, the 'price of fairness' under such policies is limited, while on the other hand, regret optimal policies are arbitrarily unfair under generic conditions. Our theoretical development is complemented by a case study on contextual bandits for warfarin dosing where we are concerned with the cost of exploration across multiple races and age groups.
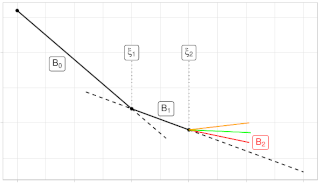
The Sliced-Wasserstein distance (SW) is being increasingly used in machine learning applications as an alternative to the Wasserstein distance and offers significant computational and statistical benefits. Since it is defined as an expectation over random projections, SW is commonly approximated by Monte Carlo. We adopt a new perspective to approximate SW by making use of the concentration of measure phenomenon: under mild assumptions, one-dimensional projections of a high-dimensional random vector are approximately Gaussian. Based on this observation, we develop a simple deterministic approximation for SW. Our method does not require sampling a number of random projections, and is therefore both accurate and easy to use compared to the usual Monte Carlo approximation. We derive nonasymptotical guarantees for our approach, and show that the approximation error goes to zero as the dimension increases, under a weak dependence condition on the data distribution. We validate our theoretical findings on synthetic datasets, and illustrate the proposed approximation on a generative modeling problem.
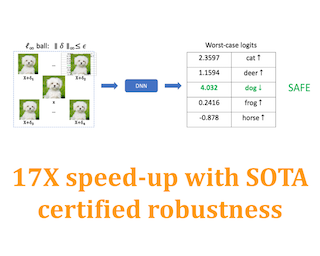

Novel view synthesis is a long-standing problem in machine learning and computer vision. Significant progress has recently been made in developing neural scene representations and rendering techniques that synthesize photorealistic images from arbitrary views. These representations, however, are extremely slow to train and often also slow to render. Inspired by neural variants of image-based rendering, we develop a new neural rendering approach with the goal of quickly learning a high-quality representation which can also be rendered in real-time. Our approach, MetaNLR++, accomplishes this by using a unique combination of a neural shape representation and 2D CNN-based image feature extraction, aggregation, and re-projection. To push representation convergence times down to minutes, we leverage meta learning to learn neural shape and image feature priors which accelerate training. The optimized shape and image features can then be extracted using traditional graphics techniques and rendered in real time. We show that MetaNLR++ achieves similar or better novel view synthesis results in a fraction of the time that competing methods require.
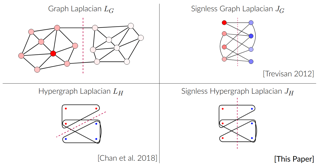
Hypergraphs are important objects to model ternary or higher-order relations of objects, and have a number of applications in analysing many complex datasets occurring in practice. In this work we study a new heat diffusion process in hypergraphs, and employ this process to design a polynomial-time algorithm that approximately finds bipartite components in a hypergraph. We theoretically prove the performance of our proposed algorithm, and compare it against the previous state-of-the-art through extensive experimental analysis on both synthetic and real-world datasets. We find that our new algorithm consistently and significantly outperforms the previous state-of-the-art across a wide range of hypergraphs.
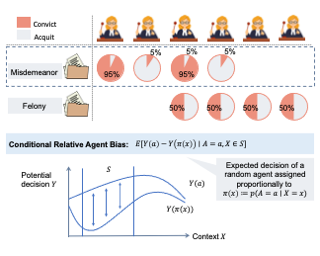
Individuals often make different decisions when faced with the same context, due to personal preferences and background. For instance, judges may vary in their leniency towards certain drug-related offenses, and doctors may vary in their preference for how to start treatment for certain types of patients. With these examples in mind, we present an algorithm for identifying types of contexts (e.g., types of cases or patients) with high inter-decision-maker disagreement. We formalize this as a causal inference problem, seeking a region where the assignment of decision-maker has a large causal effect on the decision. Our algorithm finds such a region by maximizing an empirical objective, and we give a generalization bound for its performance. In a semi-synthetic experiment, we show that our algorithm recovers the correct region of heterogeneity accurately compared to baselines. Finally, we apply our algorithm to real-world healthcare datasets, recovering variation that aligns with existing clinical knowledge.
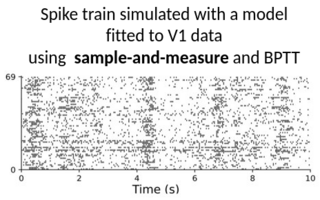
Fitting network models to neural activity is an important tool in neuroscience. A popular approach is to model a brain area with a probabilistic recurrent spiking network whose parameters maximize the likelihood of the recorded activity. Although this is widely used, we show that the resulting model does not produce realistic neural activity. To correct for this, we suggest to augment the log-likelihood with terms that measure the dissimilarity between simulated and recorded activity. This dissimilarity is defined via summary statistics commonly used in neuroscience and the optimization is efficient because it relies on back-propagation through the stochastically simulated spike trains. We analyze this method theoretically and show empirically that it generates more realistic activity statistics. We find that it improves upon other fitting algorithms for spiking network models like GLMs (Generalized Linear Models) which do not usually rely on back-propagation. This new fitting algorithm also enables the consideration of hidden neurons which is otherwise notoriously hard, and we show that it can be crucial when trying to infer the network connectivity from spike recordings.
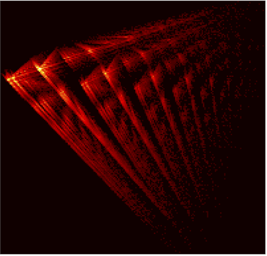
Understanding generalization in deep learning has been one of the major challenges in statistical learning theory over the last decade. While recent work has illustrated that the dataset and the training algorithm must be taken into account in order to obtain meaningful generalization bounds, it is still theoretically not clear which properties of the data and the algorithm determine the generalization performance. In this study, we approach this problem from a dynamical systems theory perspective and represent stochastic optimization algorithms as \emph{random iterated function systems} (IFS). Well studied in the dynamical systems literature, under mild assumptions, such IFSs can be shown to be ergodic with an invariant measure that is often supported on sets with a \emph{fractal structure}. As our main contribution, we prove that the generalization error of a stochastic optimization algorithm can be bounded based on the `complexity' of the fractal structure that underlies its invariant measure. Then, by leveraging results from dynamical systems theory, we show that the generalization error can be explicitly linked to the choice of the algorithm (e.g., stochastic gradient descent -- SGD), algorithm hyperparameters (e.g., step-size, batch-size), and the geometry of the problem (e.g., Hessian of the loss). We further specialize our results …

Random forests have been widely used for their ability to provide so-called importance measures, which give insight at a global (per dataset) level on the relevance of input variables to predict a certain output. On the other hand, methods based on Shapley values have been introduced to refine the analysis of feature relevance in tree-based models to a local (per instance) level. In this context, we first show that the global Mean Decrease of Impurity (MDI) variable importance scores correspond to Shapley values under some conditions. Then, we derive a local MDI importance measure of variable relevance, which has a very natural connection with the global MDI measure and can be related to a new notion of local feature relevance. We further link local MDI importances with Shapley values and discuss them in the light of related measures from the literature. The measures are illustrated through experiments on several classification and regression problems.
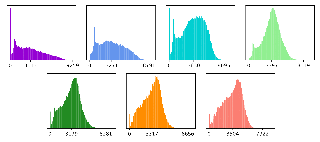
The stochastic multi-arm bandit problem has been extensively studied under standard assumptions on the arm's distribution (e.g bounded with known support, exponential family, etc). These assumptions are suitable for many real-world problems but sometimes they require knowledge (on tails for instance) that may not be precisely accessible to the practitioner, raising the question of the robustness of bandit algorithms to model misspecification. In this paper we study a generic \emph{Dirichlet Sampling} (DS) algorithm, based on pairwise comparisons of empirical indices computed with \textit{re-sampling} of the arms' observations and a data-dependent \textit{exploration bonus}. We show that different variants of this strategy achieve provably optimal regret guarantees when the distributions are bounded and logarithmic regret for semi-bounded distributions with a mild quantile condition. We also show that a simple tuning achieve robustness with respect to a large class of unbounded distributions, at the cost of slightly worse than logarithmic asymptotic regret. We finally provide numerical experiments showing the merits of DS in a decision-making problem on synthetic agriculture data.
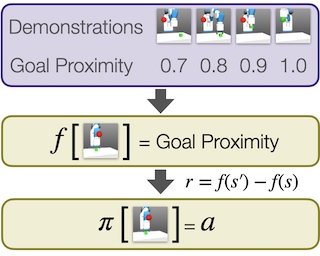
Task progress is intuitive and readily available task information that can guide an agent closer to the desired goal. Furthermore, a task progress estimator can generalize to new situations. From this intuition, we propose a simple yet effective imitation learning from observation method for a goal-directed task using a learned goal proximity function as a task progress estimator for better generalization to unseen states and goals. We obtain this goal proximity function from expert demonstrations and online agent experience, and then use the learned goal proximity as a dense reward for policy training. We demonstrate that our proposed method can robustly generalize compared to prior imitation learning methods on a set of goal-directed tasks in navigation, locomotion, and robotic manipulation, even with demonstrations that cover only a part of the states.
We derive a novel information-theoretic analysis of the generalization property of meta-learning algorithms. Concretely, our analysis proposes a generic understanding in both the conventional learning-to-learn framework \citep{amit2018meta} and the modern model-agnostic meta-learning (MAML) algorithms \citep{finn2017model}.Moreover, we provide a data-dependent generalization bound for the stochastic variant of MAML, which is \emph{non-vacuous} for deep few-shot learning. As compared to previous bounds that depend on the square norms of gradients, empirical validations on both simulated data and a well-known few-shot benchmark show that our bound is orders of magnitude tighter in most conditions.
We are motivated by the problem of providing strong generalization guarantees in the context of meta-learning. Existing generalization bounds are either challenging to evaluate or provide vacuous guarantees in even relatively simple settings. We derive a probably approximately correct (PAC) bound for gradient-based meta-learning using two different generalization frameworks in order to deal with the qualitatively different challenges of generalization at the "base" and "meta" levels. We employ bounds for uniformly stable algorithms at the base level and bounds from the PAC-Bayes framework at the meta level. The result of this approach is a novel PAC bound that is tighter when the base learner adapts quickly, which is precisely the goal of meta-learning. We show that our bound provides a tighter guarantee than other bounds on a toy non-convex problem on the unit sphere and a text-based classification example. We also present a practical regularization scheme motivated by the bound in settings where the bound is loose and demonstrate improved performance over baseline techniques.

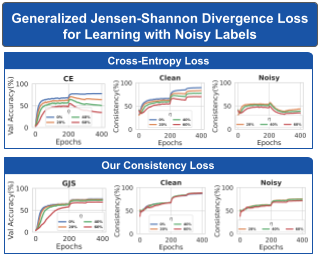
Prior works have found it beneficial to combine provably noise-robust loss functions e.g., mean absolute error (MAE) with standard categorical loss function e.g. cross entropy (CE) to improve their learnability. Here, we propose to use Jensen-Shannon divergence as a noise-robust loss function and show that it interestingly interpolate between CE and MAE with a controllable mixing parameter. Furthermore, we make a crucial observation that CE exhibit lower consistency around noisy data points. Based on this observation, we adopt a generalized version of the Jensen-Shannon divergence for multiple distributions to encourage consistency around data points. Using this loss function, we show state-of-the-art results on both synthetic (CIFAR), and real-world (e.g., WebVision) noise with varying noise rates.
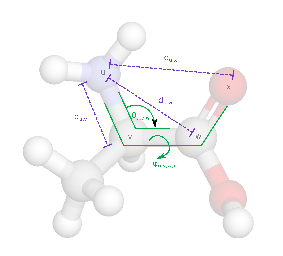
Prediction of a molecule’s 3D conformer ensemble from the molecular graph holds a key role in areas of cheminformatics and drug discovery. Existing generative models have several drawbacks including lack of modeling important molecular geometry elements (e.g., torsion angles), separate optimization stages prone to error accumulation, and the need for structure fine-tuning based on approximate classical force-fields or computationally expensive methods. We propose GEOMOL --- an end-to-end, non-autoregressive, and SE(3)-invariant machine learning approach to generate distributions of low-energy molecular 3D conformers. Leveraging the power of message passing neural networks (MPNNs) to capture local and global graph information, we predict local atomic 3D structures and torsion angles, avoid- ing unnecessary over-parameterization of the geometric degrees of freedom (e.g., one angle per non-terminal bond). Such local predictions suffice both for both the training loss computation and for the full deterministic conformer assembly (at test time). We devise a non-adversarial optimal transport based loss function to promote diverse conformer generation. GEOMOL predominantly outperforms popular open-source, commercial, or state-of-the-art machine learning (ML) models, while achieving significant speed-ups. We expect such differentiable 3D structure generators to significantly impact molecular modeling and related applications.
To perform well on unseen and potentially out-of-distribution samples, it is desirable for machine learning models to have a predictable response with respect to transformations affecting the factors of variation of the input. Here, we study the relative importance of several types of inductive biases towards such predictable behavior: the choice of data, their augmentations, and model architectures. Invariance is commonly achieved through hand-engineered data augmentation, but do standard data augmentations address transformations that explain variations in real data? While prior work has focused on synthetic data, we attempt here to characterize the factors of variation in a real dataset, ImageNet, and study the invariance of both standard residual networks and the recently proposed vision transformer with respect to changes in these factors. We show standard augmentation relies on a precise combination of translation and scale, with translation recapturing most of the performance improvement---despite the (approximate) translation invariance built in to convolutional architectures, such as residual networks. In fact, we found that scale and translation invariance was similar across residual networks and vision transformer models despite their markedly different architectural inductive biases. We show the training data itself is the main source of invariance, and that data augmentation only further …

Language is an interface to the outside world. In order for embodied agents to use it, language must be grounded in other, sensorimotor modalities. While there is an extended literature studying how machines can learn grounded language, the topic of how to learn spatio-temporal linguistic concepts is still largely uncharted. To make progress in this direction, we here introduce a novel spatio-temporal language grounding task where the goal is to learn the meaning of spatio-temporal descriptions of behavioral traces of an embodied agent. This is achieved by training a truth function that predicts if a description matches a given history of observations. The descriptions involve time-extended predicates in past and present tense as well as spatio-temporal references to objects in the scene. To study the role of architectural biases in this task, we train several models including multimodal Transformer architectures; the latter implement different attention computations between words and objects across space and time. We test models on two classes of generalization: 1) generalization to new sentences, 2) generalization to grammar primitives. We observe that maintaining object identity in the attention computation of our Transformers is instrumental to achieving good performance on generalization overall, and that summarizing object traces in …
Despite the significant interests and many progresses in decentralized multi-player multi-armed bandits (MP-MAB) problems in recent years, the regret gap to the natural centralized lower bound in the heterogeneous MP-MAB setting remains open. In this paper, we propose BEACON -- Batched Exploration with Adaptive COmmunicatioN -- that closes this gap. BEACON accomplishes this goal with novel contributions in implicit communication and efficient exploration. For the former, we propose a novel adaptive differential communication (ADC) design that significantly improves the implicit communication efficiency. For the latter, a carefully crafted batched exploration scheme is developed to enable incorporation of the combinatorial upper confidence bound (CUCB) principle. We then generalize the existing linear-reward MP-MAB problems, where the system reward is always the sum of individually collected rewards, to a new MP-MAB problem where the system reward is a general (nonlinear) function of individual rewards. We extend BEACON to solve this problem and prove a logarithmic regret. BEACON bridges the algorithm design and regret analysis of combinatorial MAB (CMAB) and MP-MAB, two largely disjointed areas in MAB, and the results in this paper suggest that this previously ignored connection is worth further investigation.
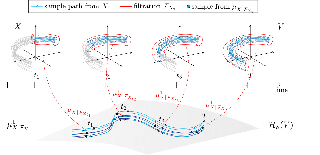
Stochastic processes are random variables with values in some space of paths. However, reducing a stochastic process to a path-valued random variable ignores its filtration, i.e. the flow of information carried by the process through time. By conditioning the process on its filtration, we introduce a family of higher order kernel mean embeddings (KMEs) that generalizes the notion of KME to capture additional information related to the filtration. We derive empirical estimators for the associated higher order maximum mean discrepancies (MMDs) and prove consistency. We then construct a filtration-sensitive kernel two-sample test able to capture information that gets missed by the standard MMD test. In addition, leveraging our higher order MMDs we construct a family of universal kernels on stochastic processes that allows to solve real-world calibration and optimal stopping problems in quantitative finance (such as the pricing of American options) via classical kernel-based regression methods. Finally, adapting existing tests for conditional independence to the case of stochastic processes, we design a causal-discovery algorithm to recover the causal graph of structural dependencies among interacting bodies solely from observations of their multidimensional trajectories.
One of the primary purposes of video is to capture people and their unique activities. It is often the case that the experience of watching the video can be enhanced by adding a musical soundtrack that is in-sync with the rhythmic features of these activities. How would this soundtrack sound? Such a problem is challenging since little is known about capturing the rhythmic nature of free body movements. In this work, we explore this problem and propose a novel system, called `RhythmicNet', which takes as an input a video which includes human movements and generates a soundtrack for it. RhythmicNet works directly with human movements by extracting skeleton keypoints and implements a sequence of models which translate the keypoints to rhythmic sounds.RhythmicNet follows the natural process of music improvisation which includes the prescription of streams of the beat, the rhythm and the melody. In particular, RhythmicNet first infers the music beat and the style pattern from body keypoints per each frame to produce rhythm. Next, it implements a transformer-based model to generate the hits of drum instruments and implements a U-net based model to generate the velocity and the offsets of the instruments. Additional types of instruments are added to …
This study aims to develop bandit algorithms that automatically exploit tendencies of certain environments to improve performance, without any prior knowledge regarding the environments. We first propose an algorithm for combinatorial semi-bandits with a hybrid regret bound that includes two main features: a best-of-three-worlds guarantee and multiple data-dependent regret bounds. The former means that the algorithm will work nearly optimally in all environments in an adversarial setting, a stochastic setting, or a stochastic setting with adversarial corruptions. The latter implies that, even if the environment is far from exhibiting stochastic behavior, the algorithm will perform better as long as the environment is "easy" in terms of certain metrics. The metrics w.r.t. the easiness referred to in this paper include cumulative loss for optimal actions, total quadratic variation of losses, and path-length of a loss sequence. We also show hybrid data-dependent regret bounds for adversarial linear bandits, which include a first path-length regret bound that is tight up to logarithmic factors.
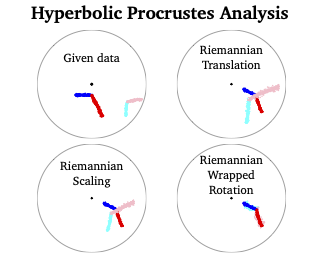
Label-free alignment between datasets collected at different times, locations, or by different instruments is a fundamental scientific task. Hyperbolic spaces have recently provided a fruitful foundation for the development of informative representations of hierarchical data. Here, we take a purely geometric approach for label-free alignment of hierarchical datasets and introduce hyperbolic Procrustes analysis (HPA). HPA consists of new implementations of the three prototypical Procrustes analysis components: translation, scaling, and rotation, based on the Riemannian geometry of the Lorentz model of hyperbolic space. We analyze the proposed components, highlighting their useful properties for alignment. The efficacy of HPA, its theoretical properties, stability and computational efficiency are demonstrated in simulations. In addition, we showcase its performance on three batch correction tasks involving gene expression and mass cytometry data. Specifically, we demonstrate high-quality unsupervised batch effect removal from data acquired at different sites and with different technologies that outperforms recent methods for label-free alignment in hyperbolic spaces.
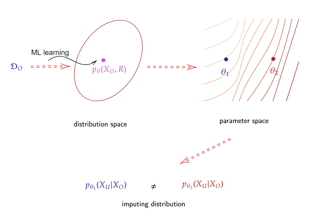
Real-world datasets often have missing values associated with complex generative processes, where the cause of the missingness may not be fully observed. This is known as missing not at random (MNAR) data. However, many imputation methods do not take into account the missingness mechanism, resulting in biased imputation values when MNAR data is present. Although there are a few methods that have considered the MNAR scenario, their model's identifiability under MNAR is generally not guaranteed. That is, model parameters can not be uniquely determined even with infinite data samples, hence the imputation results given by such models can still be biased. This issue is especially overlooked by many modern deep generative models. In this work, we fill in this gap by systematically analyzing the identifiability of generative models under MNAR. Furthermore, we propose a practical deep generative model which can provide identifiability guarantees under mild assumptions, for a wide range of MNAR mechanisms. Our method demonstrates a clear advantage for tasks on both synthetic data and multiple real-world scenarios with MNAR data.
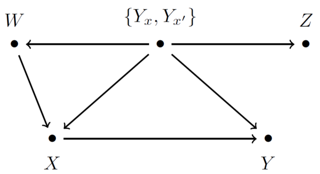
The joint probabilities of potential outcomes are fundamental components of causal inference in the sense that (i) if they are identifiable, then the causal risk is also identifiable, but not vise versa (Pearl, 2009; Tian and Pearl, 2000) and (ii) they enable us to evaluate the probabilistic aspects of necessity'',sufficiency'', and ``necessity and sufficiency'', which are important concepts of successful explanation (Watson, et al., 2020). However, because they are not identifiable without any assumptions, various assumptions have been utilized to evaluate the joint probabilities of potential outcomes, e.g., the assumption of monotonicity (Pearl, 2009; Tian and Pearl, 2000), the independence between potential outcomes (Robins and Richardson, 2011), the condition of gain equality (Li and Pearl, 2019), and the specific functional relationships between cause and effect (Pearl, 2009). Unlike existing identification conditions, in order to evaluate the joint probabilities of potential outcomes without such assumptions, this paper proposes two types of novel identification conditions using covariate information. In addition, when the joint probabilities of potential outcomes are identifiable through the proposed conditions, the estimation problem of the joint probabilities of potential outcomes reduces to that of singular models and thus they can not be evaluated by standard statistical estimation methods. …
In causal discovery, linear non-Gaussian acyclic models (LiNGAMs) have been studied extensively. While the causally sufficient case is well understood, in many real problems the observed variables are not causally related. Rather, they are generated by latent variables, such as confounders and mediators, which may themselves be causally related. Existing results on the identification of the causal structure among the latent variables often require very strong graphical assumptions. In this paper, we consider partially observed linear models with either non-Gaussian or heterogeneous errors. In that case we give two graphical conditions which are necessary for identification of the causal structure. These conditions are closely related to sparsity of the causal edges. Together with one additional condition on the coefficients, which holds generically for any graph, the two graphical conditions are also sufficient for identifiability. These new conditions can be satisfied even when there is a large number of latent variables. We demonstrate the validity of our results on synthetic data.
Deep learning systems frequently fail at out-of-context (OOC) prediction, the problem of making reliable predictions on uncommon or unusual inputs or subgroups of the training distribution. To this end, a number of benchmarks for measuring OOC performance have been recently introduced. In this work, we introduce a framework unifying the literature on OOC performance measurement, and demonstrate how rich auxiliary information can be leveraged to identify candidate sets of OOC examples in existing datasets. We present NOOCh: a suite of naturally-occurring "challenge sets", and show how varying notions of context can be used to probe specific OOC failure modes. Experimentally, we explore the tradeoffs between various learning approaches on these challenge sets and demonstrate how the choices made in designing OOC benchmarks can yield varying conclusions.
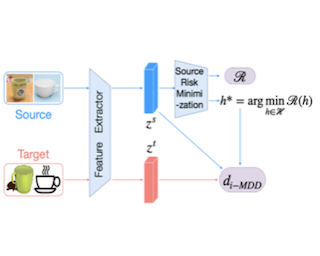
Probability discrepancy measure is a fundamental construct for numerous machine learning models such as weakly supervised learning and generative modeling. However, most measures overlook the fact that the distributions are not the end-product of learning, but are the basis of downstream predictor. Therefore it is important to warp the probability discrepancy measure towards the end tasks, and we hence propose a new bi-level optimization based approach so that the two distributions are compared not uniformly against the entire hypothesis space, but only with respect to the optimal predictor for the downstream end task. When applied to margin disparity discrepancy and contrastive domain discrepancy, our method significantly improves the performance in unsupervised domain adaptation, and enjoys a much more principled training process.
Understanding how the brain constructs statistical models of the sensory world remains a longstanding challenge for computational neuroscience. Here, we derive an unsupervised local synaptic plasticity rule that trains neural circuits to infer latent structure from sensory stimuli via a novel loss function for approximate online Bayesian inference. The learning algorithm is driven by a local error signal computed between two factors that jointly contribute to neural activity: stimulus drive and internal predictions --- the network's 'impression' of the stimulus. Physiologically, we associate these two components with the basal and apical dendrites of pyramidal neurons, respectively. We show that learning can be implemented online, is capable of capturing temporal dependencies in continuous input streams, and generalizes to hierarchical architectures. Furthermore, we demonstrate both analytically and empirically that the algorithm is more data-efficient than a three-factor plasticity alternative, enabling it to learn statistics of high-dimensional, naturalistic inputs. Overall, the model provides a bridge from mechanistic accounts of synaptic plasticity to algorithmic descriptions of unsupervised probabilistic learning and inference.
We consider a stochastic multi-armed bandit problem specified by a set of one-dimensional family exponential distributions endowed with a unimodal structure. The unimodal structure is of practical relevance for several applications. We introduce IMED-UB, an algorithm that exploits provably optimally the unimodal-structure, by adapting to this setting the Indexed Minimum Empirical Divergence (IMED) algorithm introduced by Honda and Takemura (2015). Owing to our proof technique, we are able to provide a concise finite-time analysis of the IMED-UB algorithm, that is simple and yet yields asymptotic optimality. We finally provide numerical experiments showing that IMED-UB competes favorably with the recently introduced state-of-the-art algorithms.
Various graph contrastive learning models have been proposed to improve the performance of tasks on graph datasets in recent years. While effective and prevalent, these models are usually carefully customized. In particular, despite all recent work create two contrastive views, they differ in a variety of view augmentations, architectures, and objectives. It remains an open question how to build your graph contrastive learning model from scratch for particular graph tasks and datasets. In this work, we aim to fill this gap by studying how graph information is transformed and transferred during the contrastive learning process, and proposing an information-aware graph contrastive learning framework called InfoGCL. The key to the success of the proposed framework is to follow the Information Bottleneck principle to reduce the mutual information between contrastive parts while keeping task-relevant information intact at both the levels of the individual module and the entire framework so that the information loss during graph representation learning can be minimized. We show for the first time that all recent graph contrastive learning methods can be unified by our framework. Based on theoretical and empirical analysis on benchmark graph datasets, we show that InfoGCL achieves state-of-the-art performance in the settings of both graph …
Stochastic sparse linear bandits offer a practical model for high-dimensional online decision-making problems and have a rich information-regret structure. In this work we explore the use of information-directed sampling (IDS), which naturally balances the information-regret trade-off. We develop a class of information-theoretic Bayesian regret bounds that nearly match existing lower bounds on a variety of problem instances, demonstrating the adaptivity of IDS. To efficiently implement sparse IDS, we propose an empirical Bayesian approach for sparse posterior sampling using a spike-and-slab Gaussian-Laplace prior. Numerical results demonstrate significant regret reductions by sparse IDS relative to several baselines.
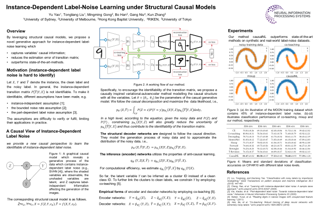
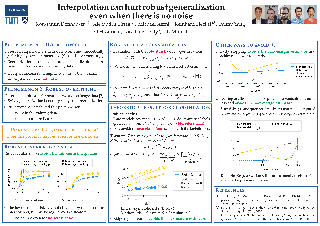
Numerous recent works show that overparameterization implicitly reduces variance for min-norm interpolators and max-margin classifiers. These findings suggest that ridge regularization has vanishing benefits in high dimensions. We challenge this narrative by showing that, even in the absence of noise, avoiding interpolation through ridge regularization can significantly improve generalization. We prove this phenomenon for the robust risk of both linear regression and classification, and hence provide the first theoretical result on \emph{robust overfitting}.
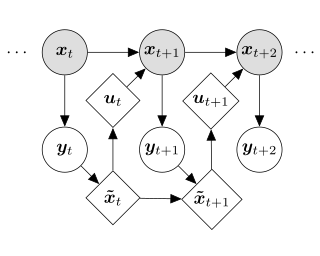
Computational level explanations based on optimal feedback control with signal-dependent noise have been able to account for a vast array of phenomena in human sensorimotor behavior. However, commonly a cost function needs to be assumed for a task and the optimality of human behavior is evaluated by comparing observed and predicted trajectories. Here, we introduce inverse optimal control with signal-dependent noise, which allows inferring the cost function from observed behavior. To do so, we formalize the problem as a partially observable Markov decision process and distinguish between the agent’s and the experimenter’s inference problems. Specifically, we derive a probabilistic formulation of the evolution of states and belief states and an approximation to the propagation equation in the linear-quadratic Gaussian problem with signal-dependent noise. We extend the model to the case of partial observability of state variables from the point of view of the experimenter. We show the feasibility of the approach through validation on synthetic data and application to experimental data. Our approach enables recovering the costs and benefits implicit in human sequential sensorimotor behavior, thereby reconciling normative and descriptive approaches in a computational framework.
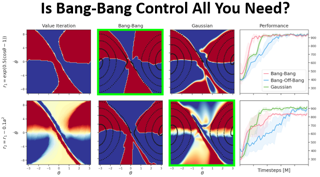
Reinforcement learning (RL) for continuous control typically employs distributions whose support covers the entire action space. In this work, we investigate the colloquially known phenomenon that trained agents often prefer actions at the boundaries of that space. We draw theoretical connections to the emergence of bang-bang behavior in optimal control, and provide extensive empirical evaluation across a variety of recent RL algorithms. We replace the normal Gaussian by a Bernoulli distribution that solely considers the extremes along each action dimension - a bang-bang controller. Surprisingly, this achieves state-of-the-art performance on several continuous control benchmarks - in contrast to robotic hardware, where energy and maintenance cost affect controller choices. Since exploration, learning, and the final solution are entangled in RL, we provide additional imitation learning experiments to reduce the impact of exploration on our analysis. Finally, we show that our observations generalize to environments that aim to model real-world challenges and evaluate factors to mitigate the emergence of bang-bang solutions. Our findings emphasise challenges for benchmarking continuous control algorithms, particularly in light of potential real-world applications.
Policy networks are a central feature of deep reinforcement learning (RL) algorithms for continuous control, enabling the estimation and sampling of high-value actions. From the variational inference perspective on RL, policy networks, when used with entropy or KL regularization, are a form of amortized optimization, optimizing network parameters rather than the policy distributions directly. However, direct amortized mappings can yield suboptimal policy estimates and restricted distributions, limiting performance and exploration. Given this perspective, we consider the more flexible class of iterative amortized optimizers. We demonstrate that the resulting technique, iterative amortized policy optimization, yields performance improvements over direct amortization on benchmark continuous control tasks.
Estimating the probabilities of connections between vertices in a random network using an observed adjacency matrix is an important task for network data analysis. Many existing estimation methods are based on certain assumptions on network structure, which limit their applicability in practice. Without making strong assumptions, we develop an iterative connecting probability estimation method based on neighborhood averaging. Starting at a random initial point or an existing estimate, our method iteratively updates the pairwise vertex distances, the sets of similar vertices, and connecting probabilities to improve the precision of the estimate. We propose a two-stage neighborhood selection procedure to achieve the trade-off between smoothness of the estimate and the ability to discover local structure. The tuning parameters can be selected by cross-validation. We establish desirable theoretical properties for our method, and further justify its superior performance by comparing with existing methods in simulation and real data analysis.
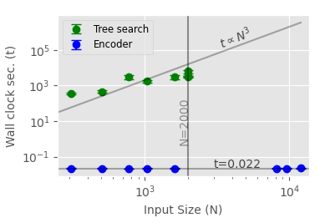
Kernel selection plays a central role in determining the performance of Gaussian Process (GP) models, as the chosen kernel determines both the inductive biases and prior support of functions under the GP prior. This work addresses the challenge of constructing custom kernel functions for high-dimensional GP regression models. Drawing inspiration from recent progress in deep learning, we introduce a novel approach named KITT: Kernel Identification Through Transformers. KITT exploits a transformer-based architecture to generate kernel recommendations in under 0.1 seconds, which is several orders of magnitude faster than conventional kernel search algorithms. We train our model using synthetic data generated from priors over a vocabulary of known kernels. By exploiting the nature of the self-attention mechanism, KITT is able to process datasets with inputs of arbitrary dimension. We demonstrate that kernels chosen by KITT yield strong performance over a diverse collection of regression benchmarks.
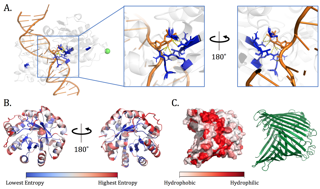
Modeling the effect of sequence variation on function is a fundamental problem for understanding and designing proteins. Since evolution encodes information about function into patterns in protein sequences, unsupervised models of variant effects can be learned from sequence data. The approach to date has been to fit a model to a family of related sequences. The conventional setting is limited, since a new model must be trained for each prediction task. We show that using only zero-shot inference, without any supervision from experimental data or additional training, protein language models capture the functional effects of sequence variation, performing at state-of-the-art.

Random Fourier features provide a way to tackle large-scale machine learning problems with kernel methods. Their slow Monte Carlo convergence rate has motivated the research of deterministic Fourier features whose approximation error can decrease exponentially in the number of basis functions. However, due to their tensor product extension to multiple dimensions, these methods suffer heavily from the curse of dimensionality, limiting their applicability to one, two or three-dimensional scenarios. In our approach we overcome said curse of dimensionality by exploiting the tensor product structure of deterministic Fourier features, which enables us to represent the model parameters as a low-rank tensor decomposition. We derive a monotonically converging block coordinate descent algorithm with linear complexity in both the sample size and the dimensionality of the inputs for a regularized squared loss function, allowing to learn a parsimonious model in decomposed form using deterministic Fourier features.We demonstrate by means of numerical experiments how our low-rank tensor approach obtains the same performance of the corresponding nonparametric model, consistently outperforming random Fourier features.
Image classification models tend to make decisions based on peripheral attributes of data items that have strong correlation with a target variable (i.e., dataset bias). These biased models suffer from the poor generalization capability when evaluated on unbiased datasets. Existing approaches for debiasing often identify and emphasize those samples with no such correlation (i.e., bias-conflicting) without defining the bias type in advance. However, such bias-conflicting samples are significantly scarce in biased datasets, limiting the debiasing capability of these approaches. This paper first presents an empirical analysis revealing that training with "diverse" bias-conflicting samples beyond a given training set is crucial for debiasing as well as the generalization capability. Based on this observation, we propose a novel feature-level data augmentation technique in order to synthesize diverse bias-conflicting samples. To this end, our method learns the disentangled representation of (1) the intrinsic attributes (i.e., those inherently defining a certain class) and (2) bias attributes (i.e., peripheral attributes causing the bias), from a large number of bias-aligned samples, the bias attributes of which have strong correlation with the target variable. Using the disentangled representation, we synthesize bias-conflicting samples that contain the diverse intrinsic attributes of bias-aligned samples by swapping their latent features. By …

To understand the relationship between behavior and neural activity, experiments in neuroscience often include an animal performing a repeated behavior such as a motor task. Recent progress in computer vision and deep learning has shown great potential in the automated analysis of behavior by leveraging large and high-quality video datasets. In this paper, we design Disentangled Behavior Embedding (DBE) to learn robust behavioral embeddings from unlabeled, multi-view, high-resolution behavioral videos across different animals and multiple sessions. We further combine DBE with a stochastic temporal model to propose Variational Disentangled Behavior Embedding (VDBE), an end-to-end approach that learns meaningful discrete behavior representations and generates interpretable behavioral videos. Our models learn consistent behavior representations by explicitly disentangling the dynamic behavioral factors (pose) from time-invariant, non-behavioral nuisance factors (context) in a deep autoencoder, and exploit the temporal structures of pose dynamics. Compared to competing approaches, DBE and VDBE enjoy superior performance on downstream tasks such as fine-grained behavioral motif generation and behavior decoding.
Large-scale, two-sided matching platforms must find market outcomes that align with user preferences while simultaneously learning these preferences from data. But since preferences are inherently uncertain during learning, the classical notion of stability (Gale and Shapley, 1962; Shapley and Shubik, 1971) is unattainable in these settings. To bridge this gap, we develop a framework and algorithms for learning stable market outcomes under uncertainty. Our primary setting is matching with transferable utilities, where the platform both matches agents and sets monetary transfers between them. We design an incentive-aware learning objective that captures the distance of a market outcome from equilibrium. Using this objective, we analyze the complexity of learning as a function of preference structure, casting learning as a stochastic multi-armed bandit problem. Algorithmically, we show that "optimism in the face of uncertainty," the principle underlying many bandit algorithms, applies to a primal-dual formulation of matching with transfers and leads to near-optimal regret bounds. Our work takes a first step toward elucidating when and how stable matchings arise in large, data-driven marketplaces.
To perform counterfactual reasoning in Structural Causal Models (SCMs), one needs to know the causal mechanisms, which provide factorizations of conditional distributions into noise sources and deterministic functions mapping realizations of noise to samples. Unfortunately, the causal mechanism is not uniquely identified by data that can be gathered by observing and interacting with the world, so there remains the question of how to choose causal mechanisms. In recent work, Oberst & Sontag (2019) propose Gumbel-max SCMs, which use Gumbel-max reparameterizations as the causal mechanism due to an appealing counterfactual stability property. However, the justification requires appealing to intuition. In this work, we instead argue for choosing a causal mechanism that is best under a quantitative criteria such as minimizing variance when estimating counterfactual treatment effects. We propose a parameterized family of causal mechanisms that generalize Gumbel-max. We show that they can be trained to minimize counterfactual effect variance and other losses on a distribution of queries of interest, yielding lower variance estimates of counterfactual treatment effect than fixed alternatives, also generalizing to queries not seen at training time.
Vision transformer networks have shown superiority in many computer vision tasks. In this paper, we take a step further by proposing a novel generative vision transformer with latent variables following an informative energy-based prior for salient object detection. Both the vision transformer network and the energy-based prior model are jointly trained via Markov chain Monte Carlo-based maximum likelihood estimation, in which the sampling from the intractable posterior and prior distributions of the latent variables are performed by Langevin dynamics. Further, with the generative vision transformer, we can easily obtain a pixel-wise uncertainty map from an image, which indicates the model confidence in predicting saliency from the image. Different from the existing generative models which define the prior distribution of the latent variables as a simple isotropic Gaussian distribution, our model uses an energy-based informative prior which can be more expressive to capture the latent space of the data. We apply the proposed framework to both RGB and RGB-D salient object detection tasks. Extensive experimental results show that our framework can achieve not only accurate saliency predictions but also meaningful uncertainty maps that are consistent with the human perception.
Cellular automata (CA) are a class of computational models that exhibit rich dynamics emerging from the local interaction of cells arranged in a regular lattice. In this work we focus on a generalised version of typical CA, called graph cellular automata (GCA), in which the lattice structure is replaced by an arbitrary graph. In particular, we extend previous work that used convolutional neural networks to learn the transition rule of conventional CA and we use graph neural networks to learn a variety of transition rules for GCA. First, we present a general-purpose architecture for learning GCA, and we show that it can represent any arbitrary GCA with finite and discrete state space. Then, we test our approach on three different tasks: 1) learning the transition rule of a GCA on a Voronoi tessellation; 2) imitating the behaviour of a group of flocking agents; 3) learning a rule that converges to a desired target state.
In the predict-then-optimize framework, the objective is to train a predictive model, mapping from environment features to parameters of an optimization problem, which maximizes decision quality when the optimization is subsequently solved. Recent work on decision-focused learning shows that embedding the optimization problem in the training pipeline can improve decision quality and help generalize better to unseen tasks compared to relying on an intermediate loss function for evaluating prediction quality. We study the predict-then-optimize framework in the context of sequential decision problems (formulated as MDPs) that are solved via reinforcement learning. In particular, we are given environment features and a set of trajectories from training MDPs, which we use to train a predictive model that generalizes to unseen test MDPs without trajectories. Two significant computational challenges arise in applying decision-focused learning to MDPs: (i) large state and action spaces make it infeasible for existing techniques to differentiate through MDP problems, and (ii) the high-dimensional policy space, as parameterized by a neural network, makes differentiating through a policy expensive. We resolve the first challenge by sampling provably unbiased derivatives to approximate and differentiate through optimality conditions, and the second challenge by using a low-rank approximation to the high-dimensional sample-based derivatives. We …
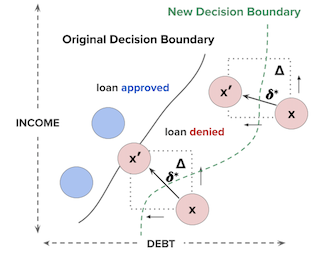
As machine learning models are increasingly deployed in high-stakes domains such as legal and financial decision-making, there has been growing interest in post-hoc methods for generating counterfactual explanations. Such explanations provide individuals adversely impacted by predicted outcomes (e.g., an applicant denied a loan) with recourse---i.e., a description of how they can change their features to obtain a positive outcome. We propose a novel algorithm that leverages adversarial training and PAC confidence sets to learn models that theoretically guarantee recourse to affected individuals with high probability without sacrificing accuracy. We demonstrate the efficacy of our approach via extensive experiments on real data.
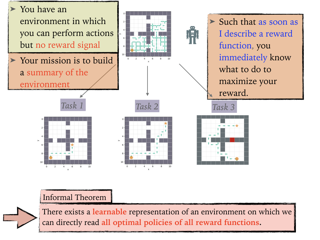
We introduce the forward-backward (FB) representation of the dynamics of a reward-free Markov decision process. It provides explicit near-optimal policies for any reward specified a posteriori. During an unsupervised phase, we use reward-free interactions with the environment to learn two representations via off-the-shelf deep learning methods and temporal difference (TD) learning. In the test phase, a reward representation is estimated either from reward observations or an explicit reward description (e.g., a target state). The optimal policy for thatreward is directly obtained from these representations, with no planning. We assume access to an exploration scheme or replay buffer for the first phase.The corresponding unsupervised loss is well-principled: if training is perfect, the policies obtained are provably optimal for any reward function. With imperfect training, the sub-optimality is proportional to the unsupervised approximation error. The FB representation learns long-range relationships between states and actions, via a predictive occupancy map, without having to synthesize states as in model-based approaches.This is a step towards learning controllable agents in arbitrary black-box stochastic environments. This approach compares well to goal-oriented RL algorithms on discrete and continuous mazes, pixel-based MsPacman, and the FetchReach virtual robot arm. We also illustrate how the agent can immediately adapt to new …
Multi-site fMRI studies face the challenge that the pooling introduces systematic non-biological site-specific variance due to hardware, software, and environment. In this paper, we propose to reduce site-specific variance in the estimation of hierarchical Sparsity Connectivity Patterns (hSCPs) in fMRI data via a simple yet effective matrix factorization while preserving biologically relevant variations. Our method leverages unsupervised adversarial learning to improve the reproducibility of the components. Experiments on simulated datasets display that the proposed method can estimate components with higher accuracy and reproducibility, while preserving age-related variation on a multi-center clinical data set.

Recurrent neural networks (RNNs) are popular tools for studying computational dynamics in neurobiological circuits. However, due to the dizzying array of design choices, it is unclear if computational dynamics unearthed from RNNs provide reliable neurobiological inferences. Understanding the effects of design choices on RNN computation is valuable in two ways. First, invariant properties that persist in RNNs across a wide range of design choices are more likely to be candidate neurobiological mechanisms. Second, understanding what design choices lead to similar dynamical solutions reduces the burden of imposing that all design choices be totally faithful replications of biology. We focus our investigation on how RNN learning rule and task design affect RNN computation. We trained large populations of RNNs with different, but commonly used, learning rules on decision-making tasks inspired by neuroscience literature. For relatively complex tasks, we find that attractor topology is invariant to the choice of learning rule, but representational geometry is not. For simple tasks, we find that attractor topology depends on task input noise. However, when a task becomes increasingly complex, RNN attractor topology becomes invariant to input noise. Together, our results suggest that RNN dynamics are robust across learning rules but can be sensitive to the …
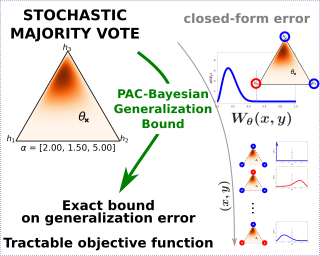
We investigate a stochastic counterpart of majority votes over finite ensembles of classifiers, and study its generalization properties. While our approach holds for arbitrary distributions, we instantiate it with Dirichlet distributions: this allows for a closed-form and differentiable expression for the expected risk, which then turns the generalization bound into a tractable training objective.The resulting stochastic majority vote learning algorithm achieves state-of-the-art accuracy and benefits from (non-vacuous) tight generalization bounds, in a series of numerical experiments when compared to competing algorithms which also minimize PAC-Bayes objectives -- both with uninformed (data-independent) and informed (data-dependent) priors.
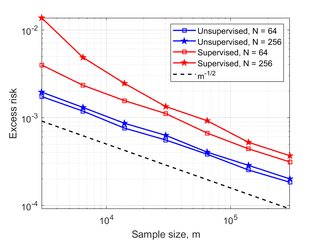
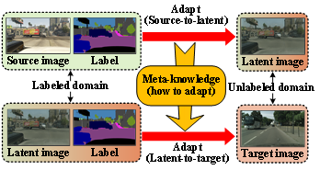
Domain adaptive semantic segmentation aims to transfer knowledge learned from labeled source domain to unlabeled target domain. To narrow down the domain gap and ease adaptation difficulty, some recent methods translate source images to target-like images (latent domains), which are used as supplement or substitute to the original source data. Nevertheless, these methods neglect to explicitly model the relationship of knowledge transferring across different domains. Alternatively, in this work we break through the standard “source-target” one pair adaptation framework and construct multiple adaptation pairs (e.g. “source-latent” and “latent-target”). The purpose is to use the meta-knowledge (how to adapt) learned from one pair as guidance to assist the adaptation of another pair under a meta-learning framework. Furthermore, we extend our method to a more practical setting of open compound domain adaptation (a.k.a multiple-target domain adaptation), where the target is a compound of multiple domains without domain labels. In this setting, we embed an additional pair of “latent-latent” to reduce the domain gap between the source and different latent domains, allowing the model to adapt well on multiple target domains simultaneously. When evaluated on standard benchmarks, our method is superior to the state-of-the-art methods in both the single target and multiple-target domain …
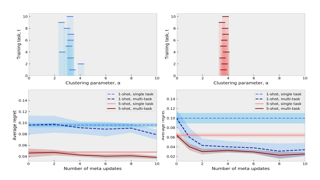
We analyze the meta-learning of the initialization and step-size of learning algorithms for piecewise-Lipschitz functions, a non-convex setting with applications to both machine learning and algorithms. Starting from recent regret bounds for the exponential forecaster on losses with dispersed discontinuities, we generalize them to be initialization-dependent and then use this result to propose a practical meta-learning procedure that learns both the initialization and the step-size of the algorithm from multiple online learning tasks. Asymptotically, we guarantee that the average regret across tasks scales with a natural notion of task-similarity that measures the amount of overlap between near-optimal regions of different tasks. Finally, we instantiate the method and its guarantee in two important settings: robust meta-learning and multi-task data-driven algorithm design.
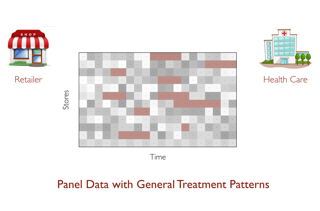
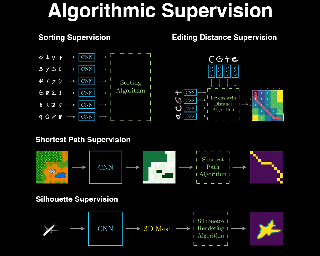
The integration of algorithmic components into neural architectures has gained increased attention recently, as it allows training neural networks with new forms of supervision such as ordering constraints or silhouettes instead of using ground truth labels. Many approaches in the field focus on the continuous relaxation of a specific task and show promising results in this context. But the focus on single tasks also limits the applicability of the proposed concepts to a narrow range of applications. In this work, we build on those ideas to propose an approach that allows to integrate algorithms into end-to-end trainable neural network architectures based on a general approximation of discrete conditions. To this end, we relax these conditions in control structures such as conditional statements, loops, and indexing, so that resulting algorithms are smoothly differentiable. To obtain meaningful gradients, each relevant variable is perturbed via logistic distributions and the expectation value under this perturbation is approximated. We evaluate the proposed continuous relaxation model on four challenging tasks and show that it can keep up with relaxations specifically designed for each individual task.
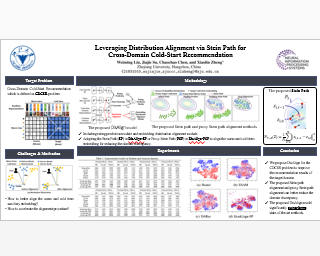
Cross-Domain Recommendation (CDR) has been popularly studied to utilize different domain knowledge to solve the cold-start problem in recommender systems. In this paper, we focus on the Cross-Domain Cold-Start Recommendation (CDCSR) problem. That is, how to leverage the information from a source domain, where items are 'warm', to improve the recommendation performance of a target domain, where items are 'cold'. Unfortunately, previous approaches on cold-start and CDR cannot reduce the latent embedding discrepancy across domains efficiently and lead to model degradation. To address this issue, we propose DisAlign, a cross-domain recommendation framework for the CDCSR problem, which utilizes both rating and auxiliary representations from the source domain to improve the recommendation performance of the target domain. Specifically, we first propose Stein path alignment for aligning the latent embedding distributions across domains, and then further propose its improved version, i.e., proxy Stein path, which can reduce the operation consumption and improve efficiency. Our empirical study on Douban and Amazon datasets demonstrate that DisAlign significantly outperforms the state-of-the-art models under the CDCSR setting.
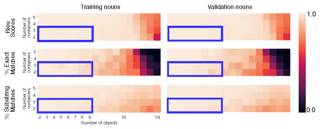
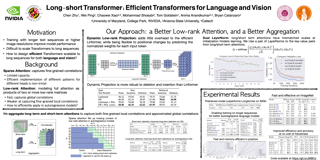
Transformers have achieved success in both language and vision domains. However, it is prohibitively expensive to scale them to long sequences such as long documents or high-resolution images, because self-attention mechanism has quadratic time and memory complexities with respect to the input sequence length. In this paper, we propose Long-Short Transformer (Transformer-LS), an efficient self-attention mechanism for modeling long sequences with linear complexity for both language and vision tasks. It aggregates a novel long-range attention with dynamic projection to model distant correlations and a short-term attention to capture fine-grained local correlations. We propose a dual normalization strategy to account for the scale mismatch between the two attention mechanisms. Transformer-LS can be applied to both autoregressive and bidirectional models without additional complexity. Our method outperforms the state-of-the-art models on multiple tasks in language and vision domains, including the Long Range Arena benchmark, autoregressive language modeling, and ImageNet classification. For instance, Transformer-LS achieves 0.97 test BPC on enwik8 using half the number of parameters than previous method, while being faster and is able to handle 3x as long sequences compared to its full-attention version on the same hardware. On ImageNet, it can obtain the state-of-the-art results (e.g., a moderate size of 55.8M …
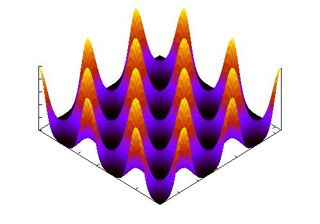
Gaussian Process models are a rich distribution over functions with inductive biases controlled by a kernel function. Learning occurs through optimisation of the kernel hyperparameters using the marginal likelihood as the objective. This work proposes nested sampling as a means of marginalising kernel hyperparameters, because it is a technique that is well-suited to exploring complex, multi-modal distributions. We benchmark against Hamiltonian Monte Carlo on time-series and two-dimensional regression tasks, finding that a principled approach to quantifying hyperparameter uncertainty substantially improves the quality of prediction intervals.

Artists and video game designers often construct 2D animations using libraries of sprites---textured patches of objects and characters. We propose a deep learning approach that decomposes sprite-based video animations into a disentangled representation of recurring graphic elements in a self-supervised manner. By jointly learning a dictionary of possibly transparent patches and training a network that places them onto a canvas, we deconstruct sprite-based content into a sparse, consistent, and explicit representation that can be easily used in downstream tasks, like editing or analysis. Our framework offers a promising approach for discovering recurring visual patterns in image collections without supervision.
Transforming a causal system from a given initial state to a desired target state is an important task permeating multiple fields including control theory, biology, and materials science. In causal models, such transformations can be achieved by performing a set of interventions. In this paper, we consider the problem of identifying a shift intervention that matches the desired mean of a system through active learning. We define the Markov equivalence class that is identifiable from shift interventions and propose two active learning strategies that are guaranteed to exactly match a desired mean. We then derive a worst-case lower bound for the number of interventions required and show that these strategies are optimal for certain classes of graphs. In particular, we show that our strategies may require exponentially fewer interventions than the previously considered approaches, which optimize for structure learning in the underlying causal graph. In line with our theoretical results, we also demonstrate experimentally that our proposed active learning strategies require fewer interventions compared to several baselines.
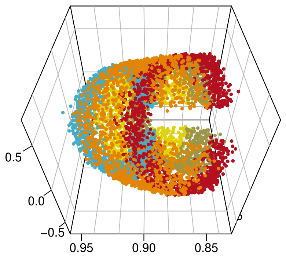
Given a graph or similarity matrix, we consider the problem of recovering a notion of true distance between the nodes, and so their true positions. We show that this can be accomplished in two steps: matrix factorisation, followed by nonlinear dimension reduction. This combination is effective because the point cloud obtained in the first step lives close to a manifold in which latent distance is encoded as geodesic distance. Hence, a nonlinear dimension reduction tool, approximating geodesic distance, can recover the latent positions, up to a simple transformation. We give a detailed account of the case where spectral embedding is used, followed by Isomap, and provide encouraging experimental evidence for other combinations of techniques.
As major progress is made in open-ended text generation, measuring how close machine-generated text is to human language remains a critical open problem. We introduce Mauve, a comparison measure for open-ended text generation, which directly compares the learnt distribution from a text generation model to the distribution of human-written text using divergence frontiers. Mauve scales up to modern text generation models by computing information divergences in a quantized embedding space. Through an extensive empirical study on three open-ended generation tasks, we find that Mauve identifies known properties of generated text, scales naturally with model size, and correlates with human judgments, with fewer restrictions than existing distributional evaluation metrics.
Understanding the generalization of deep neural networks is one of the most important tasks in deep learning. Although much progress has been made, theoretical error bounds still often behave disparately from empirical observations. In this work, we develop margin-based generalization bounds, where the margins are normalized with optimal transport costs between independent random subsets sampled from the training distribution. In particular, the optimal transport cost can be interpreted as a generalization of variance which captures the structural properties of the learned feature space. Our bounds robustly predict the generalization error, given training data and network parameters, on large scale datasets. Theoretically, we demonstrate that the concentration and separation of features play crucial roles in generalization, supporting empirical results in the literature.
Machine learning has successfully framed many sequential decision making problems as either supervised prediction, or optimal decision-making policy identification via reinforcement learning. In data-constrained offline settings, both approaches may fail as they assume fully optimal behavior or rely on exploring alternatives that may not exist. We introduce an inherently different approach that identifies "dead-ends" of a state space. We focus on patient condition in the intensive care unit, where a "medical dead-end" indicates that a patient will expire, regardless of all potential future treatment sequences. We postulate "treatment security" as avoiding treatments with probability proportional to their chance of leading to dead-ends, present a formal proof, and frame discovery as an RL problem. We then train three independent deep neural models for automated state construction, dead-end discovery and confirmation. Our empirical results discover that dead-ends exist in real clinical data among septic patients, and further reveal gaps between secure treatments and those administered.
Recently, a new trend of exploring sparsity for accelerating neural network training has emerged, embracing the paradigm of training on the edge. This paper proposes a novel Memory-Economic Sparse Training (MEST) framework targeting for accurate and fast execution on edge devices. The proposed MEST framework consists of enhancements by Elastic Mutation (EM) and Soft Memory Bound (&S) that ensure superior accuracy at high sparsity ratios. Different from the existing works for sparse training, this current work reveals the importance of sparsity schemes on the performance of sparse training in terms of accuracy as well as training speed on real edge devices. On top of that, the paper proposes to employ data efficiency for further acceleration of sparse training. Our results suggest that unforgettable examples can be identified in-situ even during the dynamic exploration of sparsity masks in the sparse training process, and therefore can be removed for further training speedup on edge devices. Comparing with state-of-the-art (SOTA) works on accuracy, our MEST increases Top-1 accuracy significantly on ImageNet when using the same unstructured sparsity scheme. Systematical evaluation on accuracy, training speed, and memory footprint are conducted, where the proposed MEST framework consistently outperforms representative SOTA works. A reviewer strongly against …
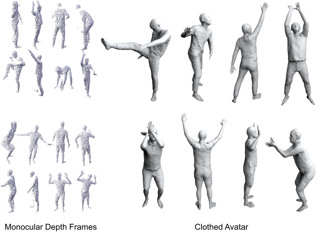
In this paper, we aim to create generalizable and controllable neural signed distance fields (SDFs) that represent clothed humans from monocular depth observations. Recent advances in deep learning, especially neural implicit representations, have enabled human shape reconstruction and controllable avatar generation from different sensor inputs. However, to generate realistic cloth deformations from novel input poses, watertight meshes or dense full-body scans are usually needed as inputs. Furthermore, due to the difficulty of effectively modeling pose-dependent cloth deformations for diverse body shapes and cloth types, existing approaches resort to per-subject/cloth-type optimization from scratch, which is computationally expensive. In contrast, we propose an approach that can quickly generate realistic clothed human avatars, represented as controllable neural SDFs, given only monocular depth images. We achieve this by using meta-learning to learn an initialization of a hypernetwork that predicts the parameters of neural SDFs. The hypernetwork is conditioned on human poses and represents a clothed neural avatar that deforms non-rigidly according to the input poses. Meanwhile, it is meta-learned to effectively incorporate priors of diverse body shapes and cloth types and thus can be much faster to fine-tune, compared to models trained from scratch. We qualitatively and quantitatively show that our approach outperforms state-of-the-art …
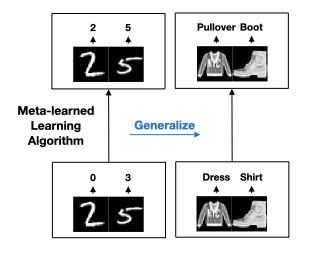
Many concepts have been proposed for meta learning with neural networks (NNs), e.g., NNs that learn to reprogram fast weights, Hebbian plasticity, learned learning rules, and meta recurrent NNs. Our Variable Shared Meta Learning (VSML) unifies the above and demonstrates that simple weight-sharing and sparsity in an NN is sufficient to express powerful learning algorithms (LAs) in a reusable fashion. A simple implementation of VSML where the weights of a neural network are replaced by tiny LSTMs allows for implementing the backpropagation LA solely by running in forward-mode. It can even meta learn new LAs that differ from online backpropagation and generalize to datasets outside of the meta training distribution without explicit gradient calculation. Introspection reveals that our meta learned LAs learn through fast association in a way that is qualitatively different from gradient descent.
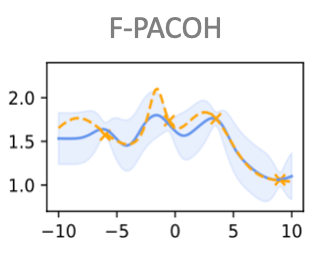
Meta-Learning promises to enable more data-efficient inference by harnessing previous experience from related learning tasks. While existing meta-learning methods help us to improve the accuracy of our predictions in face of data scarcity, they fail to supply reliable uncertainty estimates, often being grossly overconfident in their predictions. Addressing these shortcomings, we introduce a novel meta-learning framework, called F-PACOH, that treats meta-learned priors as stochastic processes and performs meta-level regularization directly in the function space. This allows us to directly steer the probabilistic predictions of the meta-learner towards high epistemic uncertainty in regions of insufficient meta-training data and, thus, obtain well-calibrated uncertainty estimates. Finally, we showcase how our approach can be integrated with sequential decision making, where reliable uncertainty quantification is imperative. In our benchmark study on meta-learning for Bayesian Optimization (BO), F-PACOH significantly outperforms all other meta-learners and standard baselines. Even in a challenging lifelong BO setting, where optimization tasks arrive one at a time and the meta-learner needs to build up informative prior knowledge incrementally, our proposed method demonstrates strong positive transfer.
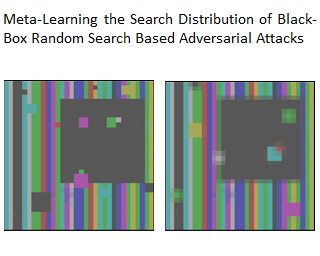
Adversarial attacks based on randomized search schemes have obtained state-of-the-art results in black-box robustness evaluation recently. However, as we demonstrate in this work, their efficiency in different query budget regimes depends on manual design and heuristic tuning of the underlying proposal distributions. We study how this issue can be addressed by adapting the proposal distribution online based on the information obtained during the attack. We consider Square Attack, which is a state-of-the-art score-based black-box attack, and demonstrate how its performance can be improved by a learned controller that adjusts the parameters of the proposal distribution online during the attack. We train the controller using gradient-based end-to-end training on a CIFAR10 model with white box access. We demonstrate that plugging the learned controller into the attack consistently improves its black-box robustness estimate in different query regimes by up to 20% for a wide range of different models with black-box access. We further show that the learned adaptation principle transfers well to the other data distributions such as CIFAR100 or ImageNet and to the targeted attack setting.
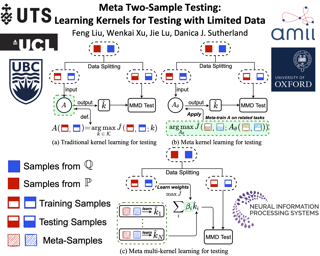
Modern kernel-based two-sample tests have shown great success in distinguishing complex, high-dimensional distributions by learning appropriate kernels (or, as a special case, classifiers). Previous work, however, has assumed that many samples are observed from both of the distributions being distinguished. In realistic scenarios with very limited numbers of data samples, it can be challenging to identify a kernel powerful enough to distinguish complex distributions. We address this issue by introducing the problem of meta two-sample testing (M2ST), which aims to exploit (abundant) auxiliary data on related tasks to find an algorithm that can quickly identify a powerful test on new target tasks. We propose two specific algorithms for this task: a generic scheme which improves over baselines, and a more tailored approach which performs even better. We provide both theoretical justification and empirical evidence that our proposed meta-testing schemes outperform learning kernel-based tests directly from scarce observations, and identify when such schemes will be successful.
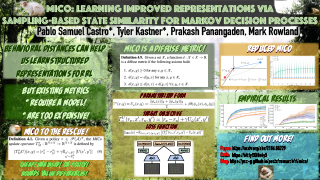
We present a new behavioural distance over the state space of a Markov decision process, and demonstrate the use of this distance as an effective means of shaping the learnt representations of deep reinforcement learning agents. While existing notions of state similarity are typically difficult to learn at scale due to high computational cost and lack of sample-based algorithms, our newly-proposed distance addresses both of these issues. In addition to providing detailed theoretical analyses, we provide empirical evidence that learning this distance alongside the value function yields structured and informative representations, including strong results on the Arcade Learning Environment benchmark.
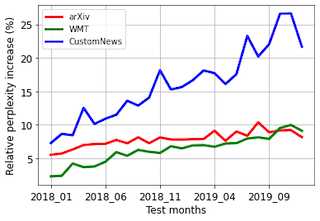
Our world is open-ended, non-stationary, and constantly evolving; thus what we talk about and how we talk about it change over time. This inherent dynamic nature of language contrasts with the current static language modelling paradigm, which trains and evaluates models on utterances from overlapping time periods. Despite impressive recent progress, we demonstrate that Transformer-XL language models perform worse in the realistic setup of predicting future utterances from beyond their training period, and that model performance becomes increasingly worse with time. We find that, while increasing model size alone—a key driver behind recent progress—does not solve this problem, having models that continually update their knowledge with new information can indeed mitigate this performance degradation over time. Hence, given the compilation of ever-larger language modelling datasets, combined with the growing list of language-model-based NLP applications that require up-to-date factual knowledge about the world, we argue that now is the right time to rethink the static way in which we currently train and evaluate our language models, and develop adaptive language models that can remain up-to-date with respect to our ever-changing and non-stationary world. We publicly release our dynamic, streaming language modelling benchmarks for WMT and arXiv to facilitate language model evaluation …

Most existing set encoding algorithms operate under the implicit assumption that all the set elements are accessible, and that there are ample computational and memory resources to load the set into memory during training and inference. However, both assumptions fail when the set is excessively large such that it is impossible to load all set elements into memory, or when data arrives in a stream. To tackle such practical challenges in large-scale set encoding, the general set-function constraints of permutation invariance and equivariance are not sufficient. We introduce a new property termed Mini-Batch Consistency (MBC) that is required for large scale mini-batch set encoding. Additionally, we present a scalable and efficient attention-based set encoding mechanism that is amenable to mini-batch processing of sets, and capable of updating set representations as data arrives. The proposed method adheres to the required symmetries of invariance and equivariance as well as maintaining MBC for any partition of the input set. We perform extensive experiments and show that our method is computationally efficient and results in rich set encoding representations for set-structured data.
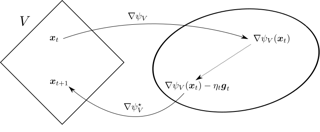
Motivated by the connection between sampling and optimization, we study a mirror descent analogue of Langevin dynamics and analyze three different discretization schemes, giving nonasymptotic convergence rate under functional inequalities such as Log-Sobolev in the corresponding metric. Compared to the Euclidean setting, the result reveals intricate relationship between the underlying geometry and the target distribution and suggests that care might need to be taken in order for the discretized algorithm to achieve vanishing bias with diminishing stepsize for sampling from potentials under weaker smoothness/convexity regularity conditions.
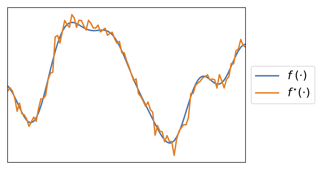
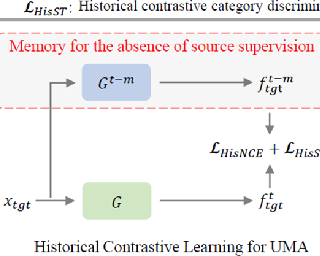
Unsupervised domain adaptation aims to align a labeled source domain and an unlabeled target domain, but it requires to access the source data which often raises concerns in data privacy, data portability and data transmission efficiency. We study unsupervised model adaptation (UMA), or called Unsupervised Domain Adaptation without Source Data, an alternative setting that aims to adapt source-trained models towards target distributions without accessing source data. To this end, we design an innovative historical contrastive learning (HCL) technique that exploits historical source hypothesis to make up for the absence of source data in UMA. HCL addresses the UMA challenge from two perspectives. First, it introduces historical contrastive instance discrimination (HCID) that learns from target samples by contrasting their embeddings which are generated by the currently adapted model and the historical models. With the historical models, HCID encourages UMA to learn instance-discriminative target representations while preserving the source hypothesis. Second, it introduces historical contrastive category discrimination (HCCD) that pseudo-labels target samples to learn category-discriminative target representations. Specifically, HCCD re-weights pseudo labels according to their prediction consistency across the current and historical models. Extensive experiments show that HCL outperforms and state-of-the-art methods consistently across a variety of visual tasks and setups.
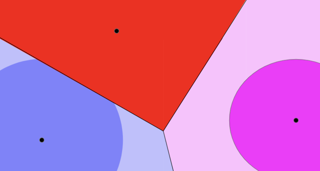
Decision-time planning is the process of constructing a transient, local policy with the intent of using it to make the immediate decision. Monte Carlo tree search (MCTS), which has been leveraged to great success in Go, chess, shogi, Hex, Atari, and other settings, is perhaps the most celebrated decision-time planning algorithm. Unfortunately, in its original form, MCTS can degenerate to one-step search in domains with stochasticity. Progressive widening is one way to ameliorate this issue, but we argue that it possesses undesirable properties for some settings. In this work, we present a method, called abstraction refining, for extending MCTS to stochastic environments which, unlike progressive widening, leverages the geometry of the state space. We argue that leveraging the geometry of the space can offer advantages. To support this claim, we present a series of experimental examples in which abstraction refining outperforms progressive widening, given equal simulation budgets.
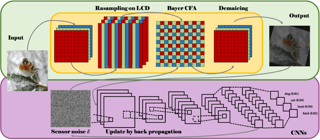
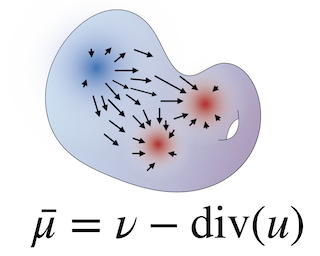
We are interested in learning generative models for complex geometries described via manifolds, such as spheres, tori, and other implicit surfaces. Current extensions of existing (Euclidean) generative models are restricted to specific geometries and typically suffer from high computational costs. We introduce Moser Flow (MF), a new class of generative models within the family of continuous normalizing flows (CNF). MF also produces a CNF via a solution to the change-of-variable formula, however differently from other CNF methods, its model (learned) density is parameterized as the source (prior) density minus the divergence of a neural network (NN). The divergence is a local, linear differential operator, easy to approximate and calculate on manifolds. Therefore, unlike other CNFs, MF does not require invoking or backpropagating through an ODE solver during training. Furthermore, representing the model density explicitly as the divergence of a NN rather than as a solution of an ODE facilitates learning high fidelity densities. Theoretically, we prove that MF constitutes a universal density approximator under suitable assumptions. Empirically, we demonstrate for the first time the use of flow models for sampling from general curved surfaces and achieve significant improvements in density estimation, sample quality, and training complexity over existing CNFs on …
The pre-trained language model (PrLM) demonstrates domination in downstream natural language processing tasks, in which multilingual PrLM takes advantage of language universality to alleviate the issue of limited resources for low-resource languages. Despite its successes, the performance of multilingual PrLM is still unsatisfactory, when multilingual PrLMs only focus on plain text and ignore obvious universal linguistic structure clues. Existing PrLMs have shown that monolingual linguistic structure knowledge may bring about better performance. Thus we propose a novel multilingual PrLM that supports both explicit universal dependency parsing and implicit language modeling. Syntax in terms of universal dependency parse serves as not only pre-training objective but also learned representation in our model, which brings unprecedented PrLM interpretability and convenience in downstream task use. Our model outperforms two popular multilingual PrLM, multilingual-BERT and XLM-R, on cross-lingual natural language understanding (NLU) benchmarks and linguistic structure parsing datasets, demonstrating the effectiveness and stronger cross-lingual modeling capabilities of our approach.
Generating fluent and relevant language to describe visual content is critical for the video captioning task. Many existing methods generate captions using sequence models that predict words in a left-to-right order. In this paper, we investigate a graph-structured model for caption generation by explicitly modeling the hierarchical structure in the sentences to further improve the fluency and relevance of sentences. To this end, we propose a novel video captioning method that generates a sentence by first constructing a multi-modal dependency tree and then traversing the constructed tree, where the syntactic structure and semantic relationship in the sentence are represented by the tree topology. To take full advantage of the information from both vision and language, both the visual and textual representation features are encoded into each tree node. Different from existing dependency parsing methods that generate uni-modal dependency trees for language understanding, our method construct s multi-modal dependency trees for language generation of images and videos. We also propose a tree-structured reinforcement learning algorithm to effectively optimize the captioning model where a novel reward is designed by evaluating the semantic consistency between the generated sub-tree and the ground-truth tree. Extensive experiments on several video captioning datasets demonstrate the effectiveness of …
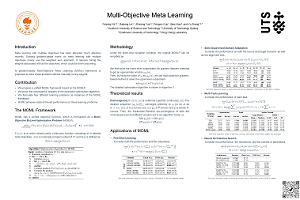
Meta learning with multiple objectives has been attracted much attention recently since many applications need to consider multiple factors when designing learning models. Existing gradient-based works on meta learning with multiple objectives mainly combine multiple objectives into a single objective in a weighted sum manner. This simple strategy usually works but it requires to tune the weights associated with all the objectives, which could be time consuming. Different from those works, in this paper, we propose a gradient-based Multi-Objective Meta Learning (MOML) framework without manually tuning weights. Specifically, MOML formulates the objective function of meta learning with multiple objectives as a Multi-Objective Bi-Level optimization Problem (MOBLP) where the upper-level subproblem is to solve several possibly conflicting objectives for the meta learner. To solve the MOBLP, we devise the first gradient-based optimization algorithm by alternatively solving the lower-level and upper-level subproblems via the gradient descent method and the gradient-based multi-objective optimization method, respectively. Theoretically, we prove the convergence properties of the proposed gradient-based optimization algorithm. Empirically, we show the effectiveness of the proposed MOML framework in several meta learning problems, including few-shot learning, domain adaptation, multi-task learning, and neural architecture search. The source code of MOML is available at https://github.com/Baijiong-Lin/MOML.
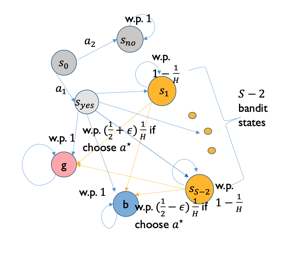
Graph neural network (GNN)'s success in graph classification is closely related to the Weisfeiler-Lehman (1-WL) algorithm. By iteratively aggregating neighboring node features to a center node, both 1-WL and GNN obtain a node representation that encodes a rooted subtree around the center node. These rooted subtree representations are then pooled into a single representation to represent the whole graph. However, rooted subtrees are of limited expressiveness to represent a non-tree graph. To address it, we propose Nested Graph Neural Networks (NGNNs). NGNN represents a graph with rooted subgraphs instead of rooted subtrees, so that two graphs sharing many identical subgraphs (rather than subtrees) tend to have similar representations. The key is to make each node representation encode a subgraph around it more than a subtree. To achieve this, NGNN extracts a local subgraph around each node and applies a base GNN to each subgraph to learn a subgraph representation. The whole-graph representation is then obtained by pooling these subgraph representations. We provide a rigorous theoretical analysis showing that NGNN is strictly more powerful than 1-WL. In particular, we proved that NGNN can discriminate almost all r-regular graphs, where 1-WL always fails. Moreover, unlike other more powerful GNNs, NGNN only introduces …
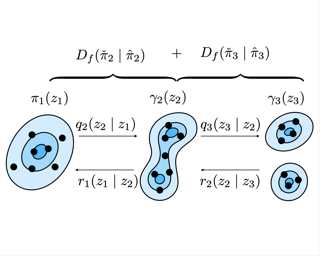
We develop nested variational inference (NVI), a family of methods that learn proposals for nested importance samplers by minimizing an forward or reverse KL divergence at each level of nesting. NVI is applicable to many commonly-used importance sampling strategies and provides a mechanism for learning intermediate densities, which can serve as heuristics to guide the sampler. Our experiments apply NVI to (a) sample from a multimodal distribution using a learned annealing path (b) learn heuristics that approximate the likelihood of future observations in a hidden Markov model and (c) to perform amortized inference in hierarchical deep generative models. We observe that optimizing nested objectives leads to improved sample quality in terms of log average weight and effective sample size.

When solving two-player zero-sum games, multi-agent reinforcement learning (MARL) algorithms often create populations of agents where, at each iteration, a new agent is discovered as the best response to a mixture over the opponent population. Within such a process, the update rules of "who to compete with" (i.e., the opponent mixture) and "how to beat them" (i.e., finding best responses) are underpinned by manually developed game theoretical principles such as fictitious play and Double Oracle. In this paper, we introduce a novel framework—Neural Auto-Curricula (NAC)—that leverages meta-gradient descent to automate the discovery of the learning update rule without explicit human design. Specifically, we parameterise the opponent selection module by neural networks and the best-response module by optimisation subroutines, and update their parameters solely via interaction with the game engine, where both players aim to minimise their exploitability. Surprisingly, even without human design, the discovered MARL algorithms achieve competitive or even better performance with the state-of-the-art population-based game solvers (e.g., PSRO) on Games of Skill, differentiable Lotto, non-transitive Mixture Games, Iterated Matching Pennies, and Kuhn Poker. Additionally, we show that NAC is able to generalise from small games to large games, for example training on Kuhn Poker and outperforming PSRO on …
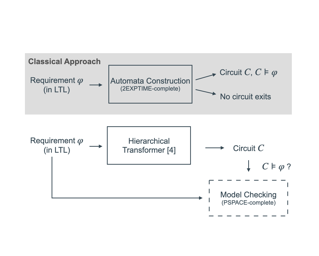
We train hierarchical Transformers on the task of synthesizing hardware circuits directly out of high-level logical specifications in linear-time temporal logic (LTL). The LTL synthesis problem is a well-known algorithmic challenge with a long history and an annual competition is organized to track the improvement of algorithms and tooling over time. New approaches using machine learning might open a lot of possibilities in this area, but suffer from the lack of sufficient amounts of training data. In this paper, we consider a method to generate large amounts of additional training data, i.e., pairs of specifications and circuits implementing them. We ensure that this synthetic data is sufficiently close to human-written specifications by mining common patterns from the specifications used in the synthesis competitions. We show that hierarchical Transformers trained on this synthetic data solve a significant portion of problems from the synthesis competitions, and even out-of-distribution examples from a recent case study.
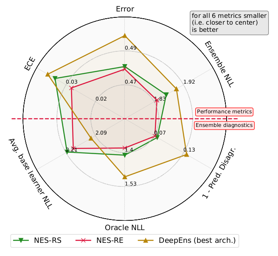
Ensembles of neural networks achieve superior performance compared to standalone networks in terms of accuracy, uncertainty calibration and robustness to dataset shift. Deep ensembles, a state-of-the-art method for uncertainty estimation, only ensemble random initializations of a fixed architecture. Instead, we propose two methods for automatically constructing ensembles with varying architectures, which implicitly trade-off individual architectures’ strengths against the ensemble’s diversity and exploit architectural variation as a source of diversity. On a variety of classification tasks and modern architecture search spaces, we show that the resulting ensembles outperform deep ensembles not only in terms of accuracy but also uncertainty calibration and robustness to dataset shift. Our further analysis and ablation studies provide evidence of higher ensemble diversity due to architectural variation, resulting in ensembles that can outperform deep ensembles, even when having weaker average base learners. To foster reproducibility, our code is available: https://github.com/automl/nes
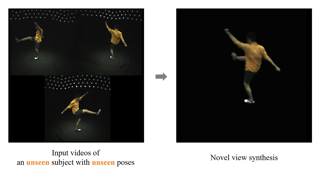
In this paper, we aim at synthesizing a free-viewpoint video of an arbitrary human performance using sparse multi-view cameras. Recently, several works have addressed this problem by learning person-specific neural radiance fields (NeRF) to capture the appearance of a particular human. In parallel, some work proposed to use pixel-aligned features to generalize radiance fields to arbitrary new scenes and objects. Adopting such generalization approaches to humans, however, is highly challenging due to the heavy occlusions and dynamic articulations of body parts. To tackle this, we propose Neural Human Performer, a novel approach that learns generalizable neural radiance fields based on a parametric human body model for robust performance capture. Specifically, we first introduce a temporal transformer that aggregates tracked visual features based on the skeletal body motion over time. Moreover, a multi-view transformer is proposed to perform cross-attention between the temporally-fused features and the pixel-aligned features at each time step to integrate observations on the fly from multiple views. Experiments on the ZJU-MoCap and AIST datasets show that our method significantly outperforms recent generalizable NeRF methods on unseen identities and poses.
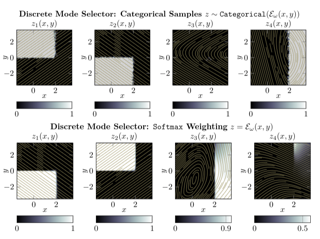
Effective control and prediction of dynamical systems require appropriate handling of continuous-time and discrete, event-triggered processes. Stochastic hybrid systems (SHSs), common across engineering domains, provide a formalism for dynamical systems subject to discrete, possibly stochastic, state jumps and multi-modal continuous-time flows. Despite the versatility and importance of SHSs across applications, a general procedure for the explicit learning of both discrete events and multi-mode continuous dynamics remains an open problem. This work introduces Neural Hybrid Automata (NHAs), a recipe for learning SHS dynamics without a priori knowledge on the number, mode parameters, and inter-modal transition dynamics. NHAs provide a systematic inference method based on normalizing flows, neural differential equations, and self-supervision. We showcase NHAs on several tasks, including mode recovery and flow learning in systems with stochastic transitions, and end-to-end learning of hierarchical robot controllers.
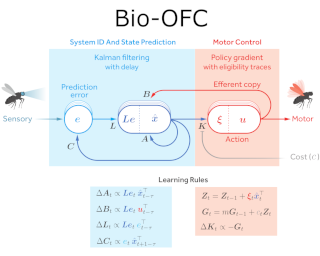
A major problem in motor control is understanding how the brain plans and executes proper movements in the face of delayed and noisy stimuli. A prominent framework for addressing such control problems is Optimal Feedback Control (OFC). OFC generates control actions that optimize behaviorally relevant criteria by integrating noisy sensory stimuli and the predictions of an internal model using the Kalman filter or its extensions. However, a satisfactory neural model of Kalman filtering and control is lacking because existing proposals have the following limitations: not considering the delay of sensory feedback, training in alternating phases, requiring knowledge of the noise covariance matrices, as well as that of systems dynamics. Moreover, the majority of these studies considered Kalman filtering in isolation, and not jointly with control. To address these shortcomings, we introduce a novel online algorithm which combines adaptive Kalman filtering with a model free control approach (i.e., policy gradient algorithm). We implement this algorithm in a biologically plausible neural network with local synaptic plasticity rules. This network, with local synaptic plasticity rules, performs system identification, Kalman filtering and control with delayed noisy sensory feedback. This network performs system identification and Kalman filtering, without the need for multiple phases with distinct …
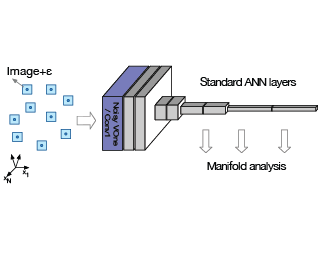
Adversarial examples are often cited by neuroscientists and machine learning researchers as an example of how computational models diverge from biological sensory systems. Recent work has proposed adding biologically-inspired components to visual neural networks as a way to improve their adversarial robustness. One surprisingly effective component for reducing adversarial vulnerability is response stochasticity, like that exhibited by biological neurons. Here, using recently developed geometrical techniques from computational neuroscience, we investigate how adversarial perturbations influence the internal representations of standard, adversarially trained, and biologically-inspired stochastic networks. We find distinct geometric signatures for each type of network, revealing different mechanisms for achieving robust representations. Next, we generalize these results to the auditory domain, showing that neural stochasticity also makes auditory models more robust to adversarial perturbations. Geometric analysis of the stochastic networks reveals overlap between representations of clean and adversarially perturbed stimuli, and quantitatively demonstrate that competing geometric effects of stochasticity mediate a tradeoff between adversarial and clean performance. Our results shed light on the strategies of robust perception utilized by adversarially trained and stochastic networks, and help explain how stochasticity may be beneficial to machine and biological computation.
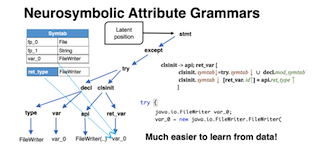
State-of-the-art neural models of source code tend to be evaluated on the generation of individual expressions and lines of code, and commonly fail on long-horizon tasks such as the generation of entire method bodies. We propose to address this deficiency using weak supervision from a static program analyzer. Our neurosymbolic method allows a deep generative model to symbolically compute, using calls to a static analysis tool, long-distance semantic relationships in the code that it has already generated. During training, the model observes these relationships and learns to generate programs conditioned on them. We apply our approach to the problem of generating entire Java methods given the remainder of the class that contains the method. Our experiments show that the approach substantially outperforms a state-of-the-art transformer and a model that explicitly tries to learn program semantics on this task, both in terms of producing programs free of basic semantic errors and in terms of syntactically matching the ground truth.
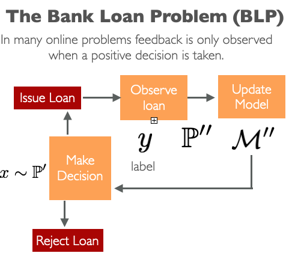
We study a class of classification problems best exemplified by the \emph{bank loan} problem, where a lender decides whether or not to issue a loan. The lender only observes whether a customer will repay a loan if the loan is issued to begin with, and thus modeled decisions affect what data is available to the lender for future decisions. As a result, it is possible for the lender's algorithm to ``get stuck'' with a self-fulfilling model. This model never corrects its false negatives, since it never sees the true label for rejected data, thus accumulating infinite regret. In the case of linear models, this issue can be addressed by adding optimism directly into the model predictions. However, there are few methods that extend to the function approximation case using Deep Neural Networks. We present Pseudo-Label Optimism (PLOT), a conceptually and computationally simple method for this setting applicable to DNNs. \PLOT{} adds an optimistic label to the subset of decision points the current model is deciding on, trains the model on all data so far (including these points along with their optimistic labels), and finally uses the resulting \emph{optimistic} model for decision making. \PLOT{} achieves competitive performance on a set of …
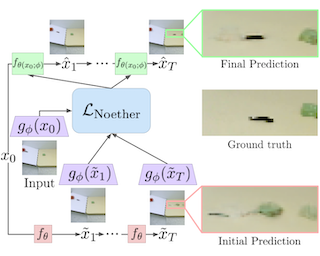
Progress in machine learning (ML) stems from a combination of data availability, computational resources, and an appropriate encoding of inductive biases. Useful biases often exploit symmetries in the prediction problem, such as convolutional networks relying on translation equivariance. Automatically discovering these useful symmetries holds the potential to greatly improve the performance of ML systems, but still remains a challenge. In this work, we focus on sequential prediction problems and take inspiration from Noether's theorem to reduce the problem of finding inductive biases to meta-learning useful conserved quantities. We propose Noether Networks: a new type of architecture where a meta-learned conservation loss is optimized inside the prediction function. We show, theoretically and experimentally, that Noether Networks improve prediction quality, providing a general framework for discovering inductive biases in sequential problems.
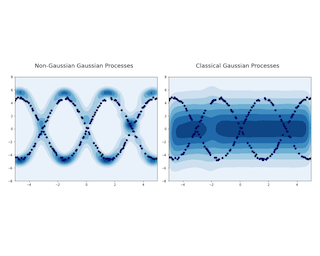
Gaussian Processes (GPs) have been widely used in machine learning to model distributions over functions, with applications including multi-modal regression, time-series prediction, and few-shot learning. GPs are particularly useful in the last application since they rely on Normal distributions and enable closed-form computation of the posterior probability function. Unfortunately, because the resulting posterior is not flexible enough to capture complex distributions, GPs assume high similarity between subsequent tasks - a requirement rarely met in real-world conditions. In this work, we address this limitation by leveraging the flexibility of Normalizing Flows to modulate the posterior predictive distribution of the GP. This makes the GP posterior locally non-Gaussian, therefore we name our method Non-Gaussian Gaussian Processes (NGGPs). More precisely, we propose an invertible ODE-based mapping that operates on each component of the random variable vectors and shares the parameters across all of them. We empirically tested the flexibility of NGGPs on various few-shot learning regression datasets, showing that the mapping can incorporate context embedding information to model different noise levels for periodic functions. As a result, our method shares the structure of the problem between subsequent tasks, but the contextualization allows for adaptation to dissimilarities. NGGPs outperform the competing state-of-the-art approaches on …
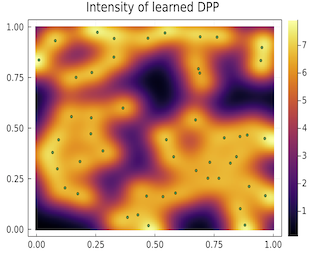
Determinantal Point Process (DPPs) are statistical models for repulsive point patterns. Both sampling and inference are tractable for DPPs, a rare feature among models with negative dependence that explains their popularity in machine learning and spatial statistics. Parametric and nonparametric inference methods have been proposed in the finite case, i.e. when the point patterns live in a finite ground set. In the continuous case, only parametric methods have been investigated, while nonparametric maximum likelihood for DPPs -- an optimization problem over trace-class operators -- has remained an open question. In this paper, we show that a restricted version of this maximum likelihood (MLE) problem falls within the scope of a recent representer theorem for nonnegative functions in an RKHS. This leads to a finite-dimensional problem, with strong statistical ties to the original MLE. Moreover, we propose, analyze, and demonstrate a fixed point algorithm to solve this finite-dimensional problem. Finally, we also provide a controlled estimate of the correlation kernel of the DPP, thus providing more interpretability.
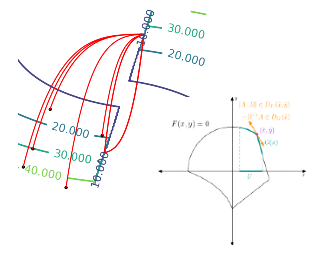
In view of training increasingly complex learning architectures, we establish a nonsmooth implicit function theorem with an operational calculus. Our result applies to most practical problems (i.e., definable problems) provided that a nonsmooth form of the classical invertibility condition is fulfilled. This approach allows for formal subdifferentiation: for instance, replacing derivatives by Clarke Jacobians in the usual differentiation formulas is fully justified for a wide class of nonsmooth problems. Moreover this calculus is entirely compatible with algorithmic differentiation (e.g., backpropagation). We provide several applications such as training deep equilibrium networks, training neural nets with conic optimization layers, or hyperparameter-tuning for nonsmooth Lasso-type models. To show the sharpness of our assumptions, we present numerical experiments showcasing the extremely pathological gradient dynamics one can encounter when applying implicit algorithmic differentiation without any hypothesis.
In theory, the choice of ReLU(0) in [0, 1] for a neural network has a negligible influence both on backpropagation and training. Yet, in the real world, 32 bits default precision combined with the size of deep learning problems makes it a hyperparameter of training methods. We investigate the importance of the value of ReLU'(0) for several precision levels (16, 32, 64 bits), on various networks (fully connected, VGG, ResNet) and datasets (MNIST, CIFAR10, SVHN, ImageNet). We observe considerable variations of backpropagation outputs which occur around half of the time in 32 bits precision. The effect disappears with double precision, while it is systematic at 16 bits. For vanilla SGD training, the choice ReLU'(0) = 0 seems to be the most efficient. For our experiments on ImageNet the gain in test accuracy over ReLU'(0) = 1 was more than 10 points (two runs). We also evidence that reconditioning approaches as batch-norm or ADAM tend to buffer the influence of ReLU'(0)’s value. Overall, the message we convey is that algorithmic differentiation of nonsmooth problems potentially hides parameters that could be tuned advantageously.
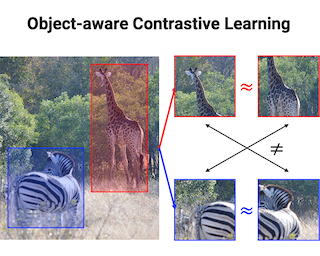
Contrastive self-supervised learning has shown impressive results in learning visual representations from unlabeled images by enforcing invariance against different data augmentations. However, the learned representations are often contextually biased to the spurious scene correlations of different objects or object and background, which may harm their generalization on the downstream tasks. To tackle the issue, we develop a novel object-aware contrastive learning framework that first (a) localizes objects in a self-supervised manner and then (b) debias scene correlations via appropriate data augmentations considering the inferred object locations. For (a), we propose the contrastive class activation map (ContraCAM), which finds the most discriminative regions (e.g., objects) in the image compared to the other images using the contrastively trained models. We further improve the ContraCAM to detect multiple objects and entire shapes via an iterative refinement procedure. For (b), we introduce two data augmentations based on ContraCAM, object-aware random crop and background mixup, which reduce contextual and background biases during contrastive self-supervised learning, respectively. Our experiments demonstrate the effectiveness of our representation learning framework, particularly when trained under multi-object images or evaluated under the background (and distribution) shifted images. Code is available at https://github.com/alinlab/object-aware-contrastive.
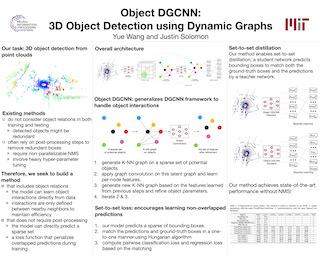
3D object detection often involves complicated training and testing pipelines, which require substantial domain knowledge about individual datasets. Inspired by recent non-maximum suppression-free 2D object detection models, we propose a 3D object detection architecture on point clouds. Our method models 3D object detection as message passing on a dynamic graph, generalizing the DGCNN framework to predict a set of objects. In our construction, we remove the necessity of post-processing via object confidence aggregation or non-maximum suppression. To facilitate object detection from sparse point clouds, we also propose a set-to-set distillation approach customized to 3D detection. This approach aligns the outputs of the teacher model and the student model in a permutation-invariant fashion, significantly simplifying knowledge distillation for the 3D detection task. Our method achieves state-of-the-art performance on autonomous driving benchmarks. We also provide abundant analysis of the detection model and distillation framework.
In reinforcement learning, a promising direction to avoid online trial-and-error costs is learning from an offline dataset. Current offline reinforcement learning methods commonly learn in the policy space constrained to in-support regions by the offline dataset, in order to ensure the robustness of the outcome policies. Such constraints, however, also limit the potential of the outcome policies. In this paper, to release the potential of offline policy learning, we investigate the decision-making problems in out-of-support regions directly and propose offline Model-based Adaptable Policy LEarning (MAPLE). By this approach, instead of learning in in-support regions, we learn an adaptable policy that can adapt its behavior in out-of-support regions when deployed. We conduct experiments on MuJoCo controlling tasks with offline datasets. The results show that the proposed method can make robust decisions in out-of-support regions and achieve better performance than SOTA algorithms.
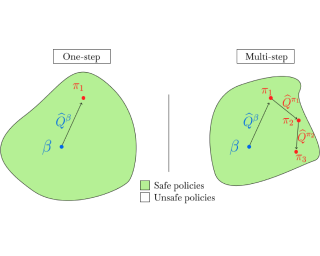
Most prior approaches to offline reinforcement learning (RL) have taken an iterative actor-critic approach involving off-policy evaluation. In this paper we show that simply doing one step of constrained/regularized policy improvement using an on-policy Q estimate of the behavior policy performs surprisingly well. This one-step algorithm beats the previously reported results of iterative algorithms on a large portion of the D4RL benchmark. The one-step baseline achieves this strong performance while being notably simpler and more robust to hyperparameters than previously proposed iterative algorithms. We argue that the relatively poor performance of iterative approaches is a result of the high variance inherent in doing off-policy evaluation and magnified by the repeated optimization of policies against those estimates. In addition, we hypothesize that the strong performance of the one-step algorithm is due to a combination of favorable structure in the environment and behavior policy.
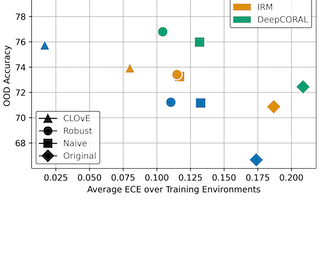
Out-of-domain (OOD) generalization is a significant challenge for machine learning models. Many techniques have been proposed to overcome this challenge, often focused on learning models with certain invariance properties. In this work, we draw a link between OOD performance and model calibration, arguing that calibration across multiple domains can be viewed as a special case of an invariant representation leading to better OOD generalization. Specifically, we show that under certain conditions, models which achieve \emph{multi-domain calibration} are provably free of spurious correlations. This leads us to propose multi-domain calibration as a measurable and trainable surrogate for the OOD performance of a classifier. We therefore introduce methods that are easy to apply and allow practitioners to improve multi-domain calibration by training or modifying an existing model, leading to better performance on unseen domains. Using four datasets from the recently proposed WILDS OOD benchmark, as well as the Colored MNIST, we demonstrate that training or tuning models so they are calibrated across multiple domains leads to significantly improved performance on unseen test domains. We believe this intriguing connection between calibration and OOD generalization is promising from both a practical and theoretical point of view.
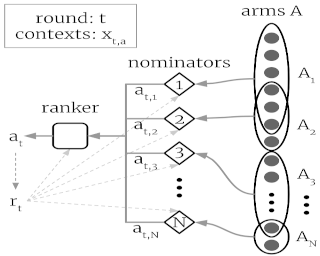

Attention maps are popular tools for explaining the decisions of convolutional neural networks (CNNs) for image classification. Typically, for each image of interest, a single attention map is produced, which assigns weights to pixels based on their importance to the classification. We argue that a single attention map provides an incomplete understanding since there are often many other maps that explain a classification equally well. In this paper, we propose to utilize a beam search algorithm to systematically search for multiple explanations for each image. Results show that there are indeed multiple relatively localized explanations for many images. However, naively showing multiple explanations to users can be overwhelming and does not reveal their common and distinct structures. We introduce structured attention graphs (SAGs), which compactly represent sets of attention maps for an image by visualizing how different combinations of image regions impact the confidence of a classifier. An approach to computing a compact and representative SAG for visualization is proposed via diverse sampling. We conduct a user study comparing the use of SAGs to traditional attention maps for answering comparative counterfactual questions about image classifications. Our results show that the users are significantly more accurate when presented with SAGs compared …
The cooperative bandit problem is increasingly becoming relevant due to its applications in large-scale decision-making. However, most research for this problem focuses exclusively on the setting with perfect communication, whereas in most real-world distributed settings, communication is often over stochastic networks, with arbitrary corruptions and delays. In this paper, we study cooperative bandit learning under three typical real-world communication scenarios, namely, (a) message-passing over stochastic time-varying networks, (b) instantaneous reward-sharing over a network with random delays, and (c) message-passing with adversarially corrupted rewards, including byzantine communication. For each of these environments, we propose decentralized algorithms that achieve competitive performance, along with near-optimal guarantees on the incurred group regret as well. Furthermore, in the setting with perfect communication, we present an improved delayed-update algorithm that outperforms the existing state-of-the-art on various network topologies. Finally, we present tight network-dependent minimax lower bounds on the group regret. Our proposed algorithms are straightforward to implement and obtain competitive empirical performance.
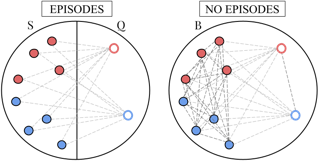
Episodic learning is a popular practice among researchers and practitioners interested in few-shot learning.It consists of organising training in a series of learning problems (or episodes), each divided into a small training and validation subset to mimic the circumstances encountered during evaluation.But is this always necessary?In this paper, we investigate the usefulness of episodic learning in methods which use nonparametric approaches, such as nearest neighbours, at the level of the episode.For these methods, we not only show how the constraints imposed by episodic learning are not necessary, but that they in fact lead to a data-inefficient way of exploiting training batches.We conduct a wide range of ablative experiments with Matching and Prototypical Networks, two of the most popular methods that use nonparametric approaches at the level of the episode.Their "non-episodic'' counterparts are considerably simpler, have less hyperparameters, and improve their performance in multiple few-shot classification datasets.

We present Cross-lingual Open-Retrieval Answer Generation (CORA), the first unified many-to-many question answering (QA) model that can answer questions across many languages, even for ones without language-specific annotated data or knowledge sources.We introduce a new dense passage retrieval algorithm that is trained to retrieve documents across languages for a question.Combined with a multilingual autoregressive generation model, CORA answers directly in the target language without any translation or in-language retrieval modules as used in prior work. We propose an iterative training method that automatically extends annotated data available only in high-resource languages to low-resource ones. Our results show that CORA substantially outperforms the previous state of the art on multilingual open QA benchmarks across 26 languages, 9 of which are unseen during training. Our analyses show the significance of cross-lingual retrieval and generation in many languages, particularly under low-resource settings.
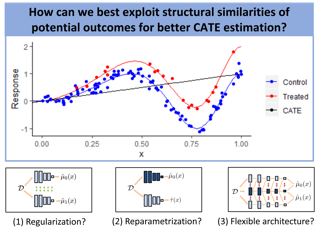
We investigate how to exploit structural similarities of an individual's potential outcomes (POs) under different treatments to obtain better estimates of conditional average treatment effects in finite samples. Especially when it is unknown whether a treatment has an effect at all, it is natural to hypothesize that the POs are similar -- yet, some existing strategies for treatment effect estimation employ regularization schemes that implicitly encourage heterogeneity even when it does not exist and fail to fully make use of shared structure. In this paper, we investigate and compare three end-to-end learning strategies to overcome this problem -- based on regularization, reparametrization and a flexible multi-task architecture -- each encoding inductive bias favoring shared behavior across POs. To build understanding of their relative strengths, we implement all strategies using neural networks and conduct a wide range of semi-synthetic experiments. We observe that all three approaches can lead to substantial improvements upon numerous baselines and gain insight into performance differences across various experimental settings.
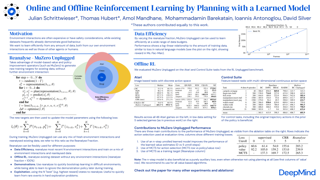
Learning efficiently from small amounts of data has long been the focus of model-based reinforcement learning, both for the online case when interacting with the environment, and the offline case when learning from a fixed dataset. However, to date no single unified algorithm could demonstrate state-of-the-art results for both settings.In this work, we describe the Reanalyse algorithm, which uses model-based policy and value improvement operators to compute improved training targets for existing data points, allowing for efficient learning at data budgets varying by several orders of magnitude. We further show that Reanalyse can also be used to learn completely without environment interactions, as in the case of Offline Reinforcement Learning (Offline RL). Combining Reanalyse with the MuZero algorithm, we introduce MuZero Unplugged, a single unified algorithm for any data budget, including Offline RL. In contrast to previous work, our algorithm requires no special adaptations for the off-policy or Offline RL settings. MuZero Unplugged sets new state-of-the-art results for Atari in the standard 200 million frame online setting as well as in the RL Unplugged Offline RL benchmark.
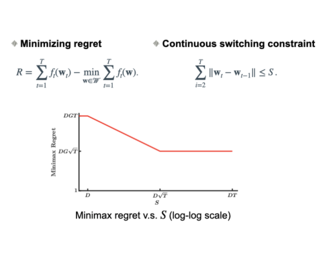
Identifying an effective model of a dynamical system from sensory data and using it for future state prediction and control is challenging. Recent data-driven algorithms based on Koopman theory are a promising approach to this problem, but they typically never update the model once it has been identified from a relatively small set of observation, thus making long-term prediction and control difficult for realistic systems, in robotics or fluid mechanics for example. This paper introduces a novel method for learning an embedding of the state space with linear dynamics from sensory data. Unlike previous approaches, the dynamics model can be updated online and thus easily applied to systems with non-linear dynamics in the original configuration space. The proposed approach is evaluated empirically on several classical dynamical systems and sensory modalities, with good performance on long-term prediction and control.
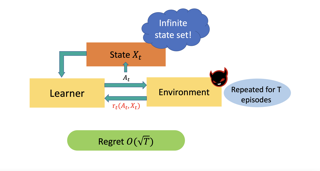
Motivated by sequential budgeted allocation problems, we investigate online matching problems where connections between vertices are not i.i.d., but they have fixed degree distributions -- the so-called configuration model. We estimate the competitive ratio of the simplest algorithm, GREEDY, by approximating some relevant stochastic discrete processes by their continuous counterparts, that are solutions of an explicit system of partial differential equations. This technique gives precise bounds on the estimation errors, with arbitrarily high probability as the problem size increases. In particular, it allows the formal comparison between different configuration models. We also prove that, quite surprisingly, GREEDY can have better performance guarantees than RANKING, another celebrated algorithm for online matching that usually outperforms the former.
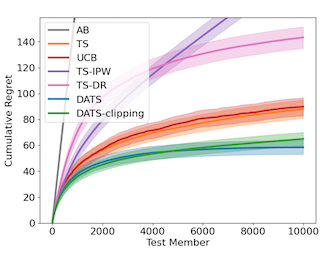
During online decision making in Multi-Armed Bandits (MAB), one needs to conduct inference on the true mean reward of each arm based on data collected so far at each step. However, since the arms are adaptively selected--thereby yielding non-iid data--conducting inference accurately is not straightforward. In particular, sample averaging, which is used in the family of UCB and Thompson sampling (TS) algorithms, does not provide a good choice as it suffers from bias and a lack of good statistical properties (e.g. asymptotic normality). Our thesis in this paper is that more sophisticated inference schemes that take into account the adaptive nature of the sequentially collected data can unlock further performance gains, even though both UCB and TS type algorithms are optimal in the worst case. In particular, we propose a variant of TS-style algorithms--which we call doubly adaptive TS--that leverages recent advances in causal inference and adaptively reweights the terms of a doubly robust estimator on the true mean reward of each arm. Through 20 synthetic domain experiments and a semi-synthetic experiment based on data from an A/B test of a web service, we demonstrate that using an adaptive inferential scheme (while still retaining the exploration efficacy of TS) provides …
In the fixed budget thresholding bandit problem, an algorithm sequentially allocates a budgeted number of samples to different distributions. It then predicts whether the mean of each distribution is larger or lower than a given threshold. We introduce a large family of algorithms (containing most existing relevant ones), inspired by the Frank-Wolfe algorithm, and provide a thorough yet generic analysis of their performance. This allowed us to construct new explicit algorithms, for a broad class of problems, whose losses are within a small constant factor of the non-adaptive oracle ones. Quite interestingly, we observed that adaptive methodsempirically greatly out-perform non-adaptive oracles, an uncommon behavior in standard online learning settings, such as regret minimization. We explain this surprising phenomenon on an insightful toy problem.
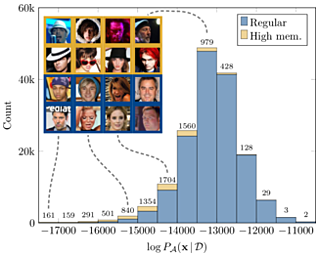
Recent advances in deep generative models have led to impressive results in a variety of application domains. Motivated by the possibility that deep learning models might memorize part of the input data, there have been increased efforts to understand how memorization arises. In this work, we extend a recently proposed measure of memorization for supervised learning (Feldman, 2019) to the unsupervised density estimation problem and adapt it to be more computationally efficient. Next, we present a study that demonstrates how memorization can occur in probabilistic deep generative models such as variational autoencoders. This reveals that the form of memorization to which these models are susceptible differs fundamentally from mode collapse and overfitting. Furthermore, we show that the proposed memorization score measures a phenomenon that is not captured by commonly-used nearest neighbor tests. Finally, we discuss several strategies that can be used to limit memorization in practice. Our work thus provides a framework for understanding problematic memorization in probabilistic generative models.
Vanilla models for object detection and instance segmentation suffer from the heavy bias toward detecting frequent objects in the long-tailed setting. Existing methods address this issue mostly during training, e.g., by re-sampling or re-weighting. In this paper, we investigate a largely overlooked approach --- post-processing calibration of confidence scores. We propose NorCal, Normalized Calibration for long-tailed object detection and instance segmentation, a simple and straightforward recipe that reweighs the predicted scores of each class by its training sample size. We show that separately handling the background class and normalizing the scores over classes for each proposal are keys to achieving superior performance. On the LVIS dataset, NorCal can effectively improve nearly all the baseline models not only on rare classes but also on common and frequent classes. Finally, we conduct extensive analysis and ablation studies to offer insights into various modeling choices and mechanisms of our approach. Our code is publicly available at https://github.com/tydpan/NorCal.
Meta-learning algorithms are widely used for few-shot learning. For example, image recognition systems that readily adapt to unseen classes after seeing only a few labeled examples. Despite their success, we show that modern meta-learning algorithms are extremely sensitive to the data used for adaptation, i.e. support data. In particular, we demonstrate the existence of (unaltered, in-distribution, natural) images that, when used for adaptation, yield accuracy as low as 4\% or as high as 95\% on standard few-shot image classification benchmarks. We explain our empirical findings in terms of class margins, which in turn suggests that robust and safe meta-learning requires larger margins than supervised learning.
The adversarial training is a popular tool to remedy the vulnerability of deep learning models against adversarial attacks, and there is rich theoretical literature on the training loss of adversarial training algorithms. In contrast, this paper studies the algorithmic stability of a generic adversarial training algorithm, which can further help to establish an upper bound for generalization error. By figuring out the stability upper bound and lower bound, we argue that the non-differentiability issue of adversarial training causes worse algorithmic stability than their natural counterparts. To tackle this problem, we consider a noise injection method. While the non-differentiability problem seriously affects the stability of adversarial training, injecting noise enables the training trajectory to avoid the occurrence of non-differentiability with dominating probability, hence enhancing the stability performance of adversarial training. Our analysis also studies the relation between the algorithm stability and numerical approximation error of adversarial attacks.
We consider stochastic optimization when one only has access to biased stochastic oracles of the objective, and obtaining stochastic gradients with low biases comes at high costs. This setting captures a variety of optimization paradigms widely used in machine learning, such as conditional stochastic optimization, bilevel optimization, and distributionally robust optimization. We examine a family of multi-level Monte Carlo (MLMC) gradient methods that exploit a delicate trade-off among the bias, the variance, and the oracle cost. We provide a systematic study of their convergences and total computation complexities for strongly convex, convex, and nonconvex objectives, and demonstrate their superiority over the naive biased stochastic gradient method. Moreover, when applied to conditional stochastic optimization, the MLMC gradient methods significantly improve the best-known sample complexity in the literature.
In this paper, we examine the convergence rate of a wide range of regularized methods for learning in games. To that end, we propose a unified algorithmic template that we call “follow the generalized leader” (FTGL), and which includes asspecial cases the canonical “follow the regularized leader” algorithm, its optimistic variants, extra-gradient schemes, and many others. The proposed framework is also sufficiently flexible to account for several different feedback models – fromfull information to bandit feedback. In this general setting, we show that FTGL algorithms converge locally to strict Nash equilibria at a rate which does not depend on the level of uncertainty faced by the players, but only on the geometry of the regularizer near the equilibrium. In particular, we show that algorithms based on entropic regularization – like the exponential weights algorithm – enjoy a linear convergence rate, while Euclidean projection methods converge to equilibrium in a finite number of iterations, even with bandit feedback.
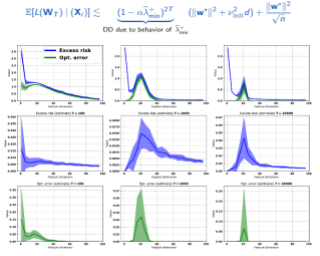
Empirically it has been observed that the performance of deep neural networks steadily improves with increased model size, contradicting the classical view on overfitting and generalization. Recently, the double descent phenomenon has been proposed to reconcile this observation with theory, suggesting that the test error has a second descent when the model becomes sufficiently overparameterized, as the model size itself acts as an implicit regularizer. In this paper we add to the growing body of work in this space, providing a careful study of learning dynamics as a function of model size for the least squares scenario. We show an excess risk bound for the gradient descent solution of the least squares objective. The bound depends on the smallest non-zero eigenvalue of the sample covariance matrix of the input features, via a functional form that has the double descent behaviour. This gives a new perspective on the double descent curves reported in the literature, as our analysis of the excess risk allows to decouple the effect of optimization and generalization error. In particular, we find that in the case of noiseless regression, double descent is explained solely by optimization-related quantities, which was missed in studies focusing on the Moore-Penrose pseudoinverse …
In this paper we consider Thompson Sampling for combinatorial semi-bandits. We demonstrate that, perhaps surprisingly, Thompson Sampling is sub-optimal for this problem in the sense that its regret scales exponentially in the ambient dimension, and its minimax regret scales almost linearly. This phenomenon occurs under a wide variety of assumptions including both non-linear and linear reward functions in the Bernoulli distribution setting. We also show that including a fixed amount of forced exploration to Thompson Sampling does not alleviate the problem. We complement our theoretical results with numerical results and show that in practice Thompson Sampling indeed can perform very poorly in some high dimension situations.
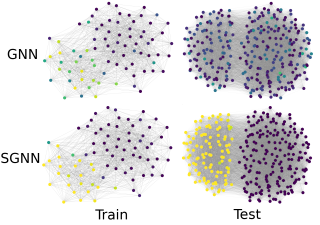
We study the approximation power of Graph Neural Networks (GNNs) on latent position random graphs. In the large graph limit, GNNs are known to converge to certain ``continuous'' models known as c-GNNs, which directly enables a study of their approximation power on random graph models. In the absence of input node features however, just as GNNs are limited by the Weisfeiler-Lehman isomorphism test, c-GNNs will be severely limited on simple random graph models. For instance, they will fail to distinguish the communities of a well-separated Stochastic Block Model (SBM) with constant degree function. Thus, we consider recently proposed architectures that augment GNNs with unique node identifiers, referred to as Structural GNNs here (SGNNs). We study the convergence of SGNNs to their continuous counterpart (c-SGNNs) in the large random graph limit, under new conditions on the node identifiers. We then show that c-SGNNs are strictly more powerful than c-GNNs in the continuous limit, and prove their universality on several random graph models of interest, including most SBMs and a large class of random geometric graphs. Our results cover both permutation-invariant and permutation-equivariant architectures.
Bandit problems with linear or concave reward have been extensively studied, but relatively few works have studied bandits with non-concave reward. This work considers a large family of bandit problems where the unknown underlying reward function is non-concave, including the low-rank generalized linear bandit problems and two-layer neural network with polynomial activation bandit problem.For the low-rank generalized linear bandit problem, we provide a minimax-optimal algorithm in the dimension, refuting both conjectures in \cite{lu2021low,jun2019bilinear}. Our algorithms are based on a unified zeroth-order optimization paradigm that applies in great generality and attains optimal rates in several structured polynomial settings (in the dimension). We further demonstrate the applicability of our algorithms in RL in the generative model setting, resulting in improved sample complexity over prior approaches.Finally, we show that the standard optimistic algorithms (e.g., UCB) are sub-optimal by dimension factors. In the neural net setting (with polynomial activation functions) with noiseless reward, we provide a bandit algorithm with sample complexity equal to the intrinsic algebraic dimension. Again, we show that optimistic approaches have worse sample complexity, polynomial in the extrinsic dimension (which could be exponentially worse in the polynomial degree).
Variational methods are extremely popular in the analysis of network data. Statistical guarantees obtained for these methods typically provide asymptotic normality for the problem of estimation of global model parameters under the stochastic block model. In the present work, we consider the case of networks with missing links that is important in application and show that the variational approximation to the maximum likelihood estimator converges at the minimax rate. This provides the first minimax optimal and tractable estimator for the problem of parameter estimation for the stochastic block model with missing links. We complement our results with numerical studies of simulated and real networks, which confirm the advantages of this estimator over current methods.
Some researchers speculate that intelligent reinforcement learning (RL) agents would be incentivized to seek resources and power in pursuit of the objectives we specify for them. Other researchers point out that RL agents need not have human-like power-seeking instincts. To clarify this discussion, we develop the first formal theory of the statistical tendencies of optimal policies. In the context of Markov decision processes, we prove that certain environmental symmetries are sufficient for optimal policies to tend to seek power over the environment. These symmetries exist in many environments in which the agent can be shut down or destroyed. We prove that in these environments, most reward functions make it optimal to seek power by keeping a range of options available and, when maximizing average reward, by navigating towards larger sets of potential terminal states.
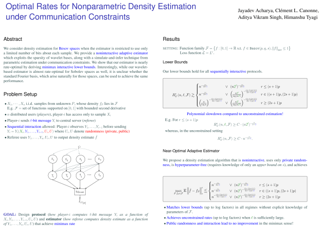
We consider density estimation for Besov spaces when the estimator is restricted to use only a limited number of bits about each sample. We provide a noninteractive adaptive estimator which exploits the sparsity of wavelet bases, along with a simulate-and-infer technique from parametric estimation under communication constraints. We show that our estimator is nearly rate-optimal by deriving minmax lower bounds that hold even when interactive protocols are allowed. Interestingly, while our wavelet-based estimator is almost rate-optimal for Sobolev spaces as well, it is unclear whether the standard Fourier basis, which arise naturally for those spaces, can be used to achieve the same performance.
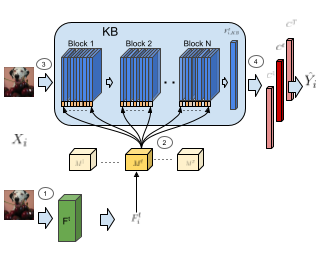
When learning tasks over time, artificial neural networks suffer from a problem known as Catastrophic Forgetting (CF). This happens when the weights of a network are overwritten during the training of a new task causing forgetting of old information. To address this issue, we propose MetA Reusable Knowledge or MARK, a new method that fosters weight reusability instead of overwriting when learning a new task. Specifically, MARK keeps a set of shared weights among tasks. We envision these shared weights as a common Knowledge Base (KB) that is not only used to learn new tasks, but also enriched with new knowledge as the model learns new tasks. Key components behind MARK are two-fold. On the one hand, a metalearning approach provides the key mechanism to incrementally enrich the KB with new knowledge and to foster weight reusability among tasks. On the other hand, a set of trainable masks provides the key mechanism to selectively choose from the KB relevant weights to solve each task. By using MARK, we achieve state of the art results in several popular benchmarks, surpassing the best performing methods in terms of average accuracy by over 10% on the 20-Split-MiniImageNet dataset, while achieving almost zero forgetfulness …
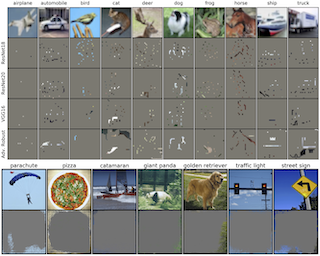
Image classifiers are typically scored on their test set accuracy, but high accuracy can mask a subtle type of model failure. We find that high scoring convolutional neural networks (CNNs) on popular benchmarks exhibit troubling pathologies that allow them to display high accuracy even in the absence of semantically salient features. When a model provides a high-confidence decision without salient supporting input features, we say the classifier has overinterpreted its input, finding too much class-evidence in patterns that appear nonsensical to humans. Here, we demonstrate that neural networks trained on CIFAR-10 and ImageNet suffer from overinterpretation, and we find models on CIFAR-10 make confident predictions even when 95% of input images are masked and humans cannot discern salient features in the remaining pixel-subsets. We introduce Batched Gradient SIS, a new method for discovering sufficient input subsets for complex datasets, and use this method to show the sufficiency of border pixels in ImageNet for training and testing. Although these patterns portend potential model fragility in real-world deployment, they are in fact valid statistical patterns of the benchmark that alone suffice to attain high test accuracy. Unlike adversarial examples, overinterpretation relies upon unmodified image pixels. We find ensembling and input dropout can …

Richly segmented 3D scene reconstructions are an integral basis for many high-level scene understanding tasks, such as for robotics, motion planning, or augmented reality. Existing works in 3D perception from a single RGB image tend to focus on geometric reconstruction only, or geometric reconstruction with semantic segmentation or instance segmentation.Inspired by 2D panoptic segmentation, we propose to unify the tasks of geometric reconstruction, 3D semantic segmentation, and 3D instance segmentation into the task of panoptic 3D scene reconstruction -- from a single RGB image, predicting the complete geometric reconstruction of the scene in the camera frustum of the image, along with semantic and instance segmentations.We propose a new approach for holistic 3D scene understanding from a single RGB image which learns to lift and propagate 2D features from an input image to a 3D volumetric scene representation.Our panoptic 3D reconstruction metric evaluates both geometric reconstruction quality as well as panoptic segmentation.Our experiments demonstrate that our approach for panoptic 3D scene reconstruction outperforms alternative approaches for this task.
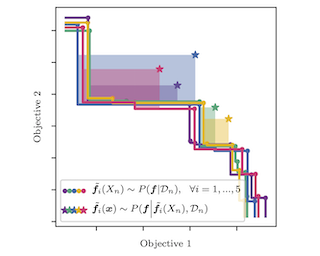
Optimizing multiple competing black-box objectives is a challenging problem in many fields, including science, engineering, and machine learning. Multi-objective Bayesian optimization (MOBO) is a sample-efficient approach for identifying the optimal trade-offs between the objectives. However, many existing methods perform poorly when the observations are corrupted by noise. We propose a novel acquisition function, NEHVI, that overcomes this important practical limitation by applying a Bayesian treatment to the popular expected hypervolume improvement (EHVI) criterion and integrating over this uncertainty in the Pareto frontier. We argue that, even in the noiseless setting, generating multiple candidates in parallel is an incarnation of EHVI with uncertainty in the Pareto frontier and therefore can be addressed using the same underlying technique. Through this lens, we derive a natural parallel variant, qNEHVI, that reduces computational complexity of parallel EHVI from exponential to polynomial with respect to the batch size. qNEHVI is one-step Bayes-optimal for hypervolume maximization in both noisy and noiseless environments, and we show that it can be optimized effectively with gradient-based methods via sample average approximation. Empirically, we demonstrate not only that qNEHVI is substantially more robust to observation noise than existing MOBO approaches, but also that it achieves state-of-the-art optimization performance and competitive …
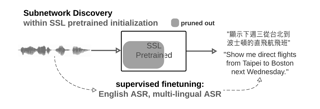
Self-supervised speech representation learning (speech SSL) has demonstrated the benefit of scale in learning rich representations for Automatic Speech Recognition (ASR) with limited paired data, such as wav2vec 2.0. We investigate the existence of sparse subnetworks in pre-trained speech SSL models that achieve even better low-resource ASR results. However, directly applying widely adopted pruning methods such as the Lottery Ticket Hypothesis (LTH) is suboptimal in the computational cost needed. Moreover, we show that the discovered subnetworks yield minimal performance gain compared to the original dense network.We present Prune-Adjust-Re-Prune (PARP), which discovers and finetunes subnetworks for much better performance, while only requiring a single downstream ASR finetuning run. PARP is inspired by our surprising observation that subnetworks pruned for pre-training tasks need merely a slight adjustment to achieve a sizeable performance boost in downstream ASR tasks. Extensive experiments on low-resource ASR verify (1) sparse subnetworks exist in mono-lingual/multi-lingual pre-trained speech SSL, and (2) the computational advantage and performance gain of PARP over baseline pruning methods.In particular, on the 10min Librispeech split without LM decoding, PARP discovers subnetworks from wav2vec 2.0 with an absolute 10.9%/12.6% WER decrease compared to the full model. We further demonstrate the effectiveness of PARP via: cross-lingual pruning …
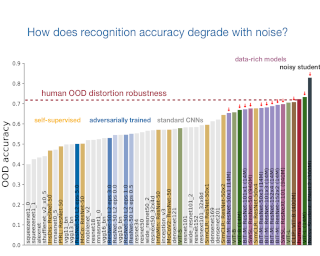
A few years ago, the first CNN surpassed human performance on ImageNet. However, it soon became clear that machines lack robustness on more challenging test cases, a major obstacle towards deploying machines "in the wild" and towards obtaining better computational models of human visual perception. Here we ask: Are we making progress in closing the gap between human and machine vision? To answer this question, we tested human observers on a broad range of out-of-distribution (OOD) datasets, recording 85,120 psychophysical trials across 90 participants. We then investigated a range of promising machine learning developments that crucially deviate from standard supervised CNNs along three axes: objective function (self-supervised, adversarially trained, CLIP language-image training), architecture (e.g. vision transformers), and dataset size (ranging from 1M to 1B).Our findings are threefold. (1.) The longstanding distortion robustness gap between humans and CNNs is closing, with the best models now exceeding human feedforward performance on most of the investigated OOD datasets. (2.) There is still a substantial image-level consistency gap, meaning that humans make different errors than models. In contrast, most models systematically agree in their categorisation errors, even substantially different ones like contrastive self-supervised vs. standard supervised models. (3.) In many cases, human-to-model consistency improves …
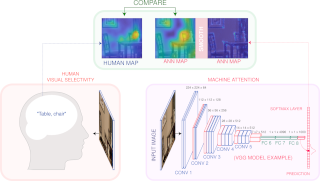
Developments in machine learning interpretability techniques over the past decade have provided new tools to observe the image regions that are most informative for classification and localization in artificial neural networks (ANNs). Are the same regions similarly informative to human observers? Using data from 79 new experiments and 7,810 participants, we show that passive attention techniques reveal a significant overlap with human visual selectivity estimates derived from 6 distinct behavioral tasks including visual discrimination, spatial localization, recognizability, free-viewing, cued-object search, and saliency search fixations. We find that input visualizations derived from relatively simple ANN architectures probed using guided backpropagation methods are the best predictors of a shared component in the joint variability of the human measures. We validate these correlational results with causal manipulations using recognition experiments. We show that images masked with ANN attention maps were easier for humans to classify than control masks in a speeded recognition experiment. Similarly, we find that recognition performance in the same ANN models was likewise influenced by masking input images using human visual selectivity maps. This work contributes a new approach to evaluating the biological and psychological validity of leading ANNs as models of human vision: by examining their similarities and differences …
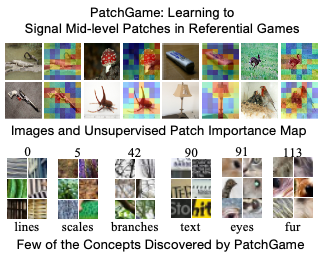
We study a referential game (a type of signaling game) where two agents communicate with each other via a discrete bottleneck to achieve a common goal. In our referential game, the goal of the speaker is to compose a message or a symbolic representation of "important" image patches, while the task for the listener is to match the speaker's message to a different view of the same image. We show that it is indeed possible for the two agents to develop a communication protocol without explicit or implicit supervision. We further investigate the developed protocol and show the applications in speeding up recent Vision Transformers by using only important patches, and as pre-training for downstream recognition tasks (e.g., classification).
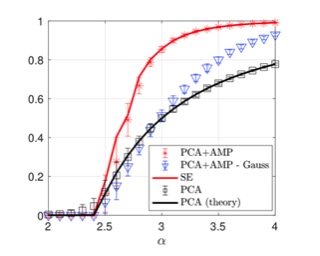
We study the problem of estimating a rank-1 signal in the presence of rotationally invariant noise--a class of perturbations more general than Gaussian noise. Principal Component Analysis (PCA) provides a natural estimator, and sharp results on its performance have been obtained in the high-dimensional regime. Recently, an Approximate Message Passing (AMP) algorithm has been proposed as an alternative estimator with the potential to improve the accuracy of PCA. However, the existing analysis of AMP requires an initialization that is both correlated with the signal and independent of the noise, which is often unrealistic in practice. In this work, we combine the two methods, and propose to initialize AMP with PCA. Our main result is a rigorous asymptotic characterization of the performance of this estimator. Both the AMP algorithm and its analysis differ from those previously derived in the Gaussian setting: at every iteration, our AMP algorithm requires a specific term to account for PCA initialization, while in the Gaussian case, PCA initialization affects only the first iteration of AMP. The proof is based on a two-phase artificial AMP that first approximates the PCA estimator and then mimics the true AMP. Our numerical simulations show an excellent agreement between AMP results …

Machine learning advances in the last decade have relied significantly on large-scale datasets that continue to grow in size. Increasingly, those datasets also contain different data modalities. However, large multi-modal datasets are hard to annotate, and annotations may contain biases that we are often unaware of. Deep-net-based classifiers, in turn, are prone to exploit those biases and to find shortcuts. To study and quantify this concern, we introduce the perceptual score, a metric that assesses the degree to which a model relies on the different subsets of the input features, i.e., modalities. Using the perceptual score, we find a surprisingly consistent trend across four popular datasets: recent, more accurate state-of-the-art multi-modal models for visual question-answering or visual dialog tend to perceive the visual data less than their predecessors. This is concerning as answers are hence increasingly inferred from textual cues only. Using the perceptual score also helps to analyze model biases by decomposing the score into data subset contributions. We hope to spur a discussion on the perceptiveness of multi-modal models and also hope to encourage the community working on multi-modal classifiers to start quantifying perceptiveness via the proposed perceptual score.
We consider offline reinforcement learning (RL) with heterogeneous agents under severe data scarcity, i.e., we only observe a single historical trajectory for every agent under an unknown, potentially sub-optimal policy. We find that the performance of state-of-the-art offline and model-based RL methods degrade significantly given such limited data availability, even for commonly perceived "solved" benchmark settings such as "MountainCar" and "CartPole". To address this challenge, we propose PerSim, a model-based offline RL approach which first learns a personalized simulator for each agent by collectively using the historical trajectories across all agents, prior to learning a policy. We do so by positing that the transition dynamics across agents can be represented as a latent function of latent factors associated with agents, states, and actions; subsequently, we theoretically establish that this function is well-approximated by a "low-rank" decomposition of separable agent, state, and action latent functions. This representation suggests a simple, regularized neural network architecture to effectively learn the transition dynamics per agent, even with scarce, offline data. We perform extensive experiments across several benchmark environments and RL methods. The consistent improvement of our approach, measured in terms of both state dynamics prediction and eventual reward, confirms the efficacy of our framework …
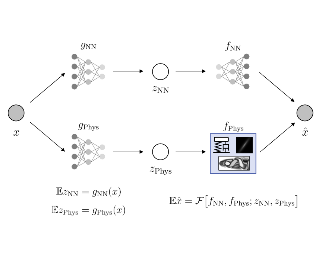
Integrating physics models within machine learning models holds considerable promise toward learning robust models with improved interpretability and abilities to extrapolate. In this work, we focus on the integration of incomplete physics models into deep generative models. In particular, we introduce an architecture of variational autoencoders (VAEs) in which a part of the latent space is grounded by physics. A key technical challenge is to strike a balance between the incomplete physics and trainable components such as neural networks for ensuring that the physics part is used in a meaningful manner. To this end, we propose a regularized learning method that controls the effect of the trainable components and preserves the semantics of the physics-based latent variables as intended. We not only demonstrate generative performance improvements over a set of synthetic and real-world datasets, but we also show that we learn robust models that can consistently extrapolate beyond the training distribution in a meaningful manner. Moreover, we show that we can control the generative process in an interpretable manner.
The rapid increase in sizes of state-of-the-art DNN models, and consequently the increase in the compute and memory requirements of model training, has led to the development of many execution schemes such as data parallelism, pipeline model parallelism, tensor (intra-layer) model parallelism, and various memory-saving optimizations. However, no prior work has tackled the highly complex problem of optimally partitioning the DNN computation graph across many accelerators while combining all these parallelism modes and optimizations.In this work, we introduce Piper, an efficient optimization algorithm for this problem that is based on a two-level dynamic programming approach. Our two-level approach is driven by the insight that being given tensor-parallelization techniques for individual layers (e.g., Megatron-LM's splits for transformer layers) significantly reduces the search space and makes the global problem tractable, compared to considering tensor-parallel configurations for the entire DNN operator graph.
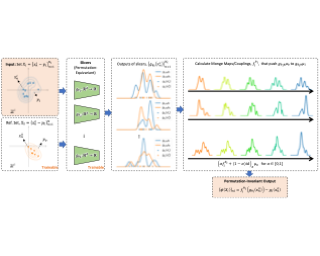
Learning representations from sets has become increasingly important with many applications in point cloud processing, graph learning, image/video recognition, and object detection. We introduce a geometrically-interpretable and generic pooling mechanism for aggregating a set of features into a fixed-dimensional representation. In particular, we treat elements of a set as samples from a probability distribution and propose an end-to-end trainable Euclidean embedding for sliced-Wasserstein distance to learn from set-structured data effectively. We evaluate our proposed pooling method on a wide variety of set-structured data, including point-cloud, graph, and image classification tasks, and demonstrate that our proposed method provides superior performance over existing set representation learning approaches. Our code is available at https://github.com/navid-naderi/PSWE.
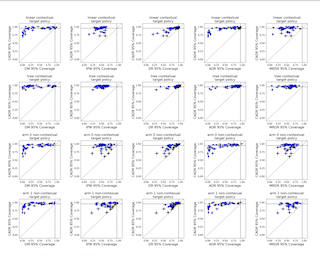
Contextual bandit algorithms are increasingly replacing non-adaptive A/B tests in e-commerce, healthcare, and policymaking because they can both improve outcomes for study participants and increase the chance of identifying good or even best policies. To support credible inference on novel interventions at the end of the study, nonetheless, we still want to construct valid confidence intervals on average treatment effects, subgroup effects, or value of new policies. The adaptive nature of the data collected by contextual bandit algorithms, however, makes this difficult: standard estimators are no longer asymptotically normally distributed and classic confidence intervals fail to provide correct coverage. While this has been addressed in non-contextual settings by using stabilized estimators, variance stabilized estimators in the contextual setting pose unique challenges that we tackle for the first time in this paper. We propose the Contextual Adaptive Doubly Robust (CADR) estimator, a novel estimator for policy value that is asymptotically normal under contextual adaptive data collection. The main technical challenge in constructing CADR is designing adaptive and consistent conditional standard deviation estimators for stabilization. Extensive numerical experiments using 57 OpenML datasets demonstrate that confidence intervals based on CADR uniquely provide correct coverage.
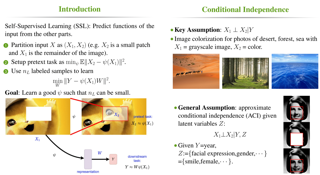
Self-supervised representation learning solves auxiliary prediction tasks (known as pretext tasks), that do not require labeled data, to learn semantic representations. These pretext tasks are created solely using the input features, such as predicting a missing image patch, recovering the color channels of an image from context, or predicting missing words, yet predicting this \textit{known} information helps in learning representations effective for downstream prediction tasks. This paper posits a mechanism based on approximate conditional independence to formalize how solving certain pretext tasks can learn representations that provably decrease the sample complexity of downstream supervised tasks. Formally, we quantify how the approximate independence between the components of the pretext task (conditional on the label and latent variables) allows us to learn representations that can solve the downstream task with drastically reduced sample complexity by just training a linear layer on top of the learned representation.
Deep neural networks excel at image classification, but their performance is far less robust to input perturbations than human perception. In this work we explore whether this shortcoming may be partly addressed by incorporating brain-inspired recurrent dynamics in deep convolutional networks. We take inspiration from a popular framework in neuroscience: "predictive coding". At each layer of the hierarchical model, generative feedback "predicts" (i.e., reconstructs) the pattern of activity in the previous layer. The reconstruction errors are used to iteratively update the network’s representations across timesteps, and to optimize the network's feedback weights over the natural image dataset--a form of unsupervised training. We show that implementing this strategy into two popular networks, VGG16 and EfficientNetB0, improves their robustness against various corruptions and adversarial attacks. We hypothesize that other feedforward networks could similarly benefit from the proposed framework. To promote research in this direction, we provide an open-sourced PyTorch-based package called \textit{Predify}, which can be used to implement and investigate the impacts of the predictive coding dynamics in any convolutional neural network.
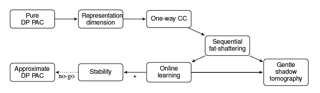
Learning an unknown n-qubit quantum state rho is a fundamental challenge in quantum computing. Information-theoretically, it is known that tomography requires exponential in n many copies of rho to estimate its entries. Motivated by learning theory, Aaronson et al. introduced many (weaker) learning models: the PAC model of learning states (Proceedings of Royal Society A'07), shadow tomography (STOC'18) for learning shadows" of a state, a model that also requires learners to be differentially private (STOC'19) and the online model of learning states (NeurIPS'18). In these models it was shown that an unknown state can be learnedapproximately" using linear in n many copies of rho. But is there any relationship between these models? In this paper we prove a sequence of (information-theoretic) implications from differentially-private PAC learning to online learning and then to quantum stability.Our main result generalizes the recent work of Bun, Livni and Moran (Journal of the ACM'21) who showed that finite Littlestone dimension (of Boolean-valued concept classes) implies PAC learnability in the (approximate) differentially private (DP) setting. We first consider their work in the real-valued setting and further extend to their techniques to the setting of learning quantum states. Key to our results is our generic quantum …
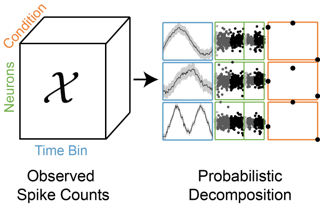
The firing of neural populations is coordinated across cells, in time, and across experimentalconditions or repeated experimental trials; and so a full understanding of the computationalsignificance of neural responses must be based on a separation of these different contributions tostructured activity.Tensor decomposition is an approach to untangling the influence of multiple factors in data that iscommon in many fields. However, despite some recent interest in neuroscience, wider applicabilityof the approach is hampered by the lack of a full probabilistic treatment allowing principledinference of a decomposition from non-Gaussian spike-count data.Here, we extend the Pólya-Gamma (PG) augmentation, previously used in sampling-based Bayesianinference, to implement scalable variational inference in non-conjugate spike-count models.Using this new approach, we develop techniques related to automatic relevance determination to inferthe most appropriate tensor rank, as well as to incorporate priors based on known brain anatomy suchas the segregation of cell response properties by brain area.We apply the model to neural recordings taken under conditions of visual-vestibular sensoryintegration, revealing how the encoding of self- and visual-motion signals is modulated by thesensory information available to the animal.
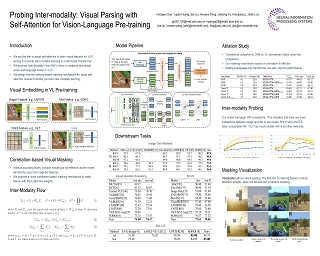
Vision-Language Pre-training (VLP) aims to learn multi-modal representations from image-text pairs and serves for downstream vision-language tasks in a fine-tuning fashion. The dominant VLP models adopt a CNN-Transformer architecture, which embeds images with a CNN, and then aligns images and text with a Transformer. Visual relationship between visual contents plays an important role in image understanding and is the basic for inter-modal alignment learning. However, CNNs have limitations in visual relation learning due to local receptive field's weakness in modeling long-range dependencies. Thus the two objectives of learning visual relation and inter-modal alignment are encapsulated in the same Transformer network. Such design might restrict the inter-modal alignment learning in the Transformer by ignoring the specialized characteristic of each objective. To tackle this, we propose a fully Transformer visual embedding for VLP to better learn visual relation and further promote inter-modal alignment. Specifically, we propose a metric named Inter-Modality Flow (IMF) to measure the interaction between vision and language modalities (i.e., inter-modality). We also design a novel masking optimization mechanism named Masked Feature Regression (MFR) in Transformer to further promote the inter-modality learning. To the best of our knowledge, this is the first study to explore the benefit of Transformer for …
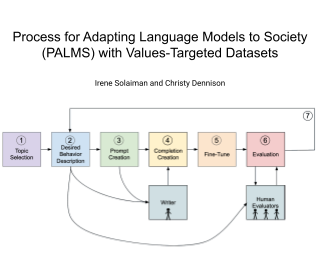
Language models can generate harmful and biased outputs and exhibit undesirable behavior according to a given cultural context. We propose a Process for Adapting Language Models to Society (PALMS) with Values-Targeted Datasets, an iterative process to significantly change model behavior by crafting and fine-tuning on a dataset that reflects a predetermined set of target values. We evaluate our process using three metrics: quantitative metrics with human evaluations that score output adherence to a target value, toxicity scoring on outputs; and qualitative metrics analyzing the most common word associated with a given social category. Through each iteration, we add additional training dataset examples based on observed shortcomings from evaluations. PALMS performs significantly better on all metrics compared to baseline and control models for a broad range of GPT-3 language model sizes without compromising capability integrity. We find that the effectiveness of PALMS increases with model size. We show that significantly adjusting language model behavior is feasible with a small, hand-curated dataset.

Generative Adversarial Networks (GANs) produce high-quality images but are challenging to train. They need careful regularization, vast amounts of compute, and expensive hyper-parameter sweeps. We make significant headway on these issues by projecting generated and real samples into a fixed, pretrained feature space. Motivated by the finding that the discriminator cannot fully exploit features from deeper layers of the pretrained model, we propose a more effective strategy that mixes features across channels and resolutions. Our Projected GAN improves image quality, sample efficiency, and convergence speed. It is further compatible with resolutions of up to one Megapixel and advances the state-of-the-art Fréchet Inception Distance (FID) on twenty-two benchmark datasets. Importantly, Projected GANs match the previously lowest FIDs up to 40 times faster, cutting the wall-clock time from 5 days to less than 3 hours given the same computational resources.
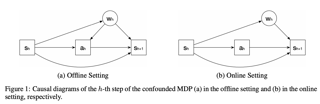
Empowered by neural networks, deep reinforcement learning (DRL) achieves tremendous empirical success. However, DRL requires a large dataset by interacting with the environment, which is unrealistic in critical scenarios such as autonomous driving and personalized medicine. In this paper, we study how to incorporate the dataset collected in the offline setting to improve the sample efficiency in the online setting. To incorporate the observational data, we face two challenges. (a) The behavior policy that generates the observational data may depend on unobserved random variables (confounders), which affect the received rewards and transition dynamics. (b) Exploration in the online setting requires quantifying the uncertainty given both the observational and interventional data. To tackle such challenges, we propose the deconfounded optimistic value iteration (DOVI) algorithm, which incorporates the confounded observational data in a provably efficient manner. DOVI explicitly adjusts for the confounding bias in the observational data, where the confounders are partially observed or unobserved. In both cases, such adjustments allow us to construct the bonus based on a notion of information gain, which takes into account the amount of information acquired from the offline setting. In particular, we prove that the regret of DOVI is smaller than the optimal regret achievable …
It is a commonly held belief that enforcing invariance improves generalisation. Although this approach enjoys widespread popularity, it is only very recently that a rigorous theoretical demonstration of this benefit has been established. In this work we build on the function space perspective of Elesedy and Zaidi [8] to derive a strictly non-zero generalisation benefit of incorporating invariance in kernel ridge regression when the target is invariant to the action of a compact group. We study invariance enforced by feature averaging and find that generalisation is governed by a notion of effective dimension that arises from the interplay between the kernel and the group. In building towards this result, we find that the action of the group induces an orthogonal decomposition of both the reproducing kernel Hilbert space and its kernel, which may be of interest in its own right.
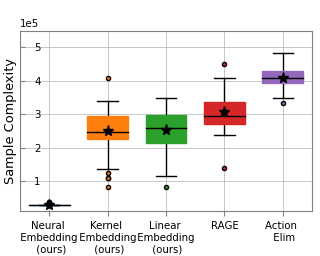
We study pure exploration in bandits, where the dimension of the feature representation can be much larger than the number of arms. To overcome the curse of dimensionality, we propose to adaptively embed the feature representation of each arm into a lower-dimensional space and carefully deal with the induced model misspecifications. Our approach is conceptually very different from existing works that can either only handle low-dimensional linear bandits or passively deal with model misspecifications. We showcase the application of our approach to two pure exploration settings that were previously under-studied: (1) the reward function belongs to a possibly infinite-dimensional Reproducing Kernel Hilbert Space, and (2) the reward function is nonlinear and can be approximated by neural networks. Our main results provide sample complexity guarantees that only depend on the effective dimension of the feature spaces in the kernel or neural representations. Extensive experiments conducted on both synthetic and real-world datasets demonstrate the efficacy of our methods.
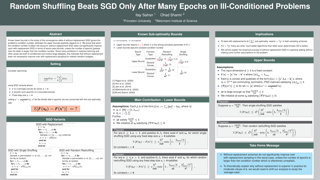
Recently, there has been much interest in studying the convergence rates of without-replacement SGD, and proving that it is faster than with-replacement SGD in the worst case. However, known lower bounds ignore the problem's geometry, including its condition number, whereas the upper bounds explicitly depend on it. Perhaps surprisingly, we prove that when the condition number is taken into account, without-replacement SGD \emph{does not} significantly improve on with-replacement SGD in terms of worst-case bounds, unless the number of epochs (passes over the data) is larger than the condition number. Since many problems in machine learning and other areas are both ill-conditioned and involve large datasets, this indicates that without-replacement does not necessarily improve over with-replacement sampling for realistic iteration budgets. We show this by providing new lower and upper bounds which are tight (up to log factors), for quadratic problems with commuting quadratic terms, precisely quantifying the dependence on the problem parameters.
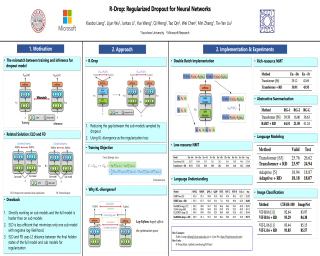
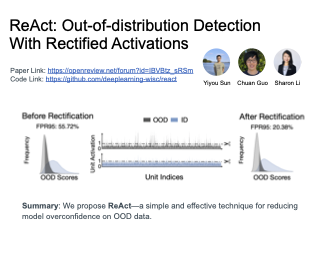
Out-of-distribution (OOD) detection has received much attention lately due to its practical importance in enhancing the safe deployment of neural networks. One of the primary challenges is that models often produce highly confident predictions on OOD data, which undermines the driving principle in OOD detection that the model should only be confident about in-distribution samples. In this work, we propose ReAct—a simple and effective technique for reducing model overconfidence on OOD data. Our method is motivated by novel analysis on internal activations of neural networks, which displays highly distinctive signature patterns for OOD distributions. Our method can generalize effectively to different network architectures and different OOD detection scores. We empirically demonstrate that ReAct achieves competitive detection performance on a comprehensive suite of benchmark datasets, and give theoretical explication for our method’s efficacy. On the ImageNet benchmark, ReAct reduces the false positive rate (FPR95) by 25.05% compared to the previous best method.
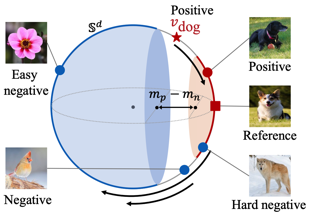
Conditional Generative Adversarial Networks (cGAN) generate realistic images by incorporating class information into GAN. While one of the most popular cGANs is an auxiliary classifier GAN with softmax cross-entropy loss (ACGAN), it is widely known that training ACGAN is challenging as the number of classes in the dataset increases. ACGAN also tends to generate easily classifiable samples with a lack of diversity. In this paper, we introduce two cures for ACGAN. First, we identify that gradient exploding in the classifier can cause an undesirable collapse in early training, and projecting input vectors onto a unit hypersphere can resolve the problem. Second, we propose the Data-to-Data Cross-Entropy loss (D2D-CE) to exploit relational information in the class-labeled dataset. On this foundation, we propose the Rebooted Auxiliary Classifier Generative Adversarial Network (ReACGAN). The experimental results show that ReACGAN achieves state-of-the-art generation results on CIFAR10, Tiny-ImageNet, CUB200, and ImageNet datasets. We also verify that ReACGAN benefits from differentiable augmentations and that D2D-CE harmonizes with StyleGAN2 architecture. Model weights and a software package that provides implementations of representative cGANs and all experiments in our paper are available at https://github.com/POSTECH-CVLab/PyTorch-StudioGAN.
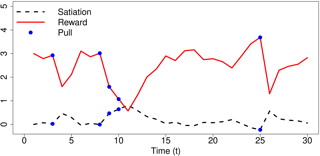
Psychological research shows that enjoyment of many goods is subject to satiation, with short-term satisfaction declining after repeated exposures to the same item. Nevertheless, proposed algorithms for powering recommender systems seldom model these dynamics, instead proceeding as though user preferences were fixed in time. In this work, we introduce rebounding bandits, a multi-armed bandit setup, where satiation dynamics are modeled as time-invariant linear dynamical systems. Expected rewards for each arm decline monotonically with consecutive exposures and rebound towards the initial reward whenever that arm is not pulled. Unlike classical bandit algorithms, methods for tackling rebounding bandits must plan ahead and model-based methods rely on estimating the parameters of the satiation dynamics. We characterize the planning problem, showing that the greedy policy is optimal when the arms exhibit identical deterministic dynamics. To address stochastic satiation dynamics with unknown parameters, we propose Explore-Estimate-Plan, an algorithm that pulls arms methodically, estimates the system dynamics, and then plans accordingly.
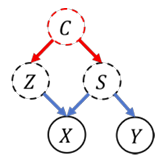
Distributional shifts between training and target domains may degrade the prediction accuracy of learned models, mainly because these models often learn features that possess only correlation rather than causal relation with the output. Such a correlation, which is known as ``spurious correlation'' statistically, is domain-dependent hence may fail to generalize to unseen domains. To avoid such a spurious correlation, we propose \textbf{La}tent \textbf{C}ausal \textbf{I}nvariance \textbf{M}odels (LaCIM) that specifies the underlying causal structure of the data and the source of distributional shifts, guiding us to pursue only causal factor for prediction. Specifically, the LaCIM introduces a pair of correlated latent factors: (a) causal factor and (b) others, while the extent of this correlation is governed by a domain variable that characterizes the distributional shifts. On the basis of this, we prove that the distribution of observed variables conditioning on latent variables is shift-invariant. Equipped with such an invariance, we prove that the causal factor can be recovered without mixing information from others, which induces the ground-truth predicting mechanism. We propose a Variational-Bayesian-based method to learn this invariance for prediction. The utility of our approach is verified by improved generalization to distributional shifts on various real-world data. Our code is freely available …
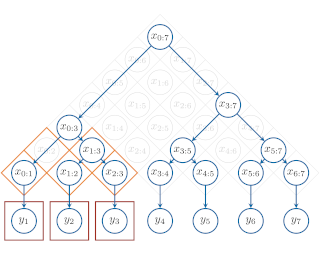
Probabilistic context-free grammars (PCFGs) and dynamic Bayesian networks (DBNs) are widely used sequence models with complementary strengths and limitations. While PCFGs allow for nested hierarchical dependencies (tree structures), their latent variables (non-terminal symbols) have to be discrete. In contrast, DBNs allow for continuous latent variables, but the dependencies are strictly sequential (chain structure). Therefore, neither can be applied if the latent variables are assumed to be continuous and also to have a nested hierarchical dependency structure. In this paper, we present Recursive Bayesian Networks (RBNs), which generalise and unify PCFGs and DBNs, combining their strengths and containing both as special cases. RBNs define a joint distribution over tree-structured Bayesian networks with discrete or continuous latent variables. The main challenge lies in performing joint inference over the exponential number of possible structures and the continuous variables. We provide two solutions: 1) For arbitrary RBNs, we generalise inside and outside probabilities from PCFGs to the mixed discrete-continuous case, which allows for maximum posterior estimates of the continuous latent variables via gradient descent, while marginalising over network structures. 2) For Gaussian RBNs, we additionally derive an analytic approximation of the marginal data likelihood (evidence) and marginal posterior distribution, allowing for robust parameter optimisation …
We consider the problem of learning the causal MAG of a system from observational data in the presence of latent variables and selection bias. Constraint-based methods are one of the main approaches for solving this problem, but the existing methods are either computationally impractical when dealing with large graphs or lacking completeness guarantees. We propose a novel computationally efficient recursive constraint-based method that is sound and complete. The key idea of our approach is that at each iteration a specific type of variable is identified and removed. This allows us to learn the structure efficiently and recursively, as this technique reduces both the number of required conditional independence (CI) tests and the size of the conditioning sets. The former substantially reduces the computational complexity, while the latter results in more reliable CI tests. We provide an upper bound on the number of required CI tests in the worst case. To the best of our knowledge, this is the tightest bound in the literature. We further provide a lower bound on the number of CI tests required by any constraint-based method. The upper bound of our proposed approach and the lower bound at most differ by a factor equal to the …
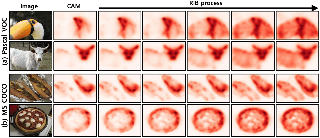
Weakly supervised semantic segmentation produces pixel-level localization from class labels; however, a classifier trained on such labels is likely to focus on a small discriminative region of the target object. We interpret this phenomenon using the information bottleneck principle: the final layer of a deep neural network, activated by the sigmoid or softmax activation functions, causes an information bottleneck, and as a result, only a subset of the task-relevant information is passed on to the output. We first support this argument through a simulated toy experiment and then propose a method to reduce the information bottleneck by removing the last activation function. In addition, we introduce a new pooling method that further encourages the transmission of information from non-discriminative regions to the classification. Our experimental evaluations demonstrate that this simple modification significantly improves the quality of localization maps on both the PASCAL VOC 2012 and MS COCO 2014 datasets, exhibiting a new state-of-the-art performance for weakly supervised semantic segmentation.
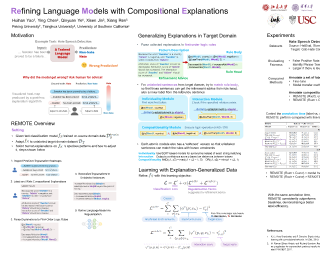
Pre-trained language models have been successful on text classification tasks, but are prone to learning spurious correlations from biased datasets, and are thus vulnerable when making inferences in a new domain. Prior work reveals such spurious patterns via post-hoc explanation algorithms which compute the importance of input features. Further, the model is regularized to align the importance scores with human knowledge, so that the unintended model behaviors are eliminated. However, such a regularization technique lacks flexibility and coverage, since only importance scores towards a pre-defined list of features are adjusted, while more complex human knowledge such as feature interaction and pattern generalization can hardly be incorporated. In this work, we propose to refine a learned language model for a target domain by collecting human-provided compositional explanations regarding observed biases. By parsing these explanations into executable logic rules, the human-specified refinement advice from a small set of explanations can be generalized to more training examples. We additionally introduce a regularization term allowing adjustments for both importance and interaction of features to better rectify model behavior. We demonstrate the effectiveness of the proposed approach on two text classification tasks by showing improved performance in target domain as well as improved model fairness …
The goal of zero-shot action recognition (ZSAR) is to classify action classes which were not previously seen during training. Traditionally, this is achieved by training a network to map, or regress, visual inputs to a semantic space where a nearest neighbor classifier is used to select the closest target class. We argue that this approach is sub-optimal due to the use of nearest neighbor on static semantic space and is ineffective when faced with multi-label videos - where two semantically distinct co-occurring action categories cannot be predicted with high confidence. To overcome these limitations, we propose a ZSAR framework which does not rely on nearest neighbor classification, but rather consists of a pairwise scoring function. Given a video and a set of action classes, our method predicts a set of confidence scores for each class independently. This allows for the prediction of several semantically distinct classes within one video input. Our evaluations show that our method not only achieves strong performance on three single-label action classification datasets (UCF-101, HMDB, and RareAct), but also outperforms previous ZSAR approaches on a challenging multi-label dataset (AVA) and a real-world surprise activity detection dataset (MEVA).
The goal of this paper is to characterize Gaussian-Process optimization in the setting where the function domain is large relative to the number of admissible function evaluations, i.e., where it is impossible to find the global optimum. We provide upper bounds on the suboptimality (Bayesian simple regret) of the solution found by optimization strategies that are closely related to the widely used expected improvement (EI) and upper confidence bound (UCB) algorithms. These regret bounds illuminate the relationship between the number of evaluations, the domain size (i.e. cardinality of finite domains / Lipschitz constant of the covariance function in continuous domains), and the optimality of the retrieved function value.In particular, we show that even when the number of evaluations is far too small to find the global optimum, we can find nontrivial function values (e.g. values that achieve a certain ratio with the optimal value).
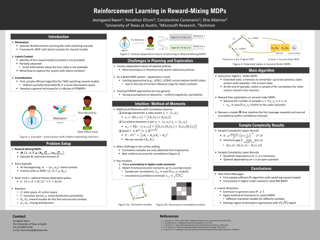
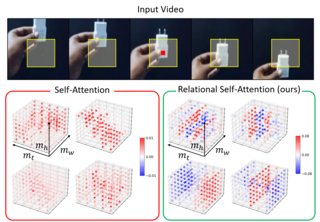
Convolution has been arguably the most important feature transform for modern neural networks, leading to the advance of deep learning. Recent emergence of Transformer networks, which replace convolution layers with self-attention blocks, has revealed the limitation of stationary convolution kernels and opened the door to the era of dynamic feature transforms. The existing dynamic transforms, including self-attention, however, are all limited for video understanding where correspondence relations in space and time, i.e., motion information, are crucial for effective representation. In this work, we introduce a relational feature transform, dubbed the relational self-attention (RSA), that leverages rich structures of spatio-temporal relations in videos by dynamically generating relational kernels and aggregating relational contexts. Our experiments and ablation studies show that the RSA network substantially outperforms convolution and self-attention counterparts, achieving the state of the art on the standard motion-centric benchmarks for video action recognition, such as Something-Something-V1&V2, Diving48, and FineGym.
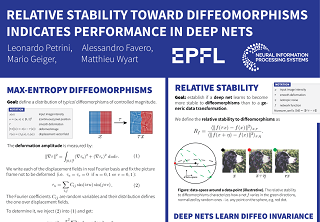
Many of the causal discovery methods rely on the faithfulness assumption to guarantee asymptotic correctness. However, the assumption can be approximately violated in many ways, leading to sub-optimal solutions. Although there is a line of research in Bayesian network structure learning that focuses on weakening the assumption, such as exact search methods with well-defined score functions, they do not scale well to large graphs. In this work, we introduce several strategies to improve the scalability of exact score-based methods in the linear Gaussian setting. In particular, we develop a super-structure estimation method based on the support of inverse covariance matrix which requires assumptions that are strictly weaker than faithfulness, and apply it to restrict the search space of exact search. We also propose a local search strategy that performs exact search on the local clusters formed by each variable and its neighbors within two hops in the super-structure. Numerical experiments validate the efficacy of the proposed procedure, and demonstrate that it scales up to hundreds of nodes with a high accuracy.
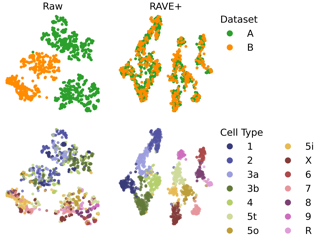
Integrating data from multiple experiments is common practice in systems neuroscience but it requires inter-experimental variability to be negligible compared to the biological signal of interest. This requirement is rarely fulfilled; systematic changes between experiments can drastically affect the outcome of complex analysis pipelines. Modern machine learning approaches designed to adapt models across multiple data domains offer flexible ways of removing inter-experimental variability where classical statistical methods often fail. While applications of these methods have been mostly limited to single-cell genomics, in this work, we develop a theoretical framework for domain adaptation in systems neuroscience. We implement this in an adversarial optimization scheme that removes inter-experimental variability while preserving the biological signal. We compare our method to previous approaches on a large-scale dataset of two-photon imaging recordings of retinal bipolar cell responses to visual stimuli. This dataset provides a unique benchmark as it contains biological signal from well-defined cell types that is obscured by large inter-experimental variability. In a supervised setting, we compare the generalization performance of cell type classifiers across experiments, which we validate with anatomical cell type distributions from electron microscopy data. In an unsupervised setting, we remove inter-experimental variability from the data which can then be fed …

Multi-view methods learn representations by aligning multiple views of the same image and their performance largely depends on the choice of data augmentation. In this paper, we notice that some other useful augmentations, such as image rotation, are harmful for multi-view methods because they cause a semantic shift that is too large to be aligned well. This observation motivates us to relax the exact alignment objective to better cultivate stronger augmentations. Taking image rotation as a case study, we develop a generic approach, Pretext-aware Residual Relaxation (Prelax), that relaxes the exact alignment by allowing an adaptive residual vector between different views and encoding the semantic shift through pretext-aware learning. Extensive experiments on different backbones show that our method can not only improve multi-view methods with existing augmentations, but also benefit from stronger image augmentations like rotation.
Self-supervised Learning (SSL) including the mainstream contrastive learning has achieved great success in learning visual representations without data annotations. However, most of methods mainly focus on the instance level information (\ie, the different augmented images of the same instance should have the same feature or cluster into the same class), but there is a lack of attention on the relationships between different instances. In this paper, we introduced a novel SSL paradigm, which we term as relational self-supervised learning (ReSSL) framework that learns representations by modeling the relationship between different instances. Specifically, our proposed method employs sharpened distribution of pairwise similarities among different instances as \textit{relation} metric, which is thus utilized to match the feature embeddings of different augmentations. Moreover, to boost the performance, we argue that weak augmentations matter to represent a more reliable relation, and leverage momentum strategy for practical efficiency. Experimental results show that our proposed ReSSL significantly outperforms the previous state-of-the-art algorithms in terms of both performance and training efficiency.
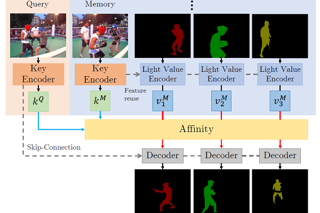
This paper presents a simple yet effective approach to modeling space-time correspondences in the context of video object segmentation. Unlike most existing approaches, we establish correspondences directly between frames without re-encoding the mask features for every object, leading to a highly efficient and robust framework. With the correspondences, every node in the current query frame is inferred by aggregating features from the past in an associative fashion. We cast the aggregation process as a voting problem and find that the existing inner-product affinity leads to poor use of memory with a small (fixed) subset of memory nodes dominating the votes, regardless of the query. In light of this phenomenon, we propose using the negative squared Euclidean distance instead to compute the affinities. We validated that every memory node now has a chance to contribute, and experimentally showed that such diversified voting is beneficial to both memory efficiency and inference accuracy. The synergy of correspondence networks and diversified voting works exceedingly well, achieves new state-of-the-art results on both DAVIS and YouTubeVOS datasets while running significantly faster at 20+ FPS for multiple objects without bells and whistles.
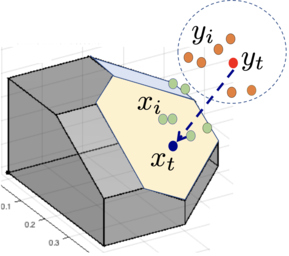

The existing literature on deep learning for tabular data proposes a wide range of novel architectures and reports competitive results on various datasets. However, the proposed models are usually not properly compared to each other and existing works often use different benchmarks and experiment protocols. As a result, it is unclear for both researchers and practitioners what models perform best. Additionally, the field still lacks effective baselines, that is, the easy-to-use models that provide competitive performance across different problems.In this work, we perform an overview of the main families of DL architectures for tabular data and raise the bar of baselines in tabular DL by identifying two simple and powerful deep architectures. The first one is a ResNet-like architecture which turns out to be a strong baseline that is often missing in prior works. The second model is our simple adaptation of the Transformer architecture for tabular data, which outperforms other solutions on most tasks. Both models are compared to many existing architectures on a diverse set of tasks under the same training and tuning protocols. We also compare the best DL models with Gradient Boosted Decision Trees and conclude that there is still no universally superior solution. The source …

We investigate the HSIC (Hilbert-Schmidt independence criterion) bottleneck as a regularizer for learning an adversarially robust deep neural network classifier. In addition to the usual cross-entropy loss, we add regularization terms for every intermediate layer to ensure that the latent representations retain useful information for output prediction while reducing redundant information. We show that the HSIC bottleneck enhances robustness to adversarial attacks both theoretically and experimentally. In particular, we prove that the HSIC bottleneck regularizer reduces the sensitivity of the classifier to adversarial examples. Our experiments on multiple benchmark datasets and architectures demonstrate that incorporating an HSIC bottleneck regularizer attains competitive natural accuracy and improves adversarial robustness, both with and without adversarial examples during training. Our code and adversarially robust models are publicly available.
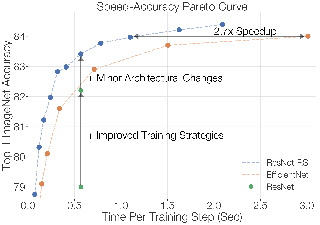
Novel computer vision architectures monopolize the spotlight, but the impact of the model architecture is often conflated with simultaneous changes to training methodology and scaling strategies.Our work revisits the canonical ResNet and studies these three aspects in an effort to disentangle them. Perhaps surprisingly, we find that training and scaling strategies may matter more than architectural changes, and further, that the resulting ResNets match recent state-of-the-art models. We show that the best performing scaling strategy depends on the training regime and offer two new scaling strategies: (1) scale model depth in regimes where overfitting can occur (width scaling is preferable otherwise); (2) increase image resolution more slowly than previously recommended.Using improved training and scaling strategies, we design a family of ResNet architectures, ResNet-RS, which are 1.7x - 2.7x faster than EfficientNets on TPUs, while achieving similar accuracies on ImageNet. In a large-scale semi-supervised learning setup, ResNet-RS achieves 86.2% top-1 ImageNet accuracy, while being 4.7x faster than EfficientNet-NoisyStudent. The training techniques improve transfer performance on a suite of downstream tasks (rivaling state-of-the-art self-supervised algorithms) and extend to video classification on Kinetics-400. We recommend practitioners use these simple revised ResNets as baselines for future research.
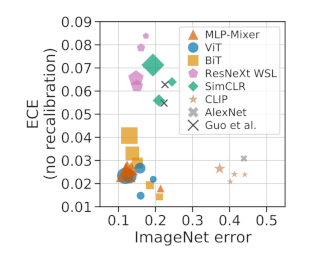
Accurate estimation of predictive uncertainty (model calibration) is essential for the safe application of neural networks. Many instances of miscalibration in modern neural networks have been reported, suggesting a trend that newer, more accurate models produce poorly calibrated predictions. Here, we revisit this question for recent state-of-the-art image classification models. We systematically relate model calibration and accuracy, and find that the most recent models, notably those not using convolutions, are among the best calibrated. Trends observed in prior model generations, such as decay of calibration with distribution shift or model size, are less pronounced in recent architectures. We also show that model size and amount of pretraining do not fully explain these differences, suggesting that architecture is a major determinant of calibration properties.
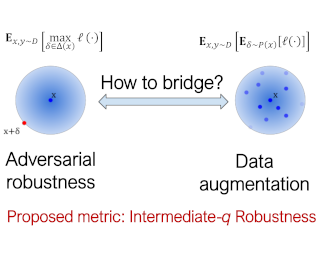
Several recent works in machine learning have focused on evaluating the test-time robustness of a classifier: how well the classifier performs not just on the target domain it was trained upon, but upon perturbed examples. In these settings, the focus has largely been on two extremes of robustness: the robustness to perturbations drawn at random from within some distribution (i.e., robustness to random perturbations), and the robustness to the worst case perturbation in some set (i.e., adversarial robustness). In this paper, we argue that a sliding scale between these two extremes provides a valuable additional metric by which to gauge robustness. Specifically, we illustrate that each of these two extremes is naturally characterized by a (functional) q-norm over perturbation space, with q=1 corresponding to robustness to random perturbations and q=\infty corresponding to adversarial perturbations. We then present the main technical contribution of our paper: a method for efficiently estimating the value of these norms by interpreting them as the partition function of a particular distribution, then using path sampling with MCMC methods to estimate this partition function (either traditional Metropolis-Hastings for non-differentiable perturbations, or Hamiltonian Monte Carlo for differentiable perturbations). We show that our approach provides substantially better estimates than …
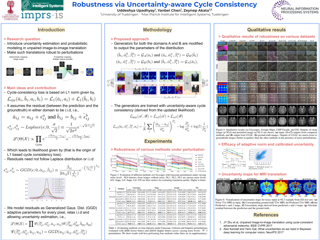
Unpaired image-to-image translation refers to learning inter-image-domain mapping without corresponding image pairs. Existing methods learn deterministic mappings without explicitly modelling the robustness to outliers or predictive uncertainty, leading to performance degradation when encountering unseen perturbations at test time. To address this, we propose a novel probabilistic method based on Uncertainty-aware Generalized Adaptive Cycle Consistency (UGAC), which models the per-pixel residual by generalized Gaussian distribution, capable of modelling heavy-tailed distributions. We compare our model with a wide variety of state-of-the-art methods on various challenging tasks including unpaired image translation of natural images spanning autonomous driving, maps, facades, and also in the medical imaging domain consisting of MRI. Experimental results demonstrate that our method exhibits stronger robustness towards unseen perturbations in test data. Code is released here: https://github.com/ExplainableML/UncertaintyAwareCycleConsistency.
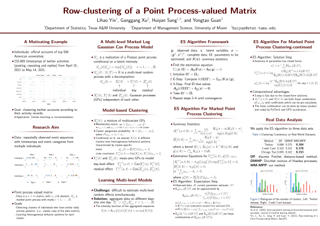
Structured point process data harvested from various platforms poses new challenges to the machine learning community. To cluster repeatedly observed marked point processes, we propose a novel mixture model of multi-level marked point processes for identifying potential heterogeneity in the observed data. Specifically, we study a matrix whose entries are marked log-Gaussian Cox processes and cluster rows of such a matrix. An efficient semi-parametric Expectation-Solution (ES) algorithm combined with functional principal component analysis (FPCA) of point processes is proposed for model estimation. The effectiveness of the proposed framework is demonstrated through simulation studies and real data analyses.
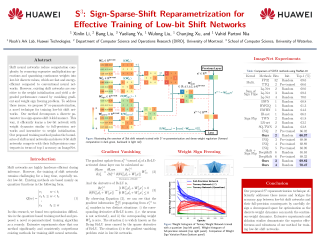
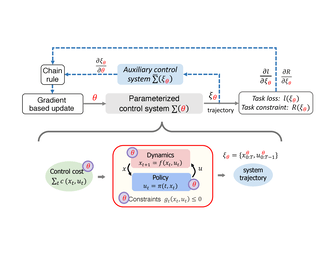
We propose a Safe Pontryagin Differentiable Programming (Safe PDP) methodology, which establishes a theoretical and algorithmic framework to solve a broad class of safety-critical learning and control tasks---problems that require the guarantee of safety constraint satisfaction at any stage of the learning and control progress. In the spirit of interior-point methods, Safe PDP handles different types of system constraints on states and inputs by incorporating them into the cost or loss through barrier functions. We prove three fundamentals of the proposed Safe PDP: first, both the solution and its gradient in the backward pass can be approximated by solving their more efficient unconstrained counterparts; second, the approximation for both the solution and its gradient can be controlled for arbitrary accuracy by a barrier parameter; and third, importantly, all intermediate results throughout the approximation and optimization strictly respect the constraints, thus guaranteeing safety throughout the entire learning and control process. We demonstrate the capabilities of Safe PDP in solving various safety-critical tasks, including safe policy optimization, safe motion planning, and learning MPCs from demonstrations, on different challenging systems such as 6-DoF maneuvering quadrotor and 6-DoF rocket powered landing.
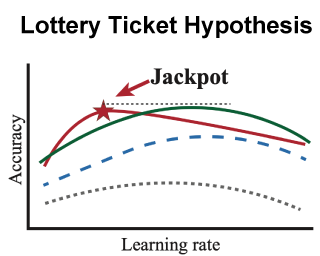
There have been long-standing controversies and inconsistencies over the experiment setup and criteria for identifying the "winning ticket" in literature. To reconcile such, we revisit the definition of lottery ticket hypothesis, with comprehensive and more rigorous conditions. Under our new definition, we show concrete evidence to clarify whether the winning ticket exists across the major DNN architectures and/or applications. Through extensive experiments, we perform quantitative analysis on the correlations between winning tickets and various experimental factors, and empirically study the patterns of our observations. We find that the key training hyperparameters, such as learning rate and training epochs, as well as the architecture characteristics such as capacities and residual connections, are all highly correlated with whether and when the winning tickets can be identified. Based on our analysis, we summarize a guideline for parameter settings in regards of specific architecture characteristics, which we hope to catalyze the research progress on the topic of lottery ticket hypothesis. Our codes are publicly available at: https://github.com/boone891214/sanity-check-LTH.
With the preponderance of pretrained deep learning models available off-the-shelf from model banks today, finding the best weights to fine-tune to your use-case can be a daunting task. Several methods have recently been proposed to find good models for transfer learning, but they either don't scale well to large model banks or don't perform well on the diversity of off-the-shelf models. Ideally the question we want to answer is, "given some data and a source model, can you quickly predict the model's accuracy after fine-tuning?" In this paper, we formalize this setting as "Scalable Diverse Model Selection" and propose several benchmarks for evaluating on this task. We find that existing model selection and transferability estimation methods perform poorly here and analyze why this is the case. We then introduce simple techniques to improve the performance and speed of these algorithms. Finally, we iterate on existing methods to create PARC, which outperforms all other methods on diverse model selection. We have released the benchmarks and method code in hope to inspire future work in model selection for accessible transfer learning.
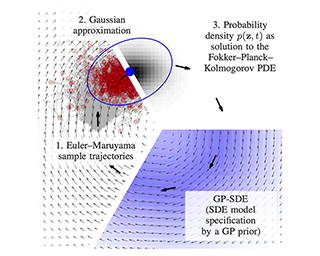
Simulation-based techniques such as variants of stochastic Runge–Kutta are the de facto approach for inference with stochastic differential equations (SDEs) in machine learning. These methods are general-purpose and used with parametric and non-parametric models, and neural SDEs. Stochastic Runge–Kutta relies on the use of sampling schemes that can be inefficient in high dimensions. We address this issue by revisiting the classical SDE literature and derive direct approximations to the (typically intractable) Fokker–Planck–Kolmogorov equation by matching moments. We show how this workflow is fast, scales to high-dimensional latent spaces, and is applicable to scarce-data applications, where a non-parametric SDE with a driving Gaussian process velocity field specifies the model.
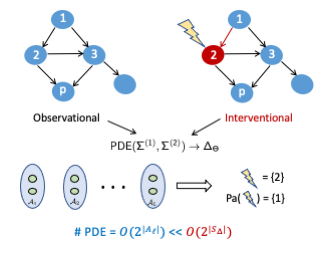
This paper considers the problem of estimating the unknown intervention targets in a causal directed acyclic graph from observational and interventional data. The focus is on soft interventions in linear structural equation models (SEMs). Current approaches to causal structure learning either work with known intervention targets or use hypothesis testing to discover the unknown intervention targets even for linear SEMs. This severely limits their scalability and sample complexity. This paper proposes a scalable and efficient algorithm that consistently identifies all intervention targets. The pivotal idea is to estimate the intervention sites from the difference between the precision matrices associated with the observational and interventional datasets. It involves repeatedly estimating such sites in different subsets of variables. The proposed algorithm can be used to also update a given observational Markov equivalence class into the interventional Markov equivalence class. Consistency, Markov equivalency, and sample complexity are established analytically. Finally, simulation results on both real and synthetic data demonstrate the gains of the proposed approach for scalable causal structure recovery. Implementation of the algorithm and the code to reproduce the simulation results are available at \url{https://github.com/bvarici/intervention-estimation}.
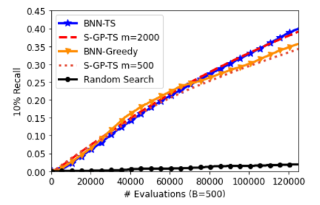
Thompson Sampling (TS) from Gaussian Process (GP) models is a powerful tool for the optimization of black-box functions. Although TS enjoys strong theoretical guarantees and convincing empirical performance, it incurs a large computational overhead that scales polynomially with the optimization budget. Recently, scalable TS methods based on sparse GP models have been proposed to increase the scope of TS, enabling its application to problems that are sufficiently multi-modal, noisy or combinatorial to require more than a few hundred evaluations to be solved. However, the approximation error introduced by sparse GPs invalidates all existing regret bounds. In this work, we perform a theoretical and empirical analysis of scalable TS. We provide theoretical guarantees and show that the drastic reduction in computational complexity of scalable TS can be enjoyed without loss in the regret performance over the standard TS. These conceptual claims are validated for practical implementations of scalable TS on synthetic benchmarks and as part of a real-world high-throughput molecular design task.
Sparsely-gated Mixture of Experts networks (MoEs) have demonstrated excellent scalability in Natural Language Processing. In Computer Vision, however, almost all performant networks are "dense", that is, every input is processed by every parameter. We present a Vision MoE (V-MoE), a sparse version of the Vision Transformer, that is scalable and competitive with the largest dense networks. When applied to image recognition, V-MoE matches the performance of state-of-the-art networks, while requiring as little as half of the compute at inference time. Further, we propose an extension to the routing algorithm that can prioritize subsets of each input across the entire batch, leading to adaptive per-image compute. This allows V-MoE to trade-off performance and compute smoothly at test-time. Finally, we demonstrate the potential of V-MoE to scale vision models, and train a 15B parameter model that attains 90.35% on ImageNet.
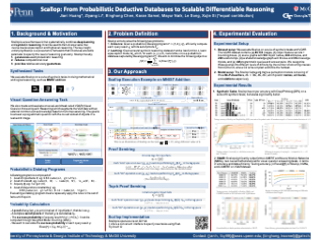
Deep learning and symbolic reasoning are complementary techniques for an intelligent system. However, principled combinations of these techniques have limited scalability, rendering them ill-suited for real-world applications. We propose Scallop, a system that builds upon probabilistic deductive databases, to bridge this gap. The key insight underlying Scallop is a provenance framework that introduces a tunable parameter to specify the level of reasoning granularity. Scallop thereby i) generalizes exact probabilistic reasoning, ii) asymptotically reduces computational cost, and iii) provides relative accuracy guarantees. On a suite of tasks that involve mathematical and logical reasoning, Scallop scales significantly better without sacrificing accuracy compared to DeepProbLog, a principled neural logic programming approach. We also create and evaluate on a real-world Visual Question Answering (VQA) benchmark that requires multi-hop reasoning. Scallop outperforms two VQA-tailored models, a Neural Module Networks based and a transformer based model, by 12.42% and 21.66% respectively.
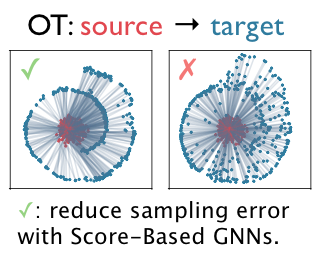
We consider the fundamental problem of sampling the optimal transport coupling between given source and target distributions. In certain cases, the optimal transport plan takes the form of a one-to-one mapping from the source support to the target support, but learning or even approximating such a map is computationally challenging for large and high-dimensional datasets due to the high cost of linear programming routines and an intrinsic curse of dimensionality. We study instead the Sinkhorn problem, a regularized form of optimal transport whose solutions are couplings between the source and the target distribution. We introduce a novel framework for learning the Sinkhorn coupling between two distributions in the form of a score-based generative model. Conditioned on source data, our procedure iterates Langevin Dynamics to sample target data according to the regularized optimal coupling. Key to this approach is a neural network parametrization of the Sinkhorn problem, and we prove convergence of gradient descent with respect to network parameters in this formulation. We demonstrate its empirical success on a variety of large scale optimal transport tasks.
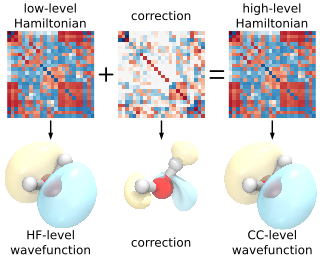
Machine learning has enabled the prediction of quantum chemical properties with high accuracy and efficiency, allowing to bypass computationally costly ab initio calculations. Instead of training on a fixed set of properties, more recent approaches attempt to learn the electronic wavefunction (or density) as a central quantity of atomistic systems, from which all other observables can be derived. This is complicated by the fact that wavefunctions transform non-trivially under molecular rotations, which makes them a challenging prediction target. To solve this issue, we introduce general SE(3)-equivariant operations and building blocks for constructing deep learning architectures for geometric point cloud data and apply them to reconstruct wavefunctions of atomistic systems with unprecedented accuracy. Our model achieves speedups of over three orders of magnitude compared to ab initio methods and reduces prediction errors by up to two orders of magnitude compared to the previous state-of-the-art. This accuracy makes it possible to derive properties such as energies and forces directly from the wavefunction in an end-to-end manner. We demonstrate the potential of our approach in a transfer learning application, where a model trained on low accuracy reference wavefunctions implicitly learns to correct for electronic many-body interactions from observables computed at a higher level …
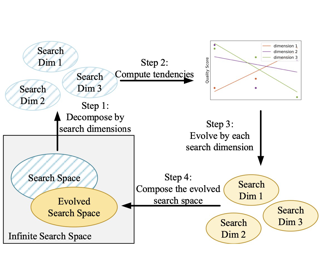
Vision Transformer has shown great visual representation power in substantial vision tasks such as recognition and detection, and thus been attracting fast-growing efforts on manually designing more effective architectures. In this paper, we propose to use neural architecture search to automate this process, by searching not only the architecture but also the search space. The central idea is to gradually evolve different search dimensions guided by their E-T Error computed using a weight-sharing supernet. Moreover, we provide design guidelines of general vision transformers with extensive analysis according to the space searching process, which could promote the understanding of vision transformer. Remarkably, the searched models, named S3 (short for Searching the Search Space), from the searched space achieve superior performance to recently proposed models, such as Swin, DeiT and ViT, when evaluated on ImageNet. The effectiveness of S3 is also illustrated on object detection, semantic segmentation and visual question answering, demonstrating its generality to downstream vision and vision-language tasks. Code and models will be available at https://github.com/microsoft/Cream.
We present SegFormer, a simple, efficient yet powerful semantic segmentation framework which unifies Transformers with lightweight multilayer perceptron (MLP) decoders. SegFormer has two appealing features: 1) SegFormer comprises a novel hierarchically structured Transformer encoder which outputs multiscale features. It does not need positional encoding, thereby avoiding the interpolation of positional codes which leads to decreased performance when the testing resolution differs from training. 2) SegFormer avoids complex decoders. The proposed MLP decoder aggregates information from different layers, and thus combining both local attention and global attention to render powerful representations. We show that this simple and lightweight design is the key to efficient segmentation on Transformers. We scale our approach up to obtain a series of models from SegFormer-B0 to Segformer-B5, which reaches much better performance and efficiency than previous counterparts.For example, SegFormer-B4 achieves 50.3% mIoU on ADE20K with 64M parameters, being 5x smaller and 2.2% better than the previous best method. Our best model, SegFormer-B5, achieves 84.0% mIoU on Cityscapes validation set and shows excellent zero-shot robustness on Cityscapes-C.
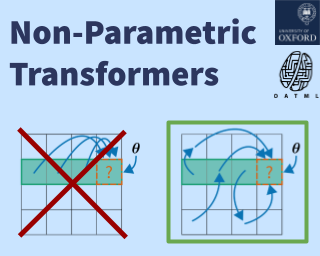
We challenge a common assumption underlying most supervised deep learning: that a model makes a prediction depending only on its parameters and the features of a single input. To this end, we introduce a general-purpose deep learning architecture that takes as input the entire dataset instead of processing one datapoint at a time. Our approach uses self-attention to reason about relationships between datapoints explicitly, which can be seen as realizing non-parametric models using parametric attention mechanisms. However, unlike conventional non-parametric models, we let the model learn end-to-end from the data how to make use of other datapoints for prediction. Empirically, our models solve cross-datapoint lookup and complex reasoning tasks unsolvable by traditional deep learning models. We show highly competitive results on tabular data, early results on CIFAR-10, and give insight into how the model makes use of the interactions between points.
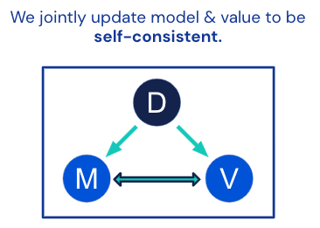
Learned models of the environment provide reinforcement learning (RL) agents with flexible ways of making predictions about the environment.Models enable planning, i.e. using more computation to improve value functions or policies, without requiring additional environment interactions.In this work, we investigate a way of augmenting model-based RL, by additionally encouraging a learned model and value function to be jointly \emph{self-consistent}.This lies in contrast to classic planning methods like Dyna, which only update the value function to be consistent with the model.We propose a number of possible self-consistency updates, study them empirically in both the tabular and function approximation settings, and find that with appropriate choices self-consistency can be useful both for policy evaluation and control.
With the proliferation of machine learning applications in the real world, the demand for explaining machine learning predictions continues to grow especially in high-stakes fields. Recent studies have found that interpretation methods can be sensitive and unreliable, where the interpretations can be disturbed by perturbations or transformations of input data. To address this issue, we propose to learn robust interpretation through transformation equivariant regularization in a self-interpretable model. The resulting model is capable of capturing valid interpretation that is equivariant to geometric transformations. Moreover, since our model is self-interpretable, it enables faithful interpretations that reflect the true predictive mechanism. Unlike existing self-interpretable models, which usually sacrifice expressive power for the sake of interpretation quality, our model preserves the high expressive capability comparable to the state-of-the-art deep learning models in complex tasks, while providing visualizable and faithful high-quality interpretation. We compare with various related methods and validate the interpretation quality and consistency of our model.
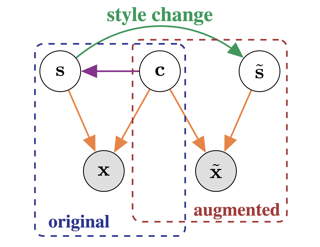
Self-supervised representation learning has shown remarkable success in a number of domains. A common practice is to perform data augmentation via hand-crafted transformations intended to leave the semantics of the data invariant. We seek to understand the empirical success of this approach from a theoretical perspective. We formulate the augmentation process as a latent variable model by postulating a partition of the latent representation into a content component, which is assumed invariant to augmentation, and a style component, which is allowed to change. Unlike prior work on disentanglement and independent component analysis, we allow for both nontrivial statistical and causal dependencies in the latent space. We study the identifiability of the latent representation based on pairs of views of the observations and prove sufficient conditions that allow us to identify the invariant content partition up to an invertible mapping in both generative and discriminative settings. We find numerical simulations with dependent latent variables are consistent with our theory. Lastly, we introduce Causal3DIdent, a dataset of high-dimensional, visually complex images with rich causal dependencies, which we use to study the effect of data augmentations performed in practice.
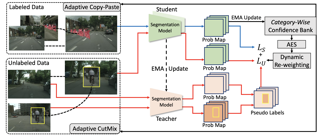
Due to the limited and even imbalanced data, semi-supervised semantic segmentation tends to have poor performance on some certain categories, e.g., tailed categories in Cityscapes dataset which exhibits a long-tailed label distribution. Existing approaches almost all neglect this problem, and treat categories equally. Some popular approaches such as consistency regularization or pseudo-labeling may even harm the learning of under-performing categories, that the predictions or pseudo labels of these categories could be too inaccurate to guide the learning on the unlabeled data. In this paper, we look into this problem, and propose a novel framework for semi-supervised semantic segmentation, named adaptive equalization learning (AEL). AEL adaptively balances the training of well and badly performed categories, with a confidence bank to dynamically track category-wise performance during training. The confidence bank is leveraged as an indicator to tilt training towards under-performing categories, instantiated in three strategies: 1) adaptive Copy-Paste and CutMix data augmentation approaches which give more chance for under-performing categories to be copied or cut; 2) an adaptive data sampling approach to encourage pixels from under-performing category to be sampled; 3) a simple yet effective re-weighting method to alleviate the training noise raised by pseudo-labeling. Experimentally, AEL outperforms the state-of-the-art methods by …
"Monkey see monkey do" is an age-old adage, referring to naive imitation without a deep understanding of a system's underlying mechanics. Indeed, if a demonstrator has access to information unavailable to the imitator (monkey), such as a different set of sensors, then no matter how perfectly the imitator models its perceived environment (See), attempting to directly reproduce the demonstrator's behavior (Do) can lead to poor outcomes. Imitation learning in the presence of a mismatch between demonstrator and imitator has been studied in the literature under the rubric of causal imitation learning (Zhang et. al. 2020), but existing solutions are limited to single-stage decision-making. This paper investigates the problem of causal imitation learning in sequential settings, where the imitator must make multiple decisions per episode. We develop a graphical criterion that is both necessary and sufficient for determining the feasibility of causal imitation, providing conditions when an imitator can match a demonstrator's performance despite differing capabilities. Finally, we provide an efficient algorithm for determining imitability, and corroborate our theory with simulations.
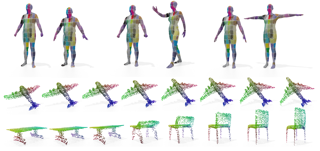
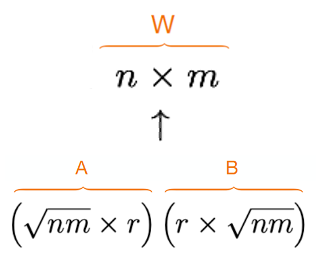
Language models employ a very large number of trainable parameters. Despite being highly overparameterized, these networks often achieve good out-of-sample test performance on the original task and easily fine-tune to related tasks. Recent observations involving, for example, intrinsic dimension of the objective landscape and the lottery ticket hypothesis, indicate that often training actively involves only a small fraction of the parameter space. Thus, a question remains how large a parameter space needs to be in the first place –- the evidence from recent work on model compression, parameter sharing, factorized representations, and knowledge distillation increasingly shows that models can be made much smaller and still perform well. Here, we focus on factorized representations of matrices that underpin dense, embedding, and self-attention layers. We use low-rank factorized representation of a reshaped and rearranged original matrix to achieve space efficient and expressive linear layers. We prove that stacking such low-rank layers increases their expressiveness, providing theoretical understanding for their effectiveness in deep networks. In Transformer models, our approach leads to more than ten-fold reduction in the number of total trainable parameters, including embedding, attention, and feed-forward layers, with little degradation in on-task performance. The approach operates out-of-the-box, replacing each parameter matrix with …
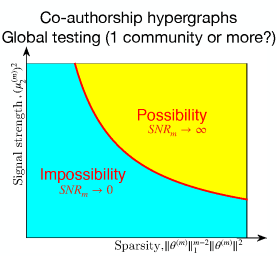
In a broad Degree-Corrected Mixed-Membership (DCMM) setting, we test whether a non-uniform hypergraph has only one community or has multiple communities. Since both the null and alternative hypotheses have many unknown parameters, the challenge is, given an alternative, how to identify the null that is hardest to separate from the alternative. We approach this by proposing a degree matching strategy where the main idea is leveraging the theory for tensor scaling to create a least favorable pair of hypotheses. We present a result on standard minimax lower bound theory and a result on Region of Impossibility (which is more informative than the minimax lower bound). We show that our lower bounds are tight by introducing a new test that attains the lower bound up to a logarithmic factor. We also discuss the case where the hypergraphs may have mixed-memberships.
To help agents reason about scenes in terms of their building blocks, we wish to extract the compositional structure of any given scene (in particular, the configuration and characteristics of objects comprising the scene). This problem is especially difficult when scene structure needs to be inferred while also estimating the agent’s location/viewpoint, as the two variables jointly give rise to the agent’s observations. We present an unsupervised variational approach to this problem. Leveraging the shared structure that exists across different scenes, our model learns to infer two sets of latent representations from RGB video input alone: a set of "object" latents, corresponding to the time-invariant, object-level contents of the scene, as well as a set of "frame" latents, corresponding to global time-varying elements such as viewpoint. This factorization of latents allows our model, SIMONe, to represent object attributes in an allocentric manner which does not depend on viewpoint. Moreover, it allows us to disentangle object dynamics and summarize their trajectories as time-abstracted, view-invariant, per-object properties. We demonstrate these capabilities, as well as the model's performance in terms of view synthesis and instance segmentation, across three procedurally generated video datasets.
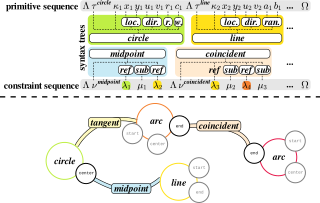
Computer-aided design (CAD) is the most widely used modeling approach for technical design. The typical starting point in these designs is 2D sketches which can later be extruded and combined to obtain complex three-dimensional assemblies. Such sketches are typically composed of parametric primitives, such as points, lines, and circular arcs, augmented with geometric constraints linking the primitives, such as coincidence, parallelism, or orthogonality. Sketches can be represented as graphs, with the primitives as nodes and the constraints as edges. Training a model to automatically generate CAD sketches can enable several novel workflows, but is challenging due to the complexity of the graphs and the heterogeneity of the primitives and constraints. In particular, each type of primitive and constraint may require a record of different size and parameter types.We propose SketchGen as a generative model based on a transformer architecture to address the heterogeneity problem by carefully designing a sequential language for the primitives and constraints that allows distinguishing between different primitive or constraint types and their parameters, while encouraging our model to re-use information across related parameters, encoding shared structure. A particular highlight of our work is the ability to produce primitives linked via constraints that enables the final output …
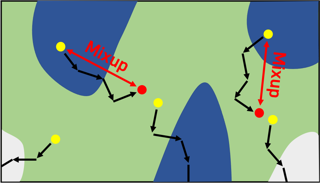

Recent research has shown that graph neural networks (GNNs) can learn policies for locomotion control that are as effective as a typical multi-layer perceptron (MLP), with superior transfer and multi-task performance. However, results have so far been limited to training on small agents, with the performance of GNNs deteriorating rapidly as the number of sensors and actuators grows. A key motivation for the use of GNNs in the supervised learning setting is their applicability to large graphs, but this benefit has not yet been realised for locomotion control. We show that poor scaling in GNNs is a result of increasingly unstable policy updates, caused by overfitting in parts of the network during training. To combat this, we introduce Snowflake, a GNN training method for high-dimensional continuous control that freezes parameters in selected parts of the network. Snowflake significantly boosts the performance of GNNs for locomotion control on large agents, now matching the performance of MLPs while offering superior transfer properties.
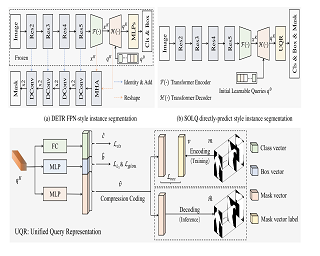
In this paper, we propose an end-to-end framework for instance segmentation. Based on the recently introduced DETR, our method, termed SOLQ, segments objects by learning unified queries. In SOLQ, each query represents one object and has multiple representations: class, location and mask. The object queries learned perform classification, box regression and mask encoding simultaneously in an unified vector form. During training phase, the mask vectors encoded are supervised by the compression coding of raw spatial masks. In inference time,mask vectors produced can be directly transformed to spatial masks by the inverse process of compression coding. Experimental results show that SOLQ can achieve state-of-the-art performance, surpassing most of existing approaches. Moreover, the joint learning of unified query representation can greatly improve the detection performance of DETR. We hope our SOLQ can serve as a strong baseline for the Transformer-based instance segmentation.
Deep learning has powered recent successes of artificial intelligence (AI). However, the deep neural network, as the basic model of deep learning, has suffered from issues such as local traps and miscalibration. In this paper, we provide a new framework for sparse deep learning, which has the above issues addressed in a coherent way. In particular, we lay down a theoretical foundation for sparse deep learning and propose prior annealing algorithms for learning sparse neural networks. The former has successfully tamed the sparse deep neural network into the framework of statistical modeling, enabling prediction uncertainty correctly quantified. The latter can be asymptotically guaranteed to converge to the global optimum, enabling the validity of the down-stream statistical inference. Numerical result indicates the superiority of the proposed method compared to the existing ones.

We introduce a scalable approach to Gaussian process inference that combines spatio-temporal filtering with natural gradient variational inference, resulting in a non-conjugate GP method for multivariate data that scales linearly with respect to time. Our natural gradient approach enables application of parallel filtering and smoothing, further reducing the temporal span complexity to be logarithmic in the number of time steps. We derive a sparse approximation that constructs a state-space model over a reduced set of spatial inducing points, and show that for separable Markov kernels the full and sparse cases exactly recover the standard variational GP, whilst exhibiting favourable computational properties. To further improve the spatial scaling we propose a mean-field assumption of independence between spatial locations which, when coupled with sparsity and parallelisation, leads to an efficient and accurate method for large spatio-temporal problems.
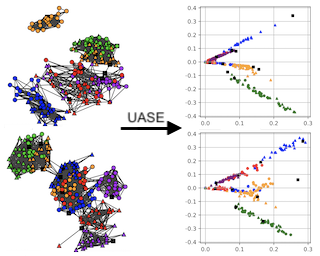
We consider the problem of embedding a dynamic network, to obtain time-evolving vector representations of each node, which can then be used to describe changes in behaviour of individual nodes, communities, or the entire graph. Given this open-ended remit, we argue that two types of stability in the spatio-temporal positioning of nodes are desirable: to assign the same position, up to noise, to nodes behaving similarly at a given time (cross-sectional stability) and a constant position, up to noise, to a single node behaving similarly across different times (longitudinal stability). Similarity in behaviour is defined formally using notions of exchangeability under a dynamic latent position network model. By showing how this model can be recast as a multilayer random dot product graph, we demonstrate that unfolded adjacency spectral embedding satisfies both stability conditions. We also show how two alternative methods, omnibus and independent spectral embedding, alternately lack one or the other form of stability.
Geometric alignment appears in a variety of applications, ranging from domain adaptation, optimal transport, and normalizing flows in machine learning; optical flow and learned augmentation in computer vision and deformable registration within biomedical imaging. A recurring challenge is the alignment of domains whose topology is not the same; a problem that is routinely ignored, potentially introducing bias in downstream analysis. As a first step towards solving such alignment problems, we propose an unsupervised algorithm for the detection of changes in image topology. The model is based on a conditional variational auto-encoder and detects topological changes between two images during the registration step. We account for both topological changes in the image under spatial variation and unexpected transformations. Our approach is validated on two tasks and datasets: detection of topological changes in microscopy images of cells, and unsupervised anomaly detection brain imaging.

Stabilizing an unknown control system is one of the most fundamental problems in control systems engineering. In this paper, we provide a simple, model-free algorithm for stabilizing fully observed dynamical systems. While model-free methods have become increasingly popular in practice due to their simplicity and flexibility, stabilization via direct policy search has received surprisingly little attention. Our algorithm proceeds by solving a series of discounted LQR problems, where the discount factor is gradually increased. We prove that this method efficiently recovers a stabilizing controller for linear systems, and for smooth, nonlinear systems within a neighborhood of their equilibria. Our approach overcomes a significant limitation of prior work, namely the need for a pre-given stabilizing control policy. We empirically evaluate the effectiveness of our approach on common control benchmarks.
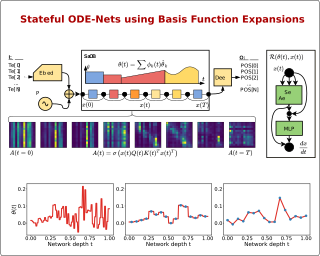
The recently-introduced class of ordinary differential equation networks (ODE-Nets) establishes a fruitful connection between deep learning and dynamical systems. In this work, we reconsider formulations of the weights as continuous-in-depth functions using linear combinations of basis functions which enables us to leverage parameter transformations such as function projections. In turn, this view allows us to formulate a novel stateful ODE-Block that handles stateful layers. The benefits of this new ODE-Block are twofold: first, it enables incorporating meaningful continuous-in-depth batch normalization layers to achieve state-of-the-art performance; second, it enables compressing the weights through a change of basis, without retraining, while maintaining near state-of-the-art performance and reducing both inference time and memory footprint. Performance is demonstrated by applying our stateful ODE-Block to (a) image classification tasks using convolutional units and (b) sentence-tagging tasks using transformer encoder units.
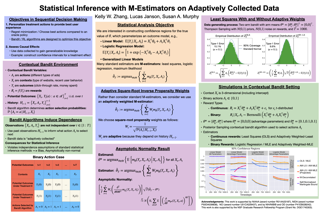
Bandit algorithms are increasingly used in real-world sequential decision-making problems. Associated with this is an increased desire to be able to use the resulting datasets to answer scientific questions like: Did one type of ad lead to more purchases? In which contexts is a mobile health intervention effective? However, classical statistical approaches fail to provide valid confidence intervals when used with data collected with bandit algorithms. Alternative methods have recently been developed for simple models (e.g., comparison of means). Yet there is a lack of general methods for conducting statistical inference using more complex models on data collected with (contextual) bandit algorithms; for example, current methods cannot be used for valid inference on parameters in a logistic regression model for a binary reward. In this work, we develop theory justifying the use of M-estimators---which includes estimators based on empirical risk minimization as well as maximum likelihood---on data collected with adaptive algorithms, including (contextual) bandit algorithms. Specifically, we show that M-estimators, modified with particular adaptive weights, can be used to construct asymptotically valid confidence regions for a variety of inferential targets.
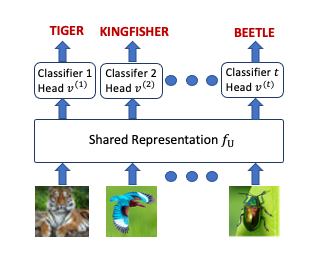
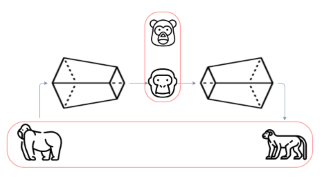
The introduction of Variational Autoencoders (VAE) has been marked as a breakthrough in the history of representation learning models. Besides having several accolades of its own, VAE has successfully flagged off a series of inventions in the form of its immediate successors. Wasserstein Autoencoder (WAE), being an heir to that realm carries with it all of the goodness and heightened generative promises, matching even the generative adversarial networks (GANs). Needless to say, recent years have witnessed a remarkable resurgence in statistical analyses of the GANs. Similar examinations for Autoencoders however, despite their diverse applicability and notable empirical performance, remain largely absent. To close this gap, in this paper, we investigate the statistical properties of WAE. Firstly, we provide statistical guarantees that WAE achieves the target distribution in the latent space, utilizing the Vapnik–Chervonenkis (VC) theory. The main result, consequently ensures the regeneration of the input distribution, harnessing the potential offered by Optimal Transport of measures under the Wasserstein metric. This study, in turn, hints at the class of distributions WAE can reconstruct after suffering a compression in the form of a latent law.
Areas under ROC (AUROC) and precision-recall curves (AUPRC) are common metrics for evaluating classification performance for imbalanced problems. Compared with AUROC, AUPRC is a more appropriate metric for highly imbalanced datasets. While stochastic optimization of AUROC has been studied extensively, principled stochastic optimization of AUPRC has been rarely explored. In this work, we propose a principled technical method to optimize AUPRC for deep learning. Our approach is based on maximizing the averaged precision (AP), which is an unbiased point estimator of AUPRC. We cast the objective into a sum of dependent compositional functions with inner functions dependent on random variables of the outer level. We propose efficient adaptive and non-adaptive stochastic algorithms named SOAP with provable convergence guarantee under mild conditions by leveraging recent advances in stochastic compositional optimization. Extensive experimental results on image and graph datasets demonstrate that our proposed method outperforms prior methods on imbalanced problems in terms of AUPRC. To the best of our knowledge, our work represents the first attempt to optimize AUPRC with provable convergence. The SOAP has been implemented in the libAUC library at https://libauc.org/.
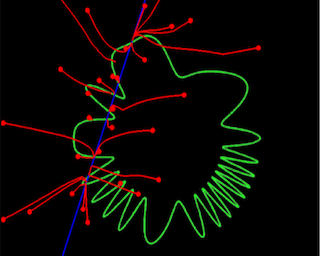
Deep neural networks have provided state-of-the-art solutions for problems such as image denoising, which implicitly rely on a prior probability model of natural images. Two recent lines of work – Denoising Score Matching and Plug-and-Play – propose methodologies for drawing samples from this implicit prior and using it to solve inverse problems, respectively. Here, we develop a parsimonious and robust generalization of these ideas. We rely on a classic statistical result that shows the least-squares solution for removing additive Gaussian noise can be written directly in terms of the gradient of the log of the noisy signal density. We use this to derive a stochastic coarse-to-fine gradient ascent procedure for drawing high-probability samples from the implicit prior embedded within a CNN trained to perform blind denoising. A generalization of this algorithm to constrained sampling provides a method for using the implicit prior to solve any deterministic linear inverse problem, with no additional training, thus extending the power of supervised learning for denoising to a much broader set of problems. The algorithm relies on minimal assumptions and exhibits robust convergence over a wide range of parameter choices. To demonstrate the generality of our method, we use it to obtain state-of-the-art levels …

The community detection problem requires to cluster the nodes of a network into a small number of well-connected ‘communities’. There has been substantial recent progress in characterizing the fundamental statistical limits of community detection under simple stochastic block models. However, in real-world applications, the network structure is typically dynamic, with nodes that join over time. In this setting, we would like a detection algorithm to perform only a limited number of updates at each node arrival. While standard voting approaches satisfy this constraint, it is unclear whether they exploit the network information optimally. We introduce a simple model for networks growing over time which we refer to as streaming stochastic block model (StSBM). Within this model, we prove that voting algorithms have fundamental limitations. We also develop a streaming belief-propagation (STREAMBP) approach, for which we prove optimality in certain regimes. We validate our theoretical findings on synthetic and real data
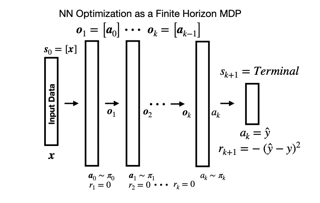
Structural credit assignment in neural networks is a long-standing problem, with a variety of alternatives to backpropagation proposed to allow for local training of nodes. One of the early strategies was to treat each node as an agent and use a reinforcement learning method called REINFORCE to update each node locally with only a global reward signal. In this work, we revisit this approach and investigate if we can leverage other reinforcement learning approaches to improve learning. We first formalize training a neural network as a finite-horizon reinforcement learning problem and discuss how this facilitates using ideas from reinforcement learning like off-policy learning. We show that the standard on-policy REINFORCE approach, even with a variety of variance reduction approaches, learns suboptimal solutions. We introduce an off-policy approach, to facilitate reasoning about the greedy action for other agents and help overcome stochasticity in other agents. We conclude by showing that these networks of agents can be more robust to correlated samples when learning online.
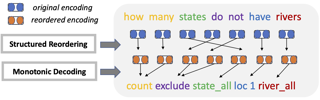
Despite success in many domains, neural models struggle in settings where train and test examples are drawn from different distributions. In particular, in contrast to humans, conventional sequence-to-sequence (seq2seq) models fail to generalize systematically, i.e., interpret sentences representing novel combinations of concepts (e.g., text segments) seen in training. Traditional grammar formalisms excel in such settings by implicitly encoding alignments between input and output segments, but are hard to scale and maintain. Instead of engineering a grammar, we directly model segment-to-segment alignments as discrete structured latent variables within a neural seq2seq model. To efficiently explore the large space of alignments, we introduce a reorder-first align-later framework whose central component is a neural reordering module producing separable permutations. We present an efficient dynamic programming algorithm performing exact marginal inference of separable permutations, and, thus, enabling end-to-end differentiable training of our model. The resulting seq2seq model exhibits better systematic generalization than standard models on synthetic problems and NLP tasks (i.e., semantic parsing and machine translation).
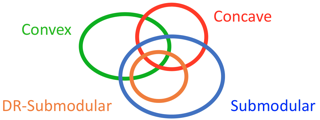
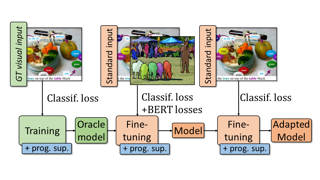
Methods for Visual Question Anwering (VQA) are notorious for leveraging dataset biases rather than performing reasoning, hindering generalization. It has been recently shown that better reasoning patterns emerge in attention layers of a state-of-the-art VQA model when they are trained on perfect (oracle) visual inputs. This provides evidence that deep neural networks can learn to reason when training conditions are favorable enough. However, transferring this learned knowledge to deployable models is a challenge, as much of it is lost during the transfer.We propose a method for knowledge transfer based on a regularization term in our loss function, supervising the sequence of required reasoning operations.We provide a theoretical analysis based on PAC-learning, showing that such program prediction can lead to decreased sample complexity under mild hypotheses. We also demonstrate the effectiveness of this approach experimentally on the GQA dataset and show its complementarity to BERT-like self-supervised pre-training.
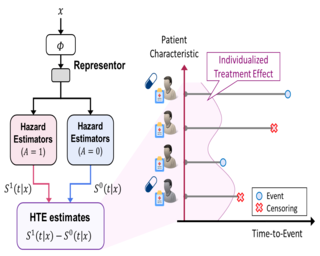
We study the problem of inferring heterogeneous treatment effects from time-to-event data. While both the related problems of (i) estimating treatment effects for binary or continuous outcomes and (ii) predicting survival outcomes have been well studied in the recent machine learning literature, their combination -- albeit of high practical relevance -- has received considerably less attention. With the ultimate goal of reliably estimating the effects of treatments on instantaneous risk and survival probabilities, we focus on the problem of learning (discrete-time) treatment-specific conditional hazard functions. We find that unique challenges arise in this context due to a variety of covariate shift issues that go beyond a mere combination of well-studied confounding and censoring biases. We theoretically analyse their effects by adapting recent generalization bounds from domain adaptation and treatment effect estimation to our setting and discuss implications for model design. We use the resulting insights to propose a novel deep learning method for treatment-specific hazard estimation based on balancing representations. We investigate performance across a range of experimental settings and empirically confirm that our method outperforms baselines by addressing covariate shifts from various sources.
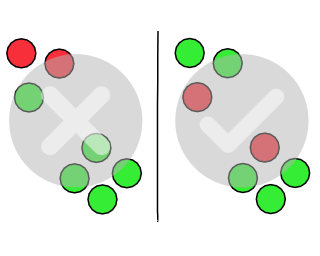
We investigate the optimal design of experimental studies that have pre-treatment outcome data available. The average treatment effect is estimated as the difference between the weighted average outcomes of the treated and control units. A number of commonly used approaches fit this formulation, including the difference-in-means estimator and a variety of synthetic-control techniques. We propose several methods for choosing the set of treated units in conjunction with the weights. Observing the NP-hardness of the problem, we introduce a mixed-integer programming formulation which selects both the treatment and control sets and unit weightings. We prove that these proposed approaches lead to qualitatively different experimental units being selected for treatment. We use simulations based on publicly available data from the US Bureau of Labor Statistics that show improvements in terms of mean squared error and statistical power when compared to simple and commonly used alternatives such as randomized trials.
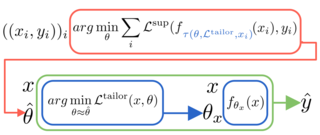
From CNNs to attention mechanisms, encoding inductive biases into neural networks has been a fruitful source of improvement in machine learning. Adding auxiliary losses to the main objective function is a general way of encoding biases that can help networks learn better representations. However, since auxiliary losses are minimized only on training data, they suffer from the same generalization gap as regular task losses. Moreover, by adding a term to the loss function, the model optimizes a different objective than the one we care about. In this work we address both problems: first, we take inspiration from transductive learning and note that after receiving an input but before making a prediction, we can fine-tune our networks on any unsupervised loss. We call this process tailoring, because we customize the model to each input to ensure our prediction satisfies the inductive bias. Second, we formulate meta-tailoring, a nested optimization similar to that in meta-learning, and train our models to perform well on the task objective after adapting them using an unsupervised loss. The advantages of tailoring and meta-tailoring are discussed theoretically and demonstrated empirically on a diverse set of examples.
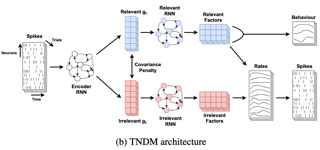
Latent dynamics models have emerged as powerful tools for modeling and interpreting neural population activity. Recently, there has been a focus on incorporating simultaneously measured behaviour into these models to further disentangle sources of neural variability in their latent space. These approaches, however, are limited in their ability to capture the underlying neural dynamics (e.g. linear) and in their ability to relate the learned dynamics back to the observed behaviour (e.g. no time lag). To this end, we introduce Targeted Neural Dynamical Modeling (TNDM), a nonlinear state-space model that jointly models the neural activity and external behavioural variables. TNDM decomposes neural dynamics into behaviourally relevant and behaviourally irrelevant dynamics; the relevant dynamics are used to reconstruct the behaviour through a flexible linear decoder and both sets of dynamics are used to reconstruct the neural activity through a linear decoder with no time lag. We implement TNDM as a sequential variational autoencoder and validate it on simulated recordings and recordings taken from the premotor and motor cortex of a monkey performing a center-out reaching task. We show that TNDM is able to learn low-dimensional latent dynamics that are highly predictive of behaviour without sacrificing its fit to the neural data.
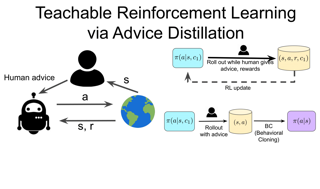
Training automated agents to complete complex tasks in interactive environments is challenging: reinforcement learning requires careful hand-engineering of reward functions, imitation learning requires specialized infrastructure and access to a human expert, and learning from intermediate forms of supervision (like binary preferences) is time-consuming and extracts little information from each human intervention. Can we overcome these challenges by building agents that learn from rich, interactive feedback instead? We propose a new supervision paradigm for interactive learning based on "teachable" decision-making systems that learn from structured advice provided by an external teacher. We begin by formalizing a class of human-in-the-loop decision making problems in which multiple forms of teacher-provided advice are available to a learner. We then describe a simple learning algorithm for these problems that first learns to interpret advice, then learns from advice to complete tasks even in the absence of human supervision. In puzzle-solving, navigation, and locomotion domains, we show that agents that learn from advice can acquire new skills with significantly less human supervision than standard reinforcement learning algorithms and often less than imitation learning.
Despite the predominant use of first-order methods for training deep learning models, second-order methods, and in particular, natural gradient methods, remain of interest because of their potential for accelerating training through the use of curvature information. Several methods with non-diagonal preconditioning matrices, including KFAC, Shampoo, and K-BFGS, have been proposed and shown to be effective. Based on the so-called tensor normal (TN) distribution, we propose and analyze a brand new approximate natural gradient method, Tensor Normal Training (TNT), which like Shampoo, only requires knowledge of the shape of the training parameters. By approximating the probabilistically based Fisher matrix, as opposed to the empirical Fisher matrix, our method uses the block-wise covariance of the sampling based gradient as the pre-conditioning matrix. Moreover, the assumption that the sampling-based (tensor) gradient follows a TN distribution, ensures that its covariance has a Kronecker separable structure, which leads to a tractable approximation to the Fisher matrix. Consequently, TNT's memory requirements and per-iteration computational costs are only slightly higher than those for first-order methods. In our experiments, TNT exhibited superior optimization performance to state-of-the-art first-order methods, and comparable optimization performance to the state-of-the-art second-order methods KFAC and Shampoo. Moreover, TNT demonstrated its ability to generalize as …

We propose to personalize a 2D human pose estimator given a set of test images of a person without using any manual annotations. While there is a significant advancement in human pose estimation, it is still very challenging for a model to generalize to different unknown environments and unseen persons. Instead of using a fixed model for every test case, we adapt our pose estimator during test time to exploit person-specific information. We first train our model on diverse data with both a supervised and a self-supervised pose estimation objectives jointly. We use a Transformer model to build a transformation between the self-supervised keypoints and the supervised keypoints. During test time, we personalize and adapt our model by fine-tuning with the self-supervised objective. The pose is then improved by transforming the updated self-supervised keypoints. We experiment with multiple datasets and show significant improvements on pose estimations with our self-supervised personalization. Project page with code is available at https://liyz15.github.io/TTP/.
We address the unsolved algorithm design problem of choosing a justified regularization parameter in unsupervised domain adaptation. This problem is intriguing as no labels are available in the target domain. Our approach starts with the observation that the widely-used method of minimizing the source error, penalized by a distance measure between source and target feature representations, shares characteristics with regularized ill-posed inverse problems. Regularization parameters in inverse problems are optimally chosen by the fundamental principle of balancing approximation and sampling errors. We use this principle to balance learning errors and domain distance in a target error bound. As a result, we obtain a theoretically justified rule for the choice of the regularization parameter. In contrast to the state of the art, our approach allows source and target distributions with disjoint supports. An empirical comparative study on benchmark datasets underpins the performance of our approach.
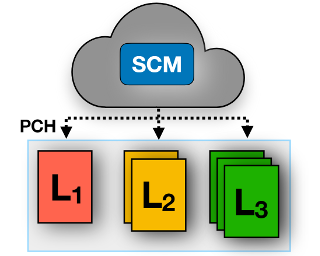
One of the central elements of any causal inference is an object called structural causal model (SCM), which represents a collection of mechanisms and exogenous sources of random variation of the system under investigation (Pearl, 2000). An important property of many kinds of neural networks is universal approximability: the ability to approximate any function to arbitrary precision. Given this property, one may be tempted to surmise that a collection of neural nets is capable of learning any SCM by training on data generated by that SCM. In this paper, we show this is not the case by disentangling the notions of expressivity and learnability. Specifically, we show that the causal hierarchy theorem (Thm. 1, Bareinboim et al., 2020), which describes the limits of what can be learned from data, still holds for neural models. For instance, an arbitrarily complex and expressive neural net is unable to predict the effects of interventions given observational data alone. Given this result, we introduce a special type of SCM called a neural causal model (NCM), and formalize a new type of inductive bias to encode structural constraints necessary for performing causal inferences. Building on this new class of models, we focus on solving two …
Learning to act from observational data without active environmental interaction is a well-known challenge in Reinforcement Learning (RL). Recent approaches involve constraints on the learned policy or conservative updates, preventing strong deviations from the state-action distribution of the dataset. Although these methods are evaluated using non-linear function approximation, theoretical justifications are mostly limited to the tabular or linear cases. Given the impressive results of deep reinforcement learning, we argue for a need to more clearly understand the challenges in this setting.In the vein of Held & Hein's classic 1963 experiment, we propose the "tandem learning" experimental paradigm which facilitates our empirical analysis of the difficulties in offline reinforcement learning. We identify function approximation in conjunction with fixed data distributions as the strongest factors, thereby extending but also challenging hypotheses stated in past work. Our results provide relevant insights for offline deep reinforcement learning, while also shedding new light on phenomena observed in the online case of learning control.

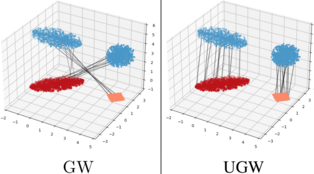
Comparing metric measure spaces (i.e. a metric space endowed with a probability distribution) is at the heart of many machine learning problems. The most popular distance between such metric measure spaces is the Gromov-Wasserstein (GW) distance, which is the solution of a quadratic assignment problem. The GW distance is however limited to the comparison of metric measure spaces endowed with a \emph{probability} distribution. To alleviate this issue, we introduce two Unbalanced Gromov-Wasserstein formulations: a distance and a more tractable upper-bounding relaxation. They both allow the comparison of metric spaces equipped with arbitrary positive measures up to isometries. The first formulation is a positive and definite divergence based on a relaxation of the mass conservation constraint using a novel type of quadratically-homogeneous divergence. This divergence works hand in hand with the entropic regularization approach which is popular to solve large scale optimal transport problems. We show that the underlying non-convex optimization problem can be efficiently tackled using a highly parallelizable and GPU-friendly iterative scheme. The second formulation is a distance between mm-spaces up to isometries based on a conic lifting. Lastly, we provide numerical experiments on synthetic and domain adaptation data with a Positive-Unlabeled learning task to highlight the salient features …
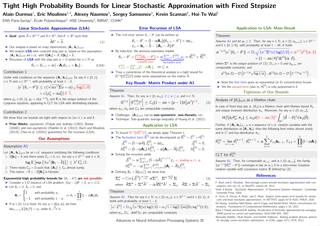
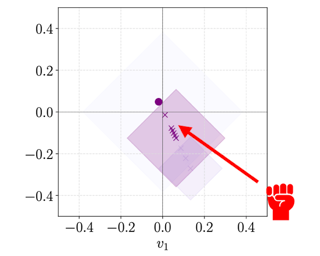

In few-shot domain adaptation (FDA), classifiers for the target domain are trained with \emph{accessible} labeled data in the source domain (SD) and few labeled data in the target domain (TD). However, data usually contain private information in the current era, e.g., data distributed on personal phones. Thus, the private data will be leaked if we directly access data in SD to train a target-domain classifier (required by FDA methods). In this paper, to prevent privacy leakage in SD, we consider a very challenging problem setting, where the classifier for the TD has to be trained using few labeled target data and a well-trained SD classifier, named few-shot hypothesis adaptation (FHA). In FHA, we cannot access data in SD, as a result, the private information in SD will be protected well. To this end, we propose a target-oriented hypothesis adaptation network (TOHAN) to solve the FHA problem, where we generate highly-compatible unlabeled data (i.e., an intermediate domain) to help train a target-domain classifier. TOHAN maintains two deep networks simultaneously, in which one focuses on learning an intermediate domain and the other takes care of the intermediate-to-target distributional adaptation and the target-risk minimization. Experimental results show that TOHAN outperforms competitive baselines significantly.
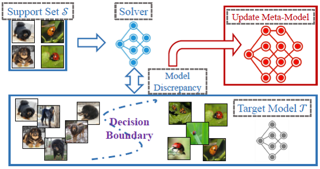
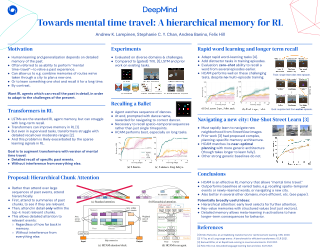
Reinforcement learning agents often forget details of the past, especially after delays or distractor tasks. Agents with common memory architectures struggle to recall and integrate across multiple timesteps of a past event, or even to recall the details of a single timestep that is followed by distractor tasks. To address these limitations, we propose a Hierarchical Chunk Attention Memory (HCAM), that helps agents to remember the past in detail. HCAM stores memories by dividing the past into chunks, and recalls by first performing high-level attention over coarse summaries of the chunks, and then performing detailed attention within only the most relevant chunks. An agent with HCAM can therefore "mentally time-travel"--remember past events in detail without attending to all intervening events. We show that agents with HCAM substantially outperform agents with other memory architectures at tasks requiring long-term recall, retention, or reasoning over memory. These include recalling where an object is hidden in a 3D environment, rapidly learning to navigate efficiently in a new neighborhood, and rapidly learning and retaining new words. Agents with HCAM can extrapolate to task sequences much longer than they were trained on, and can even generalize zero-shot from a meta-learning setting to maintaining knowledge across episodes. …
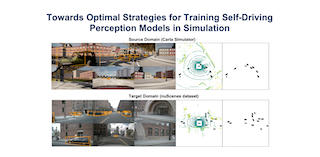
Autonomous driving relies on a huge volume of real-world data to be labeled to high precision. Alternative solutions seek to exploit driving simulators that can generate large amounts of labeled data with a plethora of content variations. However, the domain gap between the synthetic and real data remains, raising the following important question: What are the best way to utilize a self-driving simulator for perception tasks?. In this work, we build on top of recent advances in domain-adaptation theory, and from this perspective, propose ways to minimize the reality gap. We primarily focus on the use of labels in the synthetic domain alone. Our approach introduces both a principled way to learn neural-invariant representations and a theoretically inspired view on how to sample the data from the simulator. Our method is easy to implement in practice as it is agnostic of the network architecture and the choice of the simulator. We showcase our approach on the bird's-eye-view vehicle segmentation task with multi-sensor data (cameras, lidar) using an open-source simulator (CARLA), and evaluate the entire framework on a real-world dataset (nuScenes). Last but not least, we show what types of variations (e.g. weather conditions, number of assets, map design and color …
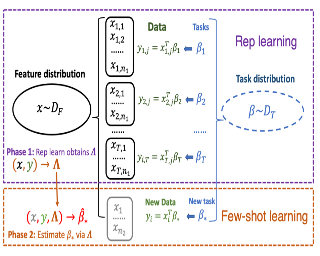
An overarching goal in machine learning is to build a generalizable model with few samples. To this end, overparameterization has been the subject of immense interest to explain the generalization ability of deep nets even when the size of the dataset is smaller than that of the model. While the prior literature focuses on the classical supervised setting, this paper aims to demystify overparameterization for meta-learning. Here we have a sequence of linear-regression tasks and we ask: (1) Given earlier tasks, what is the optimal linear representation of features for a new downstream task? and (2) How many samples do we need to build this representation? This work shows that surprisingly, overparameterization arises as a natural answer to these fundamental meta-learning questions. Specifically, for (1), we first show that learning the optimal representation coincides with the problem of designing a task-aware regularization to promote inductive bias. We leverage this inductive bias to explain how the downstream task actually benefits from overparameterization, in contrast to prior works on few-shot learning. For (2), we develop a theory to explain how feature covariance can implicitly help reduce the sample complexity well below the degrees of freedom and lead to small estimation error. We …
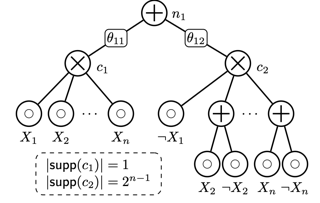
Probabilistic Circuits (PCs) are a promising avenue for probabilistic modeling. They combine advantages of probabilistic graphical models (PGMs) with those of neural networks (NNs). Crucially, however, they are tractable probabilistic models, supporting efficient and exact computation of many probabilistic inference queries, such as marginals and MAP. Further, since PCs are structured computation graphs, they can take advantage of deep-learning-style parameter updates, which greatly improves their scalability. However, this innovation also makes PCs prone to overfitting, which has been observed in many standard benchmarks. Despite the existence of abundant regularization techniques for both PGMs and NNs, they are not effective enough when applied to PCs. Instead, we re-think regularization for PCs and propose two intuitive techniques, data softening and entropy regularization, that both take advantage of PCs' tractability and still have an efficient implementation as a computation graph. Specifically, data softening provides a principled way to add uncertainty in datasets in closed form, which implicitly regularizes PC parameters. To learn parameters from a softened dataset, PCs only need linear time by virtue of their tractability. In entropy regularization, the exact entropy of the distribution encoded by a PC can be regularized directly, which is again infeasible for most other density estimation …
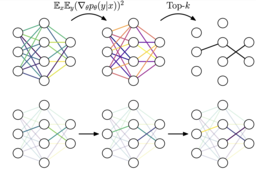
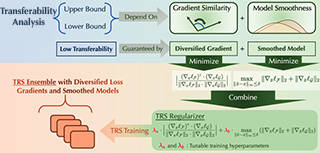
Adversarial Transferability is an intriguing property - adversarial perturbation crafted against one model is also effective against another model, while these models are from different model families or training processes. To better protect ML systems against adversarial attacks, several questions are raised: what are the sufficient conditions for adversarial transferability, and how to bound it? Is there a way to reduce the adversarial transferability in order to improve the robustness of an ensemble ML model? To answer these questions, in this work we first theoretically analyze and outline sufficient conditions for adversarial transferability between models; then propose a practical algorithm to reduce the transferability between base models within an ensemble to improve its robustness. Our theoretical analysis shows that only promoting the orthogonality between gradients of base models is not enough to ensure low transferability; in the meantime, the model smoothness is an important factor to control the transferability. We also provide the lower and upper bounds of adversarial transferability under certain conditions. Inspired by our theoretical analysis, we propose an effective Transferability Reduced Smooth (TRS) ensemble training strategy to train a robust ensemble with low transferability by enforcing both gradient orthogonality and model smoothness between base models. We conduct …
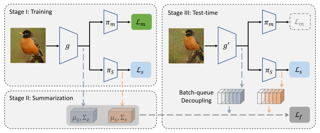
Test-time training (TTT) through self-supervised learning (SSL) is an emerging paradigm to tackle distributional shifts. Despite encouraging results, it remains unclear when this approach thrives or fails. In this work, we first provide an in-depth look at its limitations and show that TTT can possibly deteriorate, instead of improving, the test-time performance in the presence of severe distribution shifts. To address this issue, we introduce a test-time feature alignment strategy utilizing offline feature summarization and online moment matching, which regularizes adaptation without revisiting training data. We further scale this strategy in the online setting through batch-queue decoupling to enable robust moment estimates even with limited batch size. Given aligned feature distributions, we then shed light on the strong potential of TTT by theoretically analyzing its performance post adaptation. This analysis motivates our use of more informative self-supervision in the form of contrastive learning for visual recognition problems. We empirically demonstrate that our modified version of test-time training, termed TTT++, outperforms state-of-the-art methods by significant margins on several benchmarks. Our result indicates that storing and exploiting extra information, in addition to model parameters, can be a promising direction towards robust test-time adaptation.
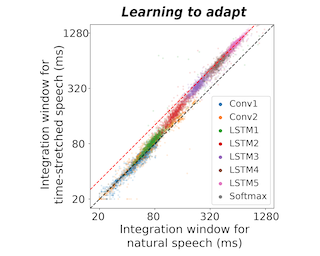
Natural signals such as speech are hierarchically structured across many different timescales, spanning tens (e.g., phonemes) to hundreds (e.g., words) of milliseconds, each of which is highly variable and context-dependent. While deep neural networks (DNNs) excel at recognizing complex patterns from natural signals, relatively little is known about how DNNs flexibly integrate across multiple timescales. Here, we show how a recently developed method for studying temporal integration in biological neural systems – the temporal context invariance (TCI) paradigm – can be used to understand temporal integration in DNNs. The method is simple: we measure responses to a large number of stimulus segments presented in two different contexts and estimate the smallest segment duration needed to achieve a context invariant response. We applied our method to understand how the popular DeepSpeech2 model learns to integrate across time in speech. We find that nearly all of the model units, even in recurrent layers, have a compact integration window within which stimuli substantially alter the response and outside of which stimuli have little effect. We show that training causes these integration windows to shrink at early layers and expand at higher layers, creating a hierarchy of integration windows across the network. Moreover, by …
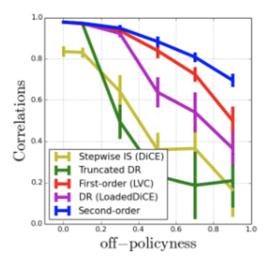
Model-agnostic meta-reinforcement learning requires estimating the Hessian matrix of value functions. This is challenging from an implementation perspective, as repeatedly differentiating policy gradient estimates may lead to biased Hessian estimates. In this work, we provide a unifying framework for estimating higher-order derivatives of value functions, based on off-policy evaluation. Our framework interprets a number of prior approaches as special cases and elucidates the bias and variance trade-off of Hessian estimates. This framework also opens the door to a new family of estimates, which can be easily implemented with auto-differentiation libraries, and lead to performance gains in practice.
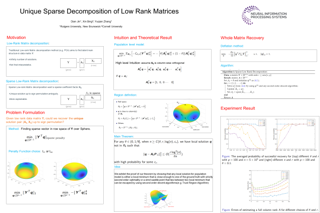

This paper presents a novel discriminator-constrained optimal transport network (DOTN) that performs unsupervised domain adaptation for speech enhancement (SE), which is an essential regression task in speech processing. The DOTN aims to estimate clean references of noisy speech in a target domain, by exploiting the knowledge available from the source domain. The domain shift between training and testing data has been reported to be an obstacle to learning problems in diverse fields. Although rich literature exists on unsupervised domain adaptation for classification, the methods proposed, especially in regressions, remain scarce and often depend on additional information regarding the input data. The proposed DOTN approach tactically fuses the optimal transport (OT) theory from mathematical analysis with generative adversarial frameworks, to help evaluate continuous labels in the target domain. The experimental results on two SE tasks demonstrate that by extending the classical OT formulation, our proposed DOTN outperforms previous adversarial domain adaptation frameworks in a purely unsupervised manner.
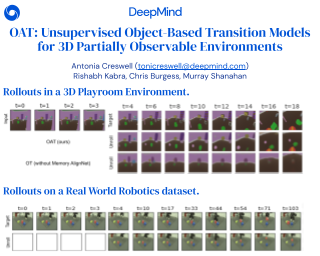
We present a slot-wise, object-based transition model that decomposes a scene into objects, aligns them (with respect to a slot-wise object memory) to maintain a consistent order across time, and predicts how those objects evolve over successive frames. The model is trained end-to-end without supervision using transition losses at the level of the object-structured representation rather than pixels. Thanks to the introduction of our novel alignment module, the model deals properly with two issues that are not handled satisfactorily by other transition models, namely object persistence and object identity. We show that the combination of an object-level loss and correct object alignment over time enables the model to outperform a state-of-the-art baseline, and allows it to deal well with object occlusion and re-appearance in partially observable environments.
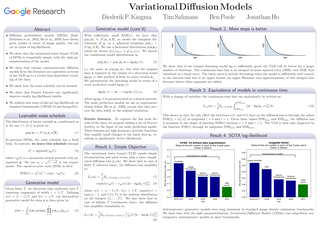
Diffusion-based generative models have demonstrated a capacity for perceptually impressive synthesis, but can they also be great likelihood-based models? We answer this in the affirmative, and introduce a family of diffusion-based generative models that obtain state-of-the-art likelihoods on standard image density estimation benchmarks. Unlike other diffusion-based models, our method allows for efficient optimization of the noise schedule jointly with the rest of the model. We show that the variational lower bound (VLB) simplifies to a remarkably short expression in terms of the signal-to-noise ratio of the diffused data, thereby improving our theoretical understanding of this model class. Using this insight, we prove an equivalence between several models proposed in the literature. In addition, we show that the continuous-time VLB is invariant to the noise schedule, except for the signal-to-noise ratio at its endpoints. This enables us to learn a noise schedule that minimizes the variance of the resulting VLB estimator, leading to faster optimization. Combining these advances with architectural improvements, we obtain state-of-the-art likelihoods on image density estimation benchmarks, outperforming autoregressive models that have dominated these benchmarks for many years, with often significantly faster optimization. In addition, we show how to use the model as part of a bits-back compression …
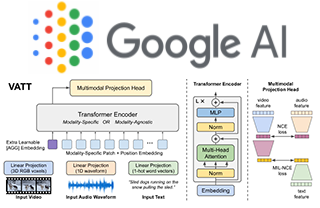
We present a framework for learning multimodal representations from unlabeled data using convolution-free Transformer architectures. Specifically, our Video-Audio-Text Transformer (VATT) takes raw signals as inputs and extracts multimodal representations that are rich enough to benefit a variety of downstream tasks. We train VATT end-to-end from scratch using multimodal contrastive losses and evaluate its performance by the downstream tasks of video action recognition, audio event classification, image classification, and text-to-video retrieval. Furthermore, we study a modality-agnostic single-backbone Transformer by sharing weights among the three modalities. We show that the convolution-free VATT outperforms state-of-the-art ConvNet-based architectures in the downstream tasks. Especially, VATT's vision Transformer achieves the top-1 accuracy of 82.1% on Kinetics-400, 83.6% on Kinetics-600, 72.7% on Kinetics-700, and 41.1% on Moments in Time, new records while avoiding supervised pre-training. Transferring to image classification leads to 78.7% top-1 accuracy on ImageNet compared to 64.7% by training the same Transformer from scratch, showing the generalizability of our model despite the domain gap between videos and images. VATT's audio Transformer also sets a new record on waveform-based audio event recognition by achieving the mAP of 39.4% on AudioSet without any supervised pre-training.

Gaussian processes are machine learning models capable of learning unknown functions in a way that represents uncertainty, thereby facilitating construction of optimal decision-making systems. Motivated by a desire to deploy Gaussian processes in novel areas of science, a rapidly-growing line of research has focused on constructively extending these models to handle non-Euclidean domains, including Riemannian manifolds, such as spheres and tori. We propose techniques that generalize this class to model vector fields on Riemannian manifolds, which are important in a number of application areas in the physical sciences. To do so, we present a general recipe for constructing gauge independent kernels, which induce Gaussian vector fields, i.e. vector-valued Gaussian processes coherent withgeometry, from scalar-valued Riemannian kernels. We extend standard Gaussian process training methods, such as variational inference, to this setting. This enables vector-valued Gaussian processes on Riemannian manifolds to be trained using standard methods and makes them accessible to machine learning practitioners.
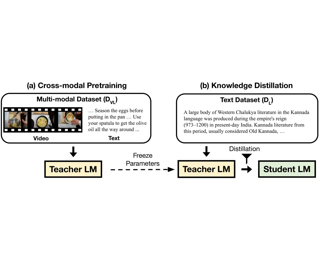
Since visual perception can give rich information beyond text descriptions for world understanding, there has been increasing interest in leveraging visual grounding for language learning. Recently, vokenization (Tan and Bansal, 2020) has attracted attention by using the predictions of a text-to-image retrieval model as labels for language model supervision. Despite its success, the method suffers from approximation error of using finite image labels and the lack of vocabulary diversity of a small image-text dataset. To overcome these limitations, we present VidLanKD, a video-language knowledge distillation method for improving language understanding. We train a multi-modal teacher model on a video-text dataset, and then transfer its knowledge to a student language model with a text dataset. To avoid approximation error, we propose to use different knowledge distillation objectives. In addition, the use of a large-scale video-text dataset helps learn diverse and richer vocabularies. In our experiments, VidLanKD achieves consistent improvements over text-only language models and vokenization models, on several downstream language understanding tasks including GLUE, SQuAD, and SWAG. We also demonstrate the improved world knowledge, physical reasoning, and temporal reasoning capabilities of our model by evaluating on the GLUE-diagnostics, PIQA, and TRACIE datasets. Lastly, we present comprehensive ablation studies as well as …
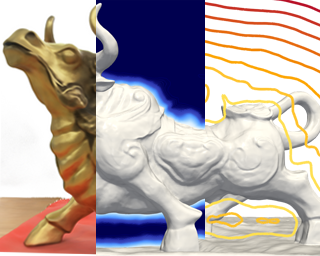
Neural volume rendering became increasingly popular recently due to its success in synthesizing novel views of a scene from a sparse set of input images. So far, the geometry learned by neural volume rendering techniques was modeled using a generic density function. Furthermore, the geometry itself was extracted using an arbitrary level set of the density function leading to a noisy, often low fidelity reconstruction.The goal of this paper is to improve geometry representation and reconstruction in neural volume rendering. We achieve that by modeling the volume density as a function of the geometry. This is in contrast to previous work modeling the geometry as a function of the volume density. In more detail, we define the volume density function as Laplace's cumulative distribution function (CDF) applied to a signed distance function (SDF) representation. This simple density representation has three benefits: (i) it provides a useful inductive bias to the geometry learned in the neural volume rendering process; (ii) it facilitates a bound on the opacity approximation error, leading to an accurate sampling of the viewing ray. Accurate sampling is important to provide a precise coupling of geometry and radiance; and (iii) it allows efficient unsupervised disentanglement of shape and …
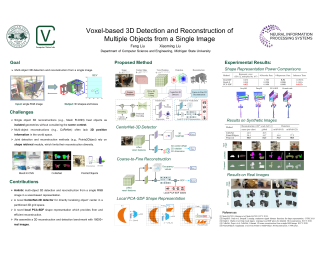
Inferring 3D locations and shapes of multiple objects from a single 2D image is a long-standing objective of computer vision. Most of the existing works either predict one of these 3D properties or focus on solving both for a single object. One fundamental challenge lies in how to learn an effective representation of the image that is well-suited for 3D detection and reconstruction. In this work, we propose to learn a regular grid of 3D voxel features from the input image which is aligned with 3D scene space via a 3D feature lifting operator. Based on the 3D voxel features, our novel CenterNet-3D detection head formulates the 3D detection as keypoint detection in the 3D space. Moreover, we devise an efficient coarse-to-fine reconstruction module, including coarse-level voxelization and a novel local PCA-SDF shape representation, which enables fine detail reconstruction and two orders of magnitude faster inference than prior methods. With complementary supervision from both 3D detection and reconstruction, one enables the 3D voxel features to be geometry and context preserving, benefiting both tasks. The effectiveness of our approach is demonstrated through 3D detection and reconstruction on single-object and multiple-object scenarios.
Graph Neural Networks (GNNs) are limited in their expressive power, struggle with long-range interactions and lack a principled way to model higher-order structures. These problems can be attributed to the strong coupling between the computational graph and the input graph structure. The recently proposed Message Passing Simplicial Networks naturally decouple these elements by performing message passing on the clique complex of the graph. Nevertheless, these models can be severely constrained by the rigid combinatorial structure of Simplicial Complexes (SCs). In this work, we extend recent theoretical results on SCs to regular Cell Complexes, topological objects that flexibly subsume SCs and graphs. We show that this generalisation provides a powerful set of graph "lifting" transformations, each leading to a unique hierarchical message passing procedure. The resulting methods, which we collectively call CW Networks (CWNs), are strictly more powerful than the WL test and not less powerful than the 3-WL test. In particular, we demonstrate the effectiveness of one such scheme, based on rings, when applied to molecular graph problems. The proposed architecture benefits from provably larger expressivity than commonly used GNNs, principled modelling of higher-order signals and from compressing the distances between nodes. We demonstrate that our model achieves state-of-the-art results …
Contrastive learning (CL) can learn generalizable feature representations and achieve state-of-the-art performance of downstream tasks by finetuning a linear classifier on top of it. However, as adversarial robustness becomes vital in image classification, it remains unclear whether or not CL is able to preserve robustness to downstream tasks. The main challenge is that in the self-supervised pretraining + supervised finetuning paradigm, adversarial robustness is easily forgotten due to a learning task mismatch from pretraining to finetuning. We call such challenge 'cross-task robustness transferability'. To address the above problem, in this paper we revisit and advance CL principles through the lens of robustness enhancement. We show that (1) the design of contrastive views matters: High-frequency components of images are beneficial to improving model robustness; (2) Augmenting CL with pseudo-supervision stimulus (e.g., resorting to feature clustering) helps preserve robustness without forgetting. Equipped with our new designs, we propose AdvCL, a novel adversarial contrastive pretraining framework. We show that AdvCL is able to enhance cross-task robustness transferability without loss of model accuracy and finetuning efficiency. With a thorough experimental study, we demonstrate that AdvCL outperforms the state-of-the-art self-supervised robust learning methods across multiple datasets (CIFAR-10, CIFAR-100, and STL-10) and finetuning schemes (linear evaluation …

Generalization is a central challenge for the deployment of reinforcement learning (RL) systems in the real world. In this paper, we show that the sequential structure of the RL problem necessitates new approaches to generalization beyond the well-studied techniques used in supervised learning. While supervised learning methods can generalize effectively without explicitly accounting for epistemic uncertainty, we describe why appropriate uncertainty handling can actually be essential in RL. We show that generalization to unseen test conditions from a limited number of training conditions induces a kind of implicit partial observability, effectively turning even fully-observed MDPs into POMDPs. Informed by this observation, we recast the problem of generalization in RL as solving the induced partially observed Markov decision process, which we call the epistemic POMDP. We demonstrate the failure modes of algorithms that do not appropriately handle this partial observability, and suggest a simple ensemble-based technique for approximately solving the partially observed problem. Empirically, we demonstrate that our simple algorithm derived from the epistemic POMDP achieves significant gains in generalization over current methods on the Procgen benchmark suite.
We consider two-alternative elections where voters' preferences depend on a state variable that is not directly observable. Each voter receives a private signal that is correlated to the state variable. As a special case, our model captures the common scenario where voters can be categorized into three types: those who always prefer one alternative, those who always prefer the other, and those contingent voters whose preferences depends on the state. In this setting, even if every voter is a contingent voter, agents voting according to their private information need not result in the adoption of the universally preferred alternative, because the signals can be systematically biased.We present a mechanism that elicits and aggregates the private signals from the voters, and outputs the alternative that is favored by the majority. In particular, voters truthfully reporting their signals forms a strong Bayes Nash equilibrium (where no coalition of voters can deviate and receive a better outcome).
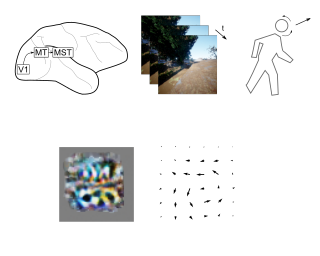
Neurons in the dorsal visual pathway of the mammalian brain are selective for motion stimuli, with the complexity of stimulus representations increasing along the hierarchy. This progression is similar to that of the ventral visual pathway, which is well characterized by artificial neural networks (ANNs) optimized for object recognition. In contrast, there are no image-computable models of the dorsal stream with comparable explanatory power. We hypothesized that the properties of dorsal stream neurons could be explained by a simple learning objective: the need for an organism to orient itself during self-motion. To test this hypothesis, we trained a 3D ResNet to predict an agent's self-motion parameters from visual stimuli in a simulated environment. We found that the responses in this network accounted well for the selectivity of neurons in a large database of single-neuron recordings from the dorsal visual stream of non-human primates. In contrast, ANNs trained on an action recognition dataset through supervised or self-supervised learning could not explain responses in the dorsal stream, despite also being trained on naturalistic videos with moving objects. These results demonstrate that an ecologically relevant cost function can account for dorsal stream properties in the primate brain.
Datasets and Benchmarks: Dataset and Benchmark Poster Session 1 Tue 7 Dec 08:30 a.m.
The Datasets and Benchmarks track serves as a novel venue for high-quality publications, talks, and posters on highly valuable machine learning datasets and benchmarks, as well as a forum for discussions on how to improve dataset development. Datasets and benchmarks are crucial for the development of machine learning methods, but also require their own publishing and reviewing guidelines. For instance, datasets can often not be reviewed in a double-blind fashion, and hence full anonymization will not be required. On the other hand, they do require additional specific checks, such as a proper description of how the data was collected, whether they show intrinsic bias, and whether they will remain accessible.
Affinity Workshop: LatinX in AI (LXAI) Research @ NeurIPS 2021 Tue 7 Dec 10:00 a.m.
The workshop is a one-day event with invited speakers, oral presentations, and posters. The event brings together faculty, graduate students, research scientists, and engineers for an opportunity to connect and exchange ideas. There will be a panel discussion and a mentoring session to discuss current research trends and career choices in artificial intelligence and machine learning. While all presenters will identify primarily as latinx, all are invited to attend.
Competition Track Day 1: Overviews + Breakout Sessions Tue 7 Dec 10:00 a.m.
The program includes a wide variety of exciting competitions in different domains, with some focusing more on applications and others trying to unify fields, focusing on technical challenges or directly tackling important problems in the world. The aim is for the broad program to make it so that anyone who wants to work on or learn from a competition can find something to their liking.
In this session, we have the following competitions:
* The Open Catalyst Challenge
* The Robustness and Uncertainty under Real-World Distributional Shifts Challenge
* VisDA21: Visual Domain Adaptation
* HEAR 2021: Holistic Evaluation of Audio Representations
* The WebQA Competition
* Diamond: A MineRL Competition on Training Sample-Efficient Agents
Affinity Workshop: New in ML 2 Tue 7 Dec 11:00 a.m.
Is this your first time to a top conference? Have you ever wanted your own work recognized by this huge and active community? Do you encounter difficulties in polishing your ideas, experiments, paper writing, etc? Then, this session is exactly for you!
This year, we are organizing the New in ML workshop, co-locating with NeurIPS 2021. We are targeting anyone who has not published a paper at the NeurIPS main conference yet. We invited top researchers to review your work and share with you their experience. The best papers will get oral presentations!
Our biggest goal is to help you publish papers at next year’s NeurIPS conference, and generally provide you with the guidance you need to contribute to ML research fully and effectively!
Invited Talk: Mary L. Gray
If data is power, this keynote asks what methodologies and frameworks, beyond measuring bias and fairness in ML, might best serve communities that are, otherwise, written off as inevitable ‘data gaps?’ To address this question, the talk applies design justice principles articulated in 2020 by scholar Costanza-Chock to the case of community-based organizations (CBOs) serving marginalized Black and Latinx communities in North Carolina. These CBOs, part of an 8-month study of community healthcare work, have become pivotal conduits for COVID-19 health information and equitable vaccine access. As such, they create and collect the so-called ‘sparse data’ of marginalized groups often missing from healthcare analyses. How might health equity—a cornerstone of social justice—be better served by equipping CBOs to collect community-level data and set the agendas for what to share and learn from the people that they serve? The talk will open with an analysis of the limits of ML models that prioritize the efficiencies of scale over attention to just and inclusive sampling. It will then examine how undertheorized investments in measuring bias and fairness in data and decision-making systems distract us from considering the value of collecting data with rather than for communities. Outlining an early learning theory proposed by Russian psychologist Lev Vygotsky (1978), the presentation will argue that focusing on the demands of collecting community members’ data and observing the social interactions that are computationally hard to measure but qualitatively invaluable to see are necessary to advance socially-just ML. The talk will conclude with recommendations for how to reorient computer science and machine learning to a more explicit theory and practice of data power-sharing.
Bio :
Poster Session 2 Tue 7 Dec 04:30 p.m.
[ Virtual ]
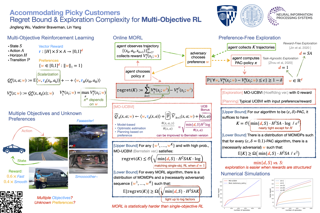
[ Virtual ]
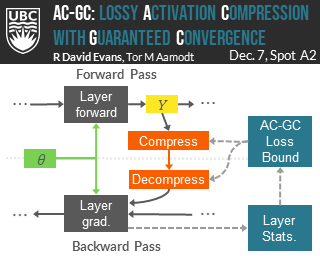
Parallel hardware devices (e.g., graphics processor units) have limited high-bandwidth memory capacity.This negatively impacts the training of deep neural networks (DNNs) by increasing runtime and/or decreasing accuracy when reducing model and/or batch size to fit this capacity. Lossy compression is a promising approach to tackling memory capacity constraints, but prior approaches rely on hyperparameter search to achieve a suitable trade-off between convergence and compression, negating runtime benefits. In this paper we build upon recent developments on Stochastic Gradient Descent convergence to prove an upper bound on the expected loss increase when training with compressed activation storage. We then express activation compression error in terms of this bound, allowing the compression rate to adapt to training conditions automatically. The advantage of our approach, called AC-GC, over existing lossy compression frameworks is that, given a preset allowable increase in loss, significant compression without significant increase in error can be achieved with a single training run. When combined with error-bounded methods, AC-GC achieves 15.1x compression with an average accuracy change of 0.1% on text and image datasets. AC-GC functions on any model composed of the layers analyzed and, by avoiding compression rate search, reduces overall training time by 4.6x over SuccessiveHalving.
[ Virtual ]
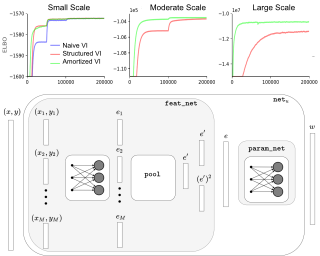
It is difficult to use subsampling with variational inference in hierarchical models since the number of local latent variables scales with the dataset. Thus, inference in hierarchical models remains a challenge at a large scale. It is helpful to use a variational family with a structure matching the posterior, but optimization is still slow due to the huge number of local distributions. Instead, this paper suggests an amortized approach where shared parameters simultaneously represent all local distributions. This approach is similarly accurate as using a given joint distribution (e.g., a full-rank Gaussian) but is feasible on datasets that are several orders of magnitude larger. It is also dramatically faster than using a structured variational distribution.
[ Virtual ]

Data augmentation is a simple yet effective way to improve the robustness of deep neural networks (DNNs). Diversity and hardness are two complementary dimensions of data augmentation to achieve robustness. For example, AugMix explores random compositions of a diverse set of augmentations to enhance broader coverage, while adversarial training generates adversarially hard samples to spot the weakness. Motivated by this, we propose a data augmentation framework, termed AugMax, to unify the two aspects of diversity and hardness. AugMax first randomly samples multiple augmentation operators and then learns an adversarial mixture of the selected operators. Being a stronger form of data augmentation, AugMax leads to a significantly augmented input distribution which makes model training more challenging. To solve this problem, we further design a disentangled normalization module, termed DuBIN (Dual-Batch-and-Instance Normalization), that disentangles the instance-wise feature heterogeneity arising from AugMax. Experiments show that AugMax-DuBIN leads to significantly improved out-of-distribution robustness, outperforming prior arts by 3.03%, 3.49%, 1.82% and 0.71% on CIFAR10-C, CIFAR100-C, Tiny ImageNet-C and ImageNet-C. Codes and pretrained models are available: https://github.com/VITA-Group/AugMax.
[ Virtual ]
[ Virtual ]
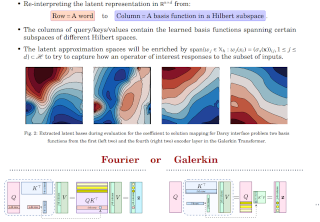
In this paper, we apply the self-attention from the state-of-the-art Transformer in Attention Is All You Need for the first time to a data-driven operator learning problem related to partial differential equations. An effort is put together to explain the heuristics of, and to improve the efficacy of the attention mechanism. By employing the operator approximation theory in Hilbert spaces, it is demonstrated for the first time that the softmax normalization in the scaled dot-product attention is sufficient but not necessary. Without softmax, the approximation capacity of a linearized Transformer variant can be proved to be comparable to a Petrov-Galerkin projection layer-wise, and the estimate is independent with respect to the sequence length. A new layer normalization scheme mimicking the Petrov-Galerkin projection is proposed to allow a scaling to propagate through attention layers, which helps the model achieve remarkable accuracy in operator learning tasks with unnormalized data. Finally, we present three operator learning experiments, including the viscid Burgers' equation, an interface Darcy flow, and an inverse interface coefficient identification problem. The newly proposed simple attention-based operator learner, Galerkin Transformer, shows significant improvements in both training cost and evaluation accuracy over its softmax-normalized counterparts.
[ Virtual ]
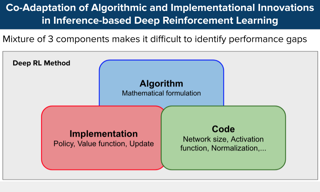
Recently many algorithms were devised for reinforcement learning (RL) with function approximation. While they have clear algorithmic distinctions, they also have many implementation differences that are algorithm-independent and sometimes under-emphasized. Such mixing of algorithmic novelty and implementation craftsmanship makes rigorous analyses of the sources of performance improvements across algorithms difficult. In this work, we focus on a series of off-policy inference-based actor-critic algorithms -- MPO, AWR, and SAC -- to decouple their algorithmic innovations and implementation decisions. We present unified derivations through a single control-as-inference objective, where we can categorize each algorithm as based on either Expectation-Maximization (EM) or direct Kullback-Leibler (KL) divergence minimization and treat the rest of specifications as implementation details. We performed extensive ablation studies, and identified substantial performance drops whenever implementation details are mismatched for algorithmic choices. These results show which implementation or code details are co-adapted and co-evolved with algorithms, and which are transferable across algorithms: as examples, we identified that tanh Gaussian policy and network sizes are highly adapted to algorithmic types, while layer normalization and ELU are critical for MPO's performances but also transfer to noticeable gains in SAC. We hope our work can inspire future work to further demystify sources of performance …
[ Virtual ]
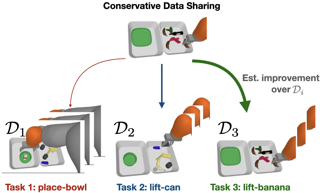
Offline reinforcement learning (RL) algorithms have shown promising results in domains where abundant pre-collected data is available. However, prior methods focus on solving individual problems from scratch with an offline dataset without considering how an offline RL agent can acquire multiple skills. We argue that a natural use case of offline RL is in settings where we can pool large amounts of data collected in various scenarios for solving different tasks, and utilize all of this data to learn behaviors for all the tasks more effectively rather than training each one in isolation. However, sharing data across all tasks in multi-task offline RL performs surprisingly poorly in practice. Thorough empirical analysis, we find that sharing data can actually exacerbate the distributional shift between the learned policy and the dataset, which in turn can lead to divergence of the learned policy and poor performance. To address this challenge, we develop a simple technique for data- sharing in multi-task offline RL that routes data based on the improvement over the task-specific data. We call this approach conservative data sharing (CDS), and it can be applied with multiple single-task offline RL methods. On a range of challenging multi-task locomotion, navigation, and vision-based robotic …
[ Virtual ]
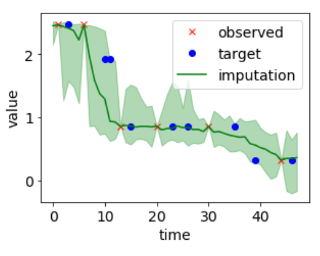
The imputation of missing values in time series has many applications in healthcare and finance. While autoregressive models are natural candidates for time series imputation, score-based diffusion models have recently outperformed existing counterparts including autoregressive models in many tasks such as image generation and audio synthesis, and would be promising for time series imputation. In this paper, we propose Conditional Score-based Diffusion model (CSDI), a novel time series imputation method that utilizes score-based diffusion models conditioned on observed data. Unlike existing score-based approaches, the conditional diffusion model is explicitly trained for imputation and can exploit correlations between observed values. On healthcare and environmental data, CSDI improves by 40-65% over existing probabilistic imputation methods on popular performance metrics. In addition, deterministic imputation by CSDI reduces the error by 5-20% compared to the state-of-the-art deterministic imputation methods. Furthermore, CSDI can also be applied to time series interpolation and probabilistic forecasting, and is competitive with existing baselines. The code is available at https://github.com/ermongroup/CSDI.
[ Virtual ]
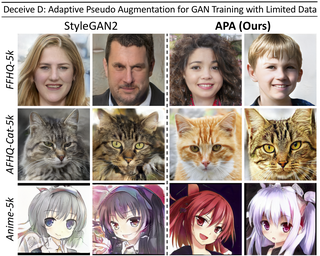
Generative adversarial networks (GANs) typically require ample data for training in order to synthesize high-fidelity images. Recent studies have shown that training GANs with limited data remains formidable due to discriminator overfitting, the underlying cause that impedes the generator's convergence. This paper introduces a novel strategy called Adaptive Pseudo Augmentation (APA) to encourage healthy competition between the generator and the discriminator. As an alternative method to existing approaches that rely on standard data augmentations or model regularization, APA alleviates overfitting by employing the generator itself to augment the real data distribution with generated images, which deceives the discriminator adaptively. Extensive experiments demonstrate the effectiveness of APA in improving synthesis quality in the low-data regime. We provide a theoretical analysis to examine the convergence and rationality of our new training strategy. APA is simple and effective. It can be added seamlessly to powerful contemporary GANs, such as StyleGAN2, with negligible computational cost. Code: https://github.com/EndlessSora/DeceiveD.
[ Virtual ]
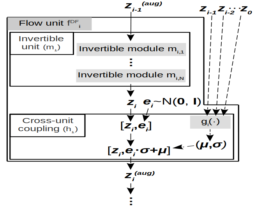
Normalizing flows are bijective mappings between inputs and latent representations with a fully factorized distribution. They are very attractive due to exact likelihood evaluation and efficient sampling. However, their effective capacity is often insufficient since the bijectivity constraint limits the model width. We address this issue by incrementally padding intermediate representations with noise. We precondition the noise in accordance with previous invertible units, which we describe as cross-unit coupling. Our invertible glow-like modules increase the model expressivity by fusing a densely connected block with Nyström self-attention. We refer to our architecture as DenseFlow since both cross-unit and intra-module couplings rely on dense connectivity. Experiments show significant improvements due to the proposed contributions and reveal state-of-the-art density estimation under moderate computing budgets.
[ Virtual ]

The Transformer architecture has become a dominant choice in many domains, such as natural language processing and computer vision. Yet, it has not achieved competitive performance on popular leaderboards of graph-level prediction compared to mainstream GNN variants. Therefore, it remains a mystery how Transformers could perform well for graph representation learning. In this paper, we solve this mystery by presenting Graphormer, which is built upon the standard Transformer architecture, and could attain excellent results on a broad range of graph representation learning tasks, especially on the recent OGB Large-Scale Challenge. Our key insight to utilizing Transformer in the graph is the necessity of effectively encoding the structural information of a graph into the model. To this end, we propose several simple yet effective structural encoding methods to help Graphormer better model graph-structured data. Besides, we mathematically characterize the expressive power of Graphormer and exhibit that with our ways of encoding the structural information of graphs, many popular GNN variants could be covered as the special cases of Graphormer. The code and models of Graphormer will be made publicly available at \url{https://github.com/Microsoft/Graphormer}.
[ Virtual ]
A backdoor data poisoning attack is an adversarial attack wherein the attacker injects several watermarked, mislabeled training examples into a training set. The watermark does not impact the test-time performance of the model on typical data; however, the model reliably errs on watermarked examples.To gain a better foundational understanding of backdoor data poisoning attacks, we present a formal theoretical framework within which one can discuss backdoor data poisoning attacks for classification problems. We then use this to analyze important statistical and computational issues surrounding these attacks.On the statistical front, we identify a parameter we call the memorization capacity that captures the intrinsic vulnerability of a learning problem to a backdoor attack. This allows us to argue about the robustness of several natural learning problems to backdoor attacks. Our results favoring the attacker involve presenting explicit constructions of backdoor attacks, and our robustness results show that some natural problem settings cannot yield successful backdoor attacks.From a computational standpoint, we show that under certain assumptions, adversarial training can detect the presence of backdoors in a training set. We then show that under similar assumptions, two closely related problems we call backdoor filtering and robust generalization are nearly equivalent. This implies that it …
[ Virtual ]
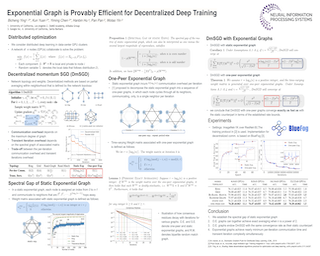
[ Virtual ]
[ Virtual ]
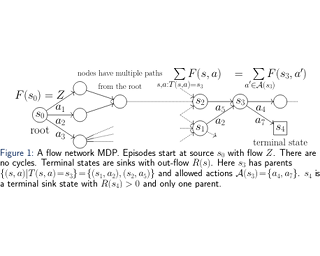
This paper is about the problem of learning a stochastic policy for generating an object (like a molecular graph) from a sequence of actions, such that the probability of generating an object is proportional to a given positive reward for that object. Whereas standard return maximization tends to converge to a single return-maximizing sequence, there are cases where we would like to sample a diverse set of high-return solutions. These arise, for example, in black-box function optimization when few rounds are possible, each with large batches of queries, where the batches should be diverse, e.g., in the design of new molecules. One can also see this as a problem of approximately converting an energy function to a generative distribution. While MCMC methods can achieve that, they are expensive and generally only perform local exploration. Instead, training a generative policy amortizes the cost of search during training and yields to fast generation. Using insights from Temporal Difference learning, we propose GFlowNet, based on a view of the generative process as a flow network, making it possible to handle the tricky case where different trajectories can yield the same final state, e.g., there are many ways to sequentially add atoms to generate …
[ Virtual ]
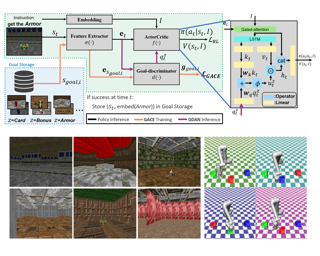
Learning in a multi-target environment without prior knowledge about the targets requires a large amount of samples and makes generalization difficult. To solve this problem, it is important to be able to discriminate targets through semantic understanding. In this paper, we propose goal-aware cross-entropy (GACE) loss, that can be utilized in a self-supervised way using auto-labeled goal states alongside reinforcement learning. Based on the loss, we then devise goal-discriminative attention networks (GDAN) which utilize the goal-relevant information to focus on the given instruction. We evaluate the proposed methods on visual navigation and robot arm manipulation tasks with multi-target environments and show that GDAN outperforms the state-of-the-art methods in terms of task success ratio, sample efficiency, and generalization. Additionally, qualitative analyses demonstrate that our proposed method can help the agent become aware of and focus on the given instruction clearly, promoting goal-directed behavior.
[ Virtual ]
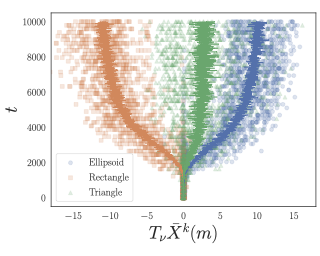
Understanding the training dynamics of deep learning models is perhaps a necessary step toward demystifying the effectiveness of these models. In particular, how do training data from different classes gradually become separable in their feature spaces when training neural networks using stochastic gradient descent? In this paper, we model the evolution of features during deep learning training using a set of stochastic differential equations (SDEs) that each corresponding to a training sample. As a crucial ingredient in our modeling strategy, each SDE contains a drift term that reflects the impact of backpropagation at an input on the features of all samples. Our main finding uncovers a sharp phase transition phenomenon regarding the intra-class impact: if the SDEs are locally elastic in the sense that the impact is more significant on samples from the same class as the input, the features of training data become linearly separable---meaning vanishing training loss; otherwise, the features are not separable, no matter how long the training time is. In the presence of local elasticity, moreover, an analysis of our SDEs shows the emergence of a simple geometric structure called neural collapse of the features. Taken together, our results shed light on the decisive role of …
[ Virtual ]

[ Virtual ]
The prevalence of graph-based data has spurred the rapid development of graph neural networks (GNNs) and related machine learning algorithms. Yet, despite the many datasets naturally modeled as directed graphs, including citation, website, and traffic networks, the vast majority of this research focuses on undirected graphs. In this paper, we propose MagNet, a GNN for directed graphs based on a complex Hermitian matrix known as the magnetic Laplacian. This matrix encodes undirected geometric structure in the magnitude of its entries and directional information in their phase. A charge parameter attunes spectral information to variation among directed cycles. We apply our network to a variety of directed graph node classification and link prediction tasks showing that MagNet performs well on all tasks and that its performance exceeds all other methods on a majority of such tasks. The underlying principles of MagNet are such that it can be adapted to other GNN architectures.
[ Virtual ]
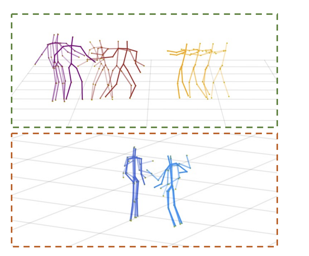
We propose a novel framework for multi-person 3D motion trajectory prediction. Our key observation is that a human's action and behaviors may highly depend on the other persons around. Thus, instead of predicting each human pose trajectory in isolation, we introduce a Multi-Range Transformers model which contains of a local-range encoder for individual motion and a global-range encoder for social interactions. The Transformer decoder then performs prediction for each person by taking a corresponding pose as a query which attends to both local and global-range encoder features. Our model not only outperforms state-of-the-art methods on long-term 3D motion prediction, but also generates diverse social interactions. More interestingly, our model can even predict 15-person motion simultaneously by automatically dividing the persons into different interaction groups. Project page with code is available at https://jiashunwang.github.io/MRT/.
[ Virtual ]
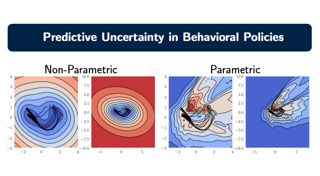
KL-regularized reinforcement learning from expert demonstrations has proved successful in improving the sample efficiency of deep reinforcement learning algorithms, allowing them to be applied to challenging physical real-world tasks. However, we show that KL-regularized reinforcement learning with behavioral reference policies derived from expert demonstrations can suffer from pathological training dynamics that can lead to slow, unstable, and suboptimal online learning. We show empirically that the pathology occurs for commonly chosen behavioral policy classes and demonstrate its impact on sample efficiency and online policy performance. Finally, we show that the pathology can be remedied by non-parametric behavioral reference policies and that this allows KL-regularized reinforcement learning to significantly outperform state-of-the-art approaches on a variety of challenging locomotion and dexterous hand manipulation tasks.
[ Virtual ]
This paper leverages machine-learned predictions to design competitive algorithms for online conversion problems with the goal of improving the competitive ratio when predictions are accurate (i.e., consistency), while also guaranteeing a worst-case competitive ratio regardless of the prediction quality (i.e., robustness). We unify the algorithmic design of both integral and fractional conversion problems, which are also known as the 1-max-search and one-way trading problems, into a class of online threshold-based algorithms (OTA). By incorporating predictions into design of OTA, we achieve the Pareto-optimal trade-off of consistency and robustness, i.e., no online algorithm can achieve a better consistency guarantee given for a robustness guarantee. We demonstrate the performance of OTA using numerical experiments on Bitcoin conversion.
[ Virtual ]
Episodic event memory is a key component of human cognition. Predicting event memorability,i.e., to what extent an event is recalled, is a tough challenge in memory research and has profound implications for artificial intelligence. In this study, we investigate factors that affect event memorability according to a cued recall process. Specifically, we explore whether event memorability is contingent on the event context, as well as the intrinsic visual attributes of image cues. We design a novel experiment protocol and conduct a large-scale experiment with 47 elder subjects over 3 months. Subjects’ memory of life events is tested in a cued recall process. Using advanced visual analytics methods, we build a first-of-its-kind event memorability dataset (called R3) with rich information about event context and visual semantic features. Furthermore, we propose a contextual event memory network (CEMNet) that tackles multi-modal input to predict item-wise event memorability, which outperforms competitive benchmarks. The findings inform deeper understanding of episodic event memory, and open up a new avenue for prediction of human episodic memory. Source code is available at https://github.com/ffzzy840304/Predicting-Event-Memorability.
[ Virtual ]
[ Virtual ]

[ Virtual ]
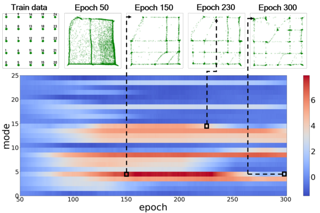
Despite remarkable performance in producing realistic samples, Generative Adversarial Networks (GANs) often produce low-quality samples near low-density regions of the data manifold, e.g., samples of minor groups. Many techniques have been developed to improve the quality of generated samples, either by post-processing generated samples or by pre-processing the empirical data distribution, but at the cost of reduced diversity. To promote diversity in sample generation without degrading the overall quality, we propose a simple yet effective method to diagnose and emphasize underrepresented samples during training of a GAN. The main idea is to use the statistics of the discrepancy between the data distribution and the model distribution at each data instance. Based on the observation that the underrepresented samples have a high average discrepancy or high variability in discrepancy, we propose a method to emphasize those samples during training of a GAN. Our experimental results demonstrate that the proposed method improves GAN performance on various datasets, and it is especially effective in improving the quality and diversity of sample generation for minor groups.
[ Virtual ]
In this paper, we propose a self-supervised learning procedure for training a robust multi-object tracking (MOT) model given only unlabeled video. While several self-supervisory learning signals have been proposed in prior work on single-object tracking, such as color propagation and cycle-consistency, these signals are not effective for training RNN models, which are needed to achieve accurate MOT: they yield degenerate models that, for instance, always match new detections to tracks with the closest initial detections. We propose a novel self-supervisory signal that we call cross-input consistency: we construct two distinct inputs for the same sequence of video, by hiding different information about the sequence in each input. We then compute tracks in that sequence by applying an RNN model independently on each input, and train the model to produce consistent tracks across the two inputs. We evaluate our unsupervised method on MOT17 and KITTI --- remarkably, we find that, despite training only on unlabeled video, our unsupervised approach outperforms four supervised methods published in the last 1--2 years, including Tracktor++, FAMNet, GSM, and mmMOT.
[ Virtual ]
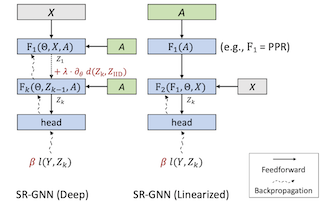
There has been a recent surge of interest in designing Graph Neural Networks (GNNs) for semi-supervised learning tasks. Unfortunately this work has assumed that the nodes labeled for use in training were selected uniformly at random (i.e. are an IID sample). However in many real world scenarios gathering labels for graph nodes is both expensive and inherently biased -- so this assumption can not be met. GNNs can suffer poor generalization when this occurs, by overfitting to superfluous regularities present in the training data. In this work we present a method, Shift-Robust GNN (SR-GNN), designed to account for distributional differences between biased training data and the graph's true inference distribution. SR-GNN adapts GNN models for the presence of distributional shifts between the nodes which have had labels provided for training and the rest of the dataset. We illustrate the effectiveness of SR-GNN in a variety of experiments with biased training datasets on common GNN benchmark datasets for semi-supervised learning, where we see that SR-GNN outperforms other GNN baselines by accuracy, eliminating at least (~40%) of the negative effects introduced by biased training data. On the largest dataset we consider, ogb-arxiv, we observe an 2% absolute improvement over the baseline and …
[ Virtual ]
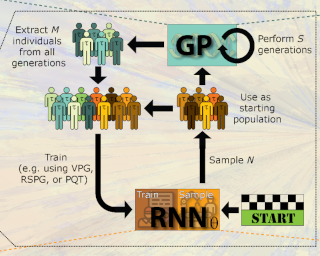
Symbolic regression is the process of identifying mathematical expressions that fit observed output from a black-box process. It is a discrete optimization problem generally believed to be NP-hard. Prior approaches to solving the problem include neural-guided search (e.g. using reinforcement learning) and genetic programming. In this work, we introduce a hybrid neural-guided/genetic programming approach to symbolic regression and other combinatorial optimization problems. We propose a neural-guided component used to seed the starting population of a random restart genetic programming component, gradually learning better starting populations. On a number of common benchmark tasks to recover underlying expressions from a dataset, our method recovers 65% more expressions than a recently published top-performing model using the same experimental setup. We demonstrate that running many genetic programming generations without interdependence on the neural-guided component performs better for symbolic regression than alternative formulations where the two are more strongly coupled. Finally, we introduce a new set of 22 symbolic regression benchmark problems with increased difficulty over existing benchmarks. Source code is provided at www.github.com/brendenpetersen/deep-symbolic-optimization.
[ Virtual ]
Humans can easily detect and segment moving objects simply by observing how they move, even without knowledge of object semantics. Inspired by this, we develop a zero-shot unsupervised approach for learning object segmentations. The model comprises two visual pathways: an appearance pathway that segments individual RGB images into coherent object regions, and a motion pathway that predicts the flow vector for each region between consecutive video frames. The two pathways jointly reconstruct a new representation called segment flow. This decoupled representation of appearance and motion is trained in a self-supervised manner to reconstruct one frame from another.When pretrained on an unlabeled video corpus, the model can be useful for a variety of applications, including 1) primary object segmentation from a single image in a zero-shot fashion; 2) moving object segmentation from a video with unsupervised test-time adaptation; 3) image semantic segmentation by supervised fine-tuning on a labeled image dataset. We demonstrate encouraging experimental results on all of these tasks using pretrained models.
[ Virtual ]
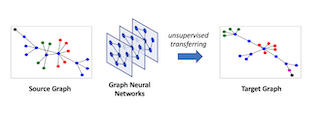
Graph neural networks (GNNs) have achieved superior performance in various applications, but training dedicated GNNs can be costly for large-scale graphs. Some recent work started to study the pre-training of GNNs. However, none of them provide theoretical insights into the design of their frameworks, or clear requirements and guarantees towards their transferability. In this work, we establish a theoretically grounded and practically useful framework for the transfer learning of GNNs. Firstly, we propose a novel view towards the essential graph information and advocate the capturing of it as the goal of transferable GNN training, which motivates the design of EGI (Ego-Graph Information maximization) to analytically achieve this goal. Secondly,when node features are structure-relevant, we conduct an analysis of EGI transferability regarding the difference between the local graph Laplacians of the source and target graphs. We conduct controlled synthetic experiments to directly justify our theoretical conclusions. Comprehensive experiments on two real-world network datasets show consistent results in the analyzed setting of direct-transfering, while those on large-scale knowledge graphs show promising results in the more practical setting of transfering with fine-tuning.
[ Virtual ]
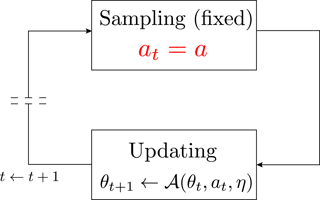
[ Virtual ]

Document intelligence automates the extraction of information from documents and supports many business applications. Recent self-supervised learning methods on large-scale unlabeled document datasets have opened up promising directions towards reducing annotation efforts by training models with self-supervised objectives. However, most of the existing document pretraining methods are still language-dominated. We present UDoc, a new unified pretraining framework for document understanding. UDoc is designed to support most document understanding tasks, extending the Transformer to take multimodal embeddings as input. Each input element is composed of words and visual features from a semantic region of the input document image. An important feature of UDoc is that it learns a generic representation by making use of three self-supervised losses, encouraging the representation to model sentences, learn similarities, and align modalities. Extensive empirical analysis demonstrates that the pretraining procedure learns better joint representations and leads to improvements in downstream tasks.
[ Virtual ]
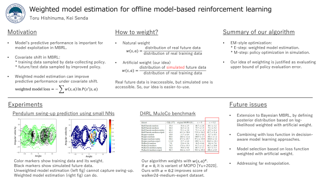
This paper discusses model estimation in offline model-based reinforcement learning (MBRL), which is important for subsequent policy improvement using an estimated model. From the viewpoint of covariate shift, a natural idea is model estimation weighted by the ratio of the state-action distributions of offline data and real future data. However, estimating such a natural weight is one of the main challenges for off-policy evaluation, which is not easy to use. As an artificial alternative, this paper considers weighting with the state-action distribution ratio of offline data and simulated future data, which can be estimated relatively easily by standard density ratio estimation techniques for supervised learning. Based on the artificial weight, this paper defines a loss function for offline MBRL and presents an algorithm to optimize it. Weighting with the artificial weight is justified as evaluating an upper bound of the policy evaluation error. Numerical experiments demonstrate the effectiveness of weighting with the artificial weight.
[ Virtual ]
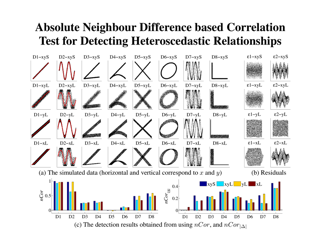
It is a challenge to detect complicated data relationships thoroughly. Here, we propose a new statistical measure, named the absolute neighbour difference based neighbour correlation coefficient, to detect the associations between variables through examining the heteroscedasticity of the unpredictable variation of dependent variables. Different from previous studies, the new method concentrates on measuring nonfunctional relationships rather than functional or mixed associations. Either used alone or in combination with other measures, it enables not only a convenient test of heteroscedasticity, but also measuring functional and nonfunctional relationships separately that obviously leads to a deeper insight into the data associations. The method is concise and easy to implement that does not rely on explicitly estimating the regression residuals or the dependencies between variables so that it is not restrict to any kind of model assumption. The mechanisms of the correlation test are proved in theory and demonstrated with numerical analyses.
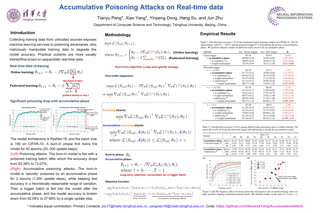
Collecting training data from untrusted sources exposes machine learning services to poisoning adversaries, who maliciously manipulate training data to degrade the model accuracy. When trained on offline datasets, poisoning adversaries have to inject the poisoned data in advance before training, and the order of feeding these poisoned batches into the model is stochastic. In contrast, practical systems are more usually trained/fine-tuned on sequentially captured real-time data, in which case poisoning adversaries could dynamically poison each data batch according to the current model state. In this paper, we focus on the real-time settings and propose a new attacking strategy, which affiliates an accumulative phase with poisoning attacks to secretly (i.e., without affecting accuracy) magnify the destructive effect of a (poisoned) trigger batch. By mimicking online learning and federated learning on MNIST and CIFAR-10, we show that model accuracy significantly drops by a single update step on the trigger batch after the accumulative phase. Our work validates that a well-designed but straightforward attacking strategy can dramatically amplify the poisoning effects, with no need to explore complex techniques.
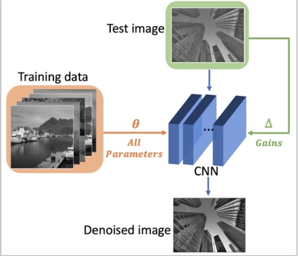
Deep convolutional neural networks (CNNs) for image denoising are typically trained on large datasets. These models achieve the current state of the art, but they do not generalize well to data that deviate from the training distribution. Recent work has shown that it is possible to train denoisers on a single noisy image. These models adapt to the features of the test image, but their performance is limited by the small amount of information used to train them. Here we propose "GainTuning'', a methodology by which CNN models pre-trained on large datasets can be adaptively and selectively adjusted for individual test images. To avoid overfitting, GainTuning optimizes a single multiplicative scaling parameter (the “Gain”) of each channel in the convolutional layers of the CNN. We show that GainTuning improves state-of-the-art CNNs on standard image-denoising benchmarks, boosting their denoising performance on nearly every image in a held-out test set. These adaptive improvements are even more substantial for test images differing systematically from the training data, either in noise level or image type. We illustrate the potential of adaptive GainTuning in a scientific application to transmission-electron-microscope images, using a CNN that is pre-trained on synthetic data. In contrast to the existing methodology, …
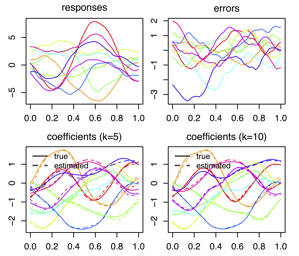
Feature Selection and Functional Data Analysis are two dynamic areas of research, with important applications in the analysis of large and complex data sets. Straddling these two areas, we propose a new highly efficient algorithm to perform Group Elastic Net with application to function-on-scalar feature selection, where a functional response is modeled against a very large number of potential scalar predictors. First, we introduce a new algorithm to solve Group Elastic Net in ultra-high dimensional settings, which exploits the sparsity structure of the Augmented Lagrangian to greatly reduce the computational burden. Next, taking advantage of the properties of Functional Principal Components, we extend our algorithm to the function-on-scalar regression framework. We use simulations to demonstrate the CPU time gains afforded by our approach compared to its best existing competitors, and present an application to data from a Genome-Wide Association Study on childhood obesity.
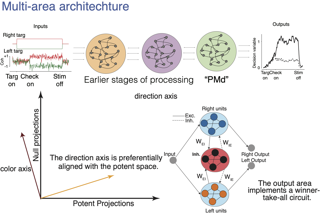
Recurrent neural networks (RNNs) trained on neuroscience-based tasks have been widely used as models for cortical areas performing analogous tasks. However, very few tasks involve a single cortical area, and instead require the coordination of multiple brain areas. Despite the importance of multi-area computation, there is a limited understanding of the principles underlying such computation. We propose to use multi-area RNNs with neuroscience-inspired architecture constraints to derive key features of multi-area computation. In particular, we show that incorporating multiple areas and Dale's Law is critical for biasing the networks to learn biologically plausible solutions. Additionally, we leverage the full observability of the RNNs to show that output-relevant information is preferentially propagated between areas. These results suggest that cortex uses modular computation to generate minimal sufficient representations of task information. More broadly, our results suggest that constrained multi-area RNNs can produce experimentally testable hypotheses for computations that occur within and across multiple brain areas, enabling new insights into distributed computation in neural systems.
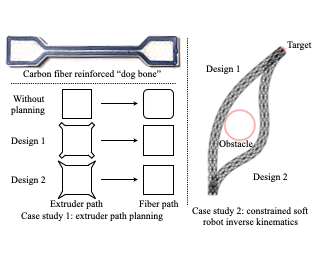
In design, fabrication, and control problems, we are often faced with the task of synthesis, in which we must generate an object or configuration that satisfies a set of constraints while maximizing one or more objective functions. The synthesis problem is typically characterized by a physical process in which many different realizations may achieve the goal. This many-to-one map presents challenges to the supervised learning of feed-forward synthesis, as the set of viable designs may have a complex structure. In addition, the non-differentiable nature of many physical simulations prevents efficient direct optimization. We address both of these problems with a two-stage neural network architecture that we may consider to be an autoencoder. We first learn the decoder: a differentiable surrogate that approximates the many-to-one physical realization process. We then learn the encoder, which maps from goal to design, while using the fixed decoder to evaluate the quality of the realization. We evaluate the approach on two case studies: extruder path planning in additive manufacturing and constrained soft robot inverse kinematics. We compare our approach to direct optimization of the design using the learned surrogate, and to supervised learning of the synthesis problem. We find that our approach produces higher quality …
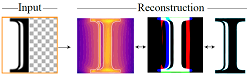
Fonts are ubiquitous across documents and come in a variety of styles. They are either represented in a native vector format or rasterized to produce fixed resolution images. In the first case, the non-standard representation prevents benefiting from latest network architectures for neural representations; while, in the latter case, the rasterized representation, when encoded via networks, results in loss of data fidelity, as font-specific discontinuities like edges and corners are difficult to represent using neural networks. Based on the observation that complex fonts can be represented by a superposition of a set of simpler occupancy functions, we introduce multi-implicits to represent fonts as a permutation-invariant set of learned implict functions, without losing features (e.g., edges and corners). However, while multi-implicits locally preserve font features, obtaining supervision in the form of ground truth multi-channel signals is a problem in itself. Instead, we propose how to train such a representation with only local supervision, while the proposed neural architecture directly finds globally consistent multi-implicits for font families. We extensively evaluate the proposed representation for various tasks including reconstruction, interpolation, and synthesis to demonstrate clear advantages with existing alternatives. Additionally, the representation naturally enables glyph completion, wherein a single characteristic font is used …
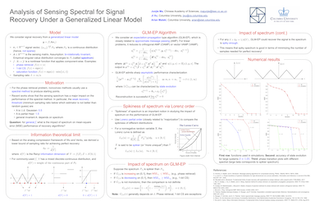
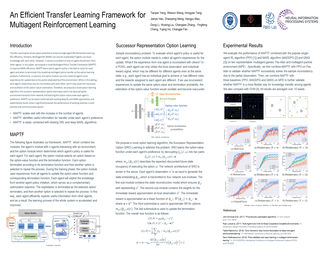
Transfer Learning has shown great potential to enhance single-agent Reinforcement Learning (RL) efficiency. Similarly, Multiagent RL (MARL) can also be accelerated if agents can share knowledge with each other. However, it remains a problem of how an agent should learn from other agents. In this paper, we propose a novel Multiagent Policy Transfer Framework (MAPTF) to improve MARL efficiency. MAPTF learns which agent's policy is the best to reuse for each agent and when to terminate it by modeling multiagent policy transfer as the option learning problem. Furthermore, in practice, the option module can only collect all agent's local experiences for update due to the partial observability of the environment. While in this setting, each agent's experience may be inconsistent with each other, which may cause the inaccuracy and oscillation of the option-value's estimation. Therefore, we propose a novel option learning algorithm, the successor representation option learning to solve it by decoupling the environment dynamics from rewards and learning the option-value under each agent's preference. MAPTF can be easily combined with existing deep RL and MARL approaches, and experimental results show it significantly boosts the performance of existing methods in both discrete and continuous state spaces.
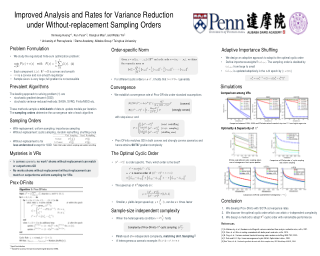
When applying a stochastic algorithm, one must choose an order to draw samples. The practical choices are without-replacement sampling orders, which are empirically faster and more cache-friendly than uniform-iid-sampling but often have inferior theoretical guarantees. Without-replacement sampling is well understood only for SGD without variance reduction. In this paper, we will improve the convergence analysis and rates of variance reduction under without-replacement sampling orders for composite finite-sum minimization.Our results are in two-folds. First, we develop a damped variant of Finito called Prox-DFinito and establish its convergence rates with random reshuffling, cyclic sampling, and shuffling-once, under both generally and strongly convex scenarios. These rates match full-batch gradient descent and are state-of-the-art compared to the existing results for without-replacement sampling with variance-reduction. Second, our analysis can gauge how the cyclic order will influence the rate of cyclic sampling and, thus, allows us to derive the optimal fixed ordering. In the highly data-heterogeneous scenario, Prox-DFinito with optimal cyclic sampling can attain a sample-size-independent convergence rate, which, to our knowledge, is the first result that can match with uniform-iid-sampling with variance reduction. We also propose a practical method to discover the optimal cyclic ordering numerically.
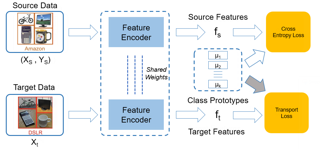
Existing methods for unsupervised domain adaptation often rely on minimizing some statistical distance between the source and target samples in the latent space. To avoid the sampling variability, class imbalance, and data-privacy concerns that often plague these methods, we instead provide a memory and computation-efficient probabilistic framework to extract class prototypes and align the target features with them. We demonstrate the general applicability of our method on a wide range of scenarios, including single-source, multi-source, class-imbalance, and source-private domain adaptation. Requiring no additional model parameters and having a moderate increase in computation over the source model alone, the proposed method achieves competitive performance with state-of-the-art methods.

We propose a general method to construct centroid approximation for the distribution of maximum points of a random function (a.k.a. argmax distribution), which finds broad applications in machine learning. Our method optimizes a set of centroid points to compactly approximate the argmax distribution with a simple objective function, without explicitly drawing exact samples from the argmax distribution. Theoretically, the argmax centroid method can be shown to minimize a surrogate of Wasserstein distance between the ground-truth argmax distribution and the centroid approximation under proper conditions. We demonstrate the applicability and effectiveness of our method on a variety of real-world multi-task learning applications, including few-shot image classification, personalized dialogue systems and multi-target domain adaptation.

For an image query, unsupervised contrastive learning labels crops of the same image as positives, and other image crops as negatives. Although intuitive, such a native label assignment strategy cannot reveal the underlying semantic similarity between a query and its positives and negatives, and impairs performance, since some negatives are semantically similar to the query or even share the same semantic class as the query. In this work, we first prove that for contrastive learning, inaccurate label assignment heavily impairs its generalization for semantic instance discrimination, while accurate labels benefit its generalization. Inspired by this theory, we propose a novel self-labeling refinement approach for contrastive learning. It improves the label quality via two complementary modules: (i) self-labeling refinery (SLR) to generate accurate labels and (ii) momentum mixup (MM) to enhance similarity between query and its positive. SLR uses a positive of a query to estimate semantic similarity between a query and its positive and negatives, and combines estimated similarity with vanilla label assignment in contrastive learning to iteratively generate more accurate and informative soft labels. We theoretically show that our SLR can exactly recover the true semantic labels of label-corrupted data, and supervises networks to achieve zero prediction error on …
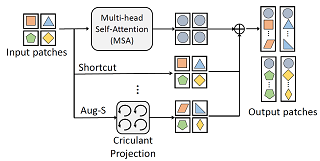
Transformer models have achieved great progress on computer vision tasks recently. The rapid development of vision transformers is mainly contributed by their high representation ability for extracting informative features from input images. However, the mainstream transformer models are designed with deep architectures, and the feature diversity will be continuously reduced as the depth increases, \ie, feature collapse. In this paper, we theoretically analyze the feature collapse phenomenon and study the relationship between shortcuts and feature diversity in these transformer models. Then, we present an augmented shortcut scheme, which inserts additional paths with learnable parameters in parallel on the original shortcuts. To save the computational costs, we further explore an efficient approach that uses the block-circulant projection to implement augmented shortcuts. Extensive experiments conducted on benchmark datasets demonstrate the effectiveness of the proposed method, which brings about 1% accuracy increase of the state-of-the-art visual transformers without obviously increasing their parameters and FLOPs.
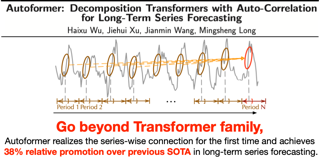
Extending the forecasting time is a critical demand for real applications, such as extreme weather early warning and long-term energy consumption planning. This paper studies the long-term forecasting problem of time series. Prior Transformer-based models adopt various self-attention mechanisms to discover the long-range dependencies. However, intricate temporal patterns of the long-term future prohibit the model from finding reliable dependencies. Also, Transformers have to adopt the sparse versions of point-wise self-attentions for long series efficiency, resulting in the information utilization bottleneck. Going beyond Transformers, we design Autoformer as a novel decomposition architecture with an Auto-Correlation mechanism. We break with the pre-processing convention of series decomposition and renovate it as a basic inner block of deep models. This design empowers Autoformer with progressive decomposition capacities for complex time series. Further, inspired by the stochastic process theory, we design the Auto-Correlation mechanism based on the series periodicity, which conducts the dependencies discovery and representation aggregation at the sub-series level. Auto-Correlation outperforms self-attention in both efficiency and accuracy. In long-term forecasting, Autoformer yields state-of-the-art accuracy, with a 38% relative improvement on six benchmarks, covering five practical applications: energy, traffic, economics, weather and disease. Code is available at this repository: https://github.com/thuml/Autoformer.

Many machine learning tasks have to make a trade-off between two loss functions, typically the main data-fitness loss and an auxiliary loss. The most widely used approach is to optimize the linear combination of the objectives, which, however, requires manual tuning of the combination coefficient and is theoretically unsuitable for non-convex functions. In this work, we consider constrained optimization as a more principled approach for trading off two losses, with a special emphasis on lexicographic optimization, a degenerated limit of constrained optimization which optimizes a secondary loss inside the optimal set of the main loss. We propose a dynamic barrier gradient descent algorithm which provides a unified solution of both constrained and lexicographic optimization. We establish the convergence of the method for general non-convex functions.
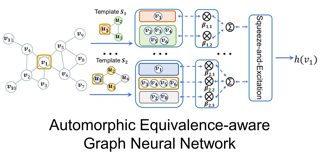
Distinguishing the automorphic equivalence of nodes in a graph plays an essential role in many scientific domains, e.g., computational biologist and social network analysis. However, existing graph neural networks (GNNs) fail to capture such an important property. To make GNN aware of automorphic equivalence, we first introduce a localized variant of this concept --- ego-centered automorphic equivalence (Ego-AE). Then, we design a novel variant of GNN, i.e., GRAPE, that uses learnable AE-aware aggregators to explicitly differentiate the Ego-AE of each node's neighbors with the aids of various subgraph templates. While the design of subgraph templates can be hard, we further propose a genetic algorithm to automatically search them from graph data. Moreover, we theoretically prove that GRAPE is expressive in terms of generating distinct representations for nodes with different Ego-AE features, which fills in a fundamental gap of existing GNN variants. Finally, we empirically validate our model on eight real-world graph data, including social network, e-commerce co-purchase network, and citation network, and show that it consistently outperforms existing GNNs. The source code is public available at https://github.com/tsinghua-fib-lab/GRAPE.
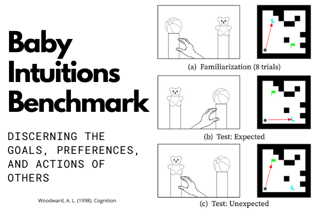
To achieve human-like common sense about everyday life, machine learning systems must understand and reason about the goals, preferences, and actions of other agents in the environment. By the end of their first year of life, human infants intuitively achieve such common sense, and these cognitive achievements lay the foundation for humans' rich and complex understanding of the mental states of others. Can machines achieve generalizable, commonsense reasoning about other agents like human infants? The Baby Intuitions Benchmark (BIB) challenges machines to predict the plausibility of an agent's behavior based on the underlying causes of its actions. Because BIB's content and paradigm are adopted from developmental cognitive science, BIB allows for direct comparison between human and machine performance. Nevertheless, recently proposed, deep-learning-based agency reasoning models fail to show infant-like reasoning, leaving BIB an open challenge.
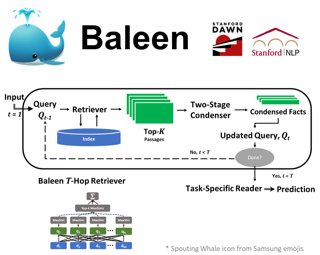
Multi-hop reasoning (i.e., reasoning across two or more documents) is a key ingredient for NLP models that leverage large corpora to exhibit broad knowledge. To retrieve evidence passages, multi-hop models must contend with a fast-growing search space across the hops, represent complex queries that combine multiple information needs, and resolve ambiguity about the best order in which to hop between training passages. We tackle these problems via Baleen, a system that improves the accuracy of multi-hop retrieval while learning robustly from weak training signals in the many-hop setting. To tame the search space, we propose condensed retrieval, a pipeline that summarizes the retrieved passages after each hop into a single compact context. To model complex queries, we introduce a focused late interaction retriever that allows different parts of the same query representation to match disparate relevant passages. Lastly, to infer the hopping dependencies among unordered training passages, we devise latent hop ordering, a weak-supervision strategy in which the trained retriever itself selects the sequence of hops. We evaluate Baleen on retrieval for two-hop question answering and many-hop claim verification, establishing state-of-the-art performance.

Despite Graph Neural Networks (GNNs) have achieved remarkable accuracy, whether the results are trustworthy is still unexplored. Previous studies suggest that many modern neural networks are over-confident on the predictions, however, surprisingly, we discover that GNNs are primarily in the opposite direction, i.e., GNNs are under-confident. Therefore, the confidence calibration for GNNs is highly desired. In this paper, we propose a novel trustworthy GNN model by designing a topology-aware post-hoc calibration function. Specifically, we first verify that the confidence distribution in a graph has homophily property, and this finding inspires us to design a calibration GNN model (CaGCN) to learn the calibration function. CaGCN is able to obtain a unique transformation from logits of GNNs to the calibrated confidence for each node, meanwhile, such transformation is able to preserve the order between classes, satisfying the accuracy-preserving property. Moreover, we apply the calibration GNN to self-training framework, showing that more trustworthy pseudo labels can be obtained with the calibrated confidence and further improve the performance. Extensive experiments demonstrate the effectiveness of our proposed model in terms of both calibration and accuracy.
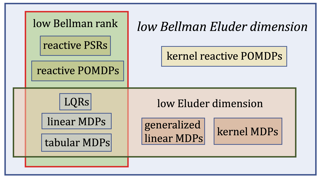
Finding the minimal structural assumptions that empower sample-efficient learning is one of the most important research directions in Reinforcement Learning (RL). This paper advances our understanding of this fundamental question by introducing a new complexity measure—Bellman Eluder (BE) dimension. We show that the family of RL problems of low BE dimension is remarkably rich, which subsumes a vast majority of existing tractable RL problems including but not limited to tabular MDPs, linear MDPs, reactive POMDPs, low Bellman rank problems as well as low Eluder dimension problems. This paper further designs a new optimization-based algorithm— GOLF, and reanalyzes a hypothesis elimination-based algorithm—OLIVE (proposed in Jiang et al. (2017)). We prove that both algorithms learn the near-optimal policies of low BE dimension problems in a number of samples that is polynomial in all relevant parameters, but independent of the size of state-action space. Our regret and sample complexity results match or improve the best existing results for several well-known subclasses of low BE dimension problems.
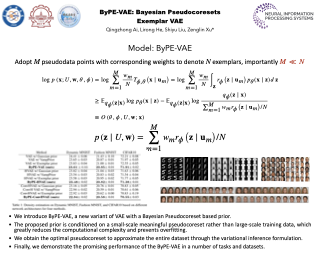
Recent studies show that advanced priors play a major role in deep generative models. Exemplar VAE, as a variant of VAE with an exemplar-based prior, has achieved impressive results. However, due to the nature of model design, an exemplar-based model usually requires vast amounts of data to participate in training, which leads to huge computational complexity. To address this issue, we propose Bayesian Pseudocoresets Exemplar VAE (ByPE-VAE), a new variant of VAE with a prior based on Bayesian pseudocoreset. The proposed prior is conditioned on a small-scale pseudocoreset rather than the whole dataset for reducing the computational cost and avoiding overfitting. Simultaneously, we obtain the optimal pseudocoreset via a stochastic optimization algorithm during VAE training aiming to minimize the Kullback-Leibler divergence between the prior based on the pseudocoreset and that based on the whole dataset. Experimental results show that ByPE-VAE can achieve competitive improvements over the state-of-the-art VAEs in the tasks of density estimation, representation learning, and generative data augmentation. Particularly, on a basic VAE architecture, ByPE-VAE is up to 3 times faster than Exemplar VAE while almost holding the performance. Code is available at \url{https://github.com/Aiqz/ByPE-VAE}.
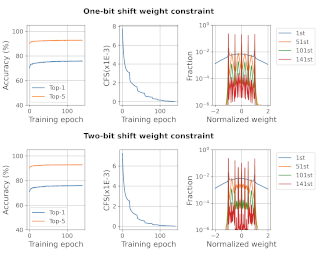
Backward propagation of errors (backpropagation) is a method to minimize objective functions (e.g., loss functions) of deep neural networks by identifying optimal sets of weights and biases. Imposing constraints on weight precision is often required to alleviate prohibitive workloads on hardware. Despite the remarkable success of backpropagation, the algorithm itself is not capable of considering such constraints unless additional algorithms are applied simultaneously. To address this issue, we propose the constrained backpropagation (CBP) algorithm based on the pseudo-Lagrange multiplier method to obtain the optimal set of weights that satisfy a given set of constraints. The defining characteristic of the proposed CBP algorithm is the utilization of a Lagrangian function (loss function plus constraint function) as its objective function. We considered various types of constraints — binary, ternary, one-bit shift, and two-bit shift weight constraints. As a post-training method, CBP applied to AlexNet, ResNet-18, ResNet-50, and GoogLeNet on ImageNet, which were pre-trained using the conventional backpropagation. For most cases, the proposed algorithm outperforms the state-of-the-art methods on ImageNet, e.g., 66.6\%, 74.4\%, and 64.0\% top-1 accuracy for ResNet-18, ResNet-50, and GoogLeNet with binary weights, respectively. This highlights CBP as a learning algorithm to address diverse constraints with the minimal performance loss by …
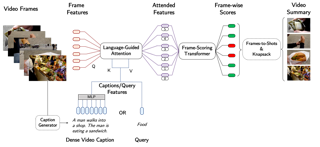
A generic video summary is an abridged version of a video that conveys the whole story and features the most important scenes. Yet the importance of scenes in a video is often subjective, and users should have the option of customizing the summary by using natural language to specify what is important to them. Further, existing models for fully automatic generic summarization have not exploited available language models, which can serve as an effective prior for saliency. This work introduces CLIP-It, a single framework for addressing both generic and query-focused video summarization, typically approached separately in the literature. We propose a language-guided multimodal transformer that learns to score frames in a video based on their importance relative to one another and their correlation with a user-defined query (for query-focused summarization) or an automatically generated dense video caption (for generic video summarization). Our model can be extended to the unsupervised setting by training without ground-truth supervision. We outperform baselines and prior work by a significant margin on both standard video summarization datasets (TVSum and SumMe) and a query-focused video summarization dataset (QFVS). Particularly, we achieve large improvements in the transfer setting, attesting to our method's strong generalization capabilities.
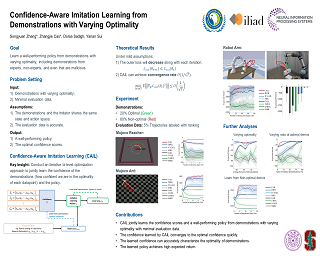
Most existing imitation learning approaches assume the demonstrations are drawn from experts who are optimal, but relaxing this assumption enables us to use a wider range of data. Standard imitation learning may learn a suboptimal policy from demonstrations with varying optimality. Prior works use confidence scores or rankings to capture beneficial information from demonstrations with varying optimality, but they suffer from many limitations, e.g., manually annotated confidence scores or high average optimality of demonstrations. In this paper, we propose a general framework to learn from demonstrations with varying optimality that jointly learns the confidence score and a well-performing policy. Our approach, Confidence-Aware Imitation Learning (CAIL) learns a well-performing policy from confidence-reweighted demonstrations, while using an outer loss to track the performance of our model and to learn the confidence. We provide theoretical guarantees on the convergence of CAIL and evaluate its performance in both simulated and real robot experiments.Our results show that CAIL significantly outperforms other imitation learning methods from demonstrations with varying optimality. We further show that even without access to any optimal demonstrations, CAIL can still learn a successful policy, and outperforms prior work.

Vision-and-Language Navigation (VLN) is a task where an agent navigates in an embodied indoor environment under human instructions. Previous works ignore the distribution of sample difficulty and we argue that this potentially degrade their agent performance. To tackle this issue, we propose a novel curriculum- based training paradigm for VLN tasks that can balance human prior knowledge and agent learning progress about training samples. We develop the principle of curriculum design and re-arrange the benchmark Room-to-Room (R2R) dataset to make it suitable for curriculum training. Experiments show that our method is model-agnostic and can significantly improve the performance, the generalizability, and the training efficiency of current state-of-the-art navigation agents without increasing model complexity.
Typically, inversion algorithms assume that a forward model, which relates a source to its resulting measurements, is known and fixed. Using collected indirect measurements and the forward model, the goal becomes to recover the source. When the forward model is unknown, or imperfect, artifacts due to model mismatch occur in the recovery of the source. In this paper, we study the problem of blind inversion: solving an inverse problem with unknown or imperfect knowledge of the forward model parameters. We propose DeepGEM, a variational Expectation-Maximization (EM) framework that can be used to solve for the unknown parameters of the forward model in an unsupervised manner. DeepGEM makes use of a normalizing flow generative network to efficiently capture complex posterior distributions, which leads to more accurate evaluation of the source's posterior distribution used in EM. We showcase the effectiveness of our DeepGEM approach by achieving strong performance on the challenging problem of blind seismic tomography, where we significantly outperform the standard method used in seismology. We also demonstrate the generality of DeepGEM by applying it to a simple case of blind deconvolution.
We consider off-policy evaluation (OPE) in continuous treatment settings, such as personalized dose-finding. In OPE, one aims to estimate the mean outcome under a new treatment decision rule using historical data generated by a different decision rule. Most existing works on OPE focus on discrete treatment settings. To handle continuous treatments, we develop a novel estimation method for OPE using deep jump learning. The key ingredient of our method lies in adaptively discretizing the treatment space using deep discretization, by leveraging deep learning and multi-scale change point detection. This allows us to apply existing OPE methods in discrete treatments to handle continuous treatments. Our method is further justified by theoretical results, simulations, and a real application to Warfarin Dosing.
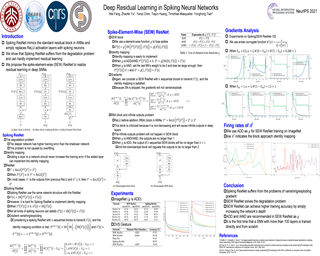
Deep Spiking Neural Networks (SNNs) present optimization difficulties for gradient-based approaches due to discrete binary activation and complex spatial-temporal dynamics. Considering the huge success of ResNet in deep learning, it would be natural to train deep SNNs with residual learning. Previous Spiking ResNet mimics the standard residual block in ANNs and simply replaces ReLU activation layers with spiking neurons, which suffers the degradation problem and can hardly implement residual learning. In this paper, we propose the spike-element-wise (SEW) ResNet to realize residual learning in deep SNNs. We prove that the SEW ResNet can easily implement identity mapping and overcome the vanishing/exploding gradient problems of Spiking ResNet. We evaluate our SEW ResNet on ImageNet, DVS Gesture, and CIFAR10-DVS datasets, and show that SEW ResNet outperforms the state-of-the-art directly trained SNNs in both accuracy and time-steps. Moreover, SEW ResNet can achieve higher performance by simply adding more layers, providing a simple method to train deep SNNs. To our best knowledge, this is the first time that directly training deep SNNs with more than 100 layers becomes possible. Our codes are available at https://github.com/fangwei123456/Spike-Element-Wise-ResNet.

Multi-agent control is a central theme in the Cyber-Physical Systems (CPS). However, current control methods either receive non-Markovian states due to insufficient sensing and decentralized design, or suffer from poor convergence. This paper presents the Delayed Propagation Transformer (DePT), a new transformer-based model that specializes in the global modeling of CPS while taking into account the immutable constraints from the physical world. DePT induces a cone-shaped spatial-temporal attention prior, which injects the information propagation and aggregation principles and enables a global view. With physical constraint inductive bias baked into its design, our DePT is ready to plug and play for a broad class of multi-agent systems. The experimental results on one of the most challenging CPS -- network-scale traffic signal control system in the open world -- show that our model outperformed the state-of-the-art expert methods on synthetic and real-world datasets. Our codes are released at: https://github.com/VITA-Group/DePT.
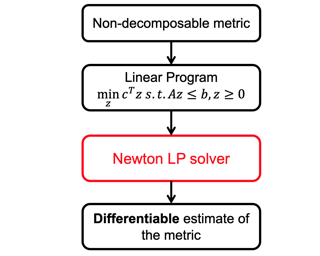
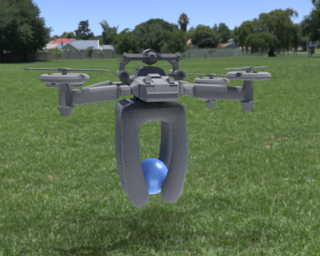
We present a method for differentiable simulation of soft articulated bodies. Our work enables the integration of differentiable physical dynamics into gradient-based pipelines. We develop a top-down matrix assembly algorithm within Projective Dynamics and derive a generalized dry friction model for soft continuum using a new matrix splitting strategy. We derive a differentiable control framework for soft articulated bodies driven by muscles, joint torques, or pneumatic tubes. The experiments demonstrate that our designs make soft body simulation more stable and realistic compared to other frameworks. Our method accelerates the solution of system identification problems by more than an order of magnitude, and enables efficient gradient-based learning of motion control with soft robots.
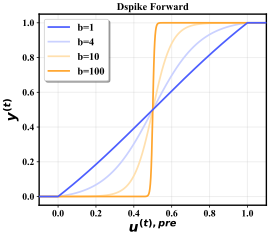
Spiking Neural Networks (SNNs) have emerged as a biology-inspired method mimicking the spiking nature of brain neurons. This bio-mimicry derives SNNs' energy efficiency of inference on neuromorphic hardware. However, it also causes an intrinsic disadvantage in training high-performing SNNs from scratch since the discrete spike prohibits the gradient calculation. To overcome this issue, the surrogate gradient (SG) approach has been proposed as a continuous relaxation. Yet the heuristic choice of SG leaves it vacant how the SG benefits the SNN training. In this work, we first theoretically study the gradient descent problem in SNN training and introduce finite difference gradient to quantitatively analyze the training behavior of SNN. Based on the introduced finite difference gradient, we propose a new family of Differentiable Spike (Dspike) functions that can adaptively evolve during training to find the optimal shape and smoothness for gradient estimation. Extensive experiments over several popular network structures show that training SNN with Dspike consistently outperforms the state-of-the-art training methods. For example, on the CIFAR10-DVS classification task, we can train a spiking ResNet-18 and achieve 75.4% top-1 accuracy with 10 time steps.
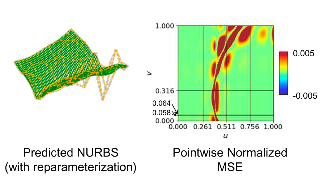
The paradigm of differentiable programming has significantly enhanced the scope of machine learning via the judicious use of gradient-based optimization. However, standard differentiable programming methods (such as autodiff) typically require that the machine learning models be differentiable, limiting their applicability. Our goal in this paper is to use a new, principled approach to extend gradient-based optimization to functions well modeled by splines, which encompass a large family of piecewise polynomial models. We derive the form of the (weak) Jacobian of such functions and show that it exhibits a block-sparse structure that can be computed implicitly and efficiently. Overall, we show that leveraging this redesigned Jacobian in the form of a differentiable "layer'' in predictive models leads to improved performance in diverse applications such as image segmentation, 3D point cloud reconstruction, and finite element analysis. We also open-source the code at \url{https://github.com/idealab-isu/DSA}.
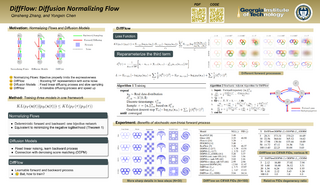
We present a novel generative modeling method called diffusion normalizing flow based on stochastic differential equations (SDEs). The algorithm consists of two neural SDEs: a forward SDE that gradually adds noise to the data to transform the data into Gaussian random noise, and a backward SDE that gradually removes the noise to sample from the data distribution. By jointly training the two neural SDEs to minimize a common cost function that quantifies the difference between the two, the backward SDE converges to a diffusion process the starts with a Gaussian distribution and ends with the desired data distribution. Our method is closely related to normalizing flow and diffusion probabilistic models, and can be viewed as a combination of the two. Compared with normalizing flow, diffusion normalizing flow is able to learn distributions with sharp boundaries. Compared with diffusion probabilistic models, diffusion normalizing flow requires fewer discretization steps and thus has better sampling efficiency. Our algorithm demonstrates competitive performance in both high-dimension data density estimation and image generation tasks.
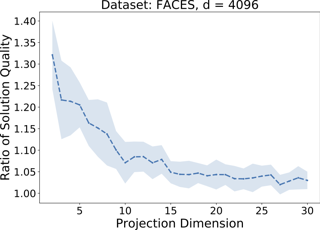
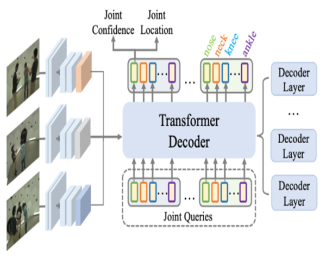
We present Multi-view Pose transformer (MvP) for estimating multi-person 3D poses from multi-view images. Instead of estimating 3D joint locations from costly volumetric representation or reconstructing the per-person 3D pose from multiple detected 2D poses as in previous methods, MvP directly regresses the multi-person 3D poses in a clean and efficient way, without relying on intermediate tasks. Specifically, MvP represents skeleton joints as learnable query embeddings and let them progressively attend to and reason over the multi-view information from the input images to directly regress the actual 3D joint locations. To improve the accuracy of such a simple pipeline, MvP presents a hierarchical scheme to concisely represent query embeddings of multi-person skeleton joints and introduces an input-dependent query adaptation approach. Further, MvP designs a novel geometrically guided attention mechanism, called projective attention, to more precisely fuse the cross-view information for each joint. MvP also introduces a RayConv operation to integrate the view-dependent camera geometry into the feature representations for augmenting the projective attention. We show experimentally that our MvP model outperforms the state-of-the-art methods on several benchmarks while being much more efficient. Notably, it achieves 92.3% AP25 on the challenging Panoptic dataset, improving upon the previous best approach [35] by …
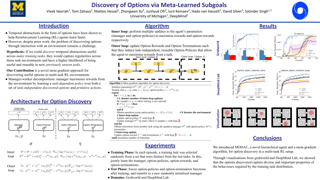
Temporal abstractions in the form of options have been shown to help reinforcement learning (RL) agents learn faster. However, despite prior work on this topic, the problem of discovering options through interaction with an environment remains a challenge. In this paper, we introduce a novel meta-gradient approach for discovering useful options in multi-task RL environments. Our approach is based on a manager-worker decomposition of the RL agent, in which a manager maximises rewards from the environment by learning a task-dependent policy over both a set of task-independent discovered-options and primitive actions. The option-reward and termination functions that define a subgoal for each option are parameterised as neural networks and trained via meta-gradients to maximise their usefulness. Empirical analysis on gridworld and DeepMind Lab tasks show that: (1) our approach can discover meaningful and diverse temporally-extended options in multi-task RL domains, (2) the discovered options are frequently used by the agent while learning to solve the training tasks, and (3) that the discovered options help a randomly initialised manager learn faster in completely new tasks.
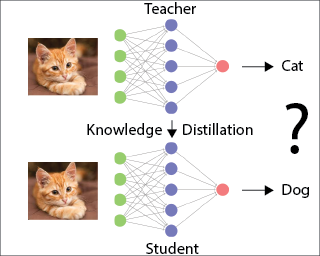
Knowledge distillation is a popular technique for training a small student network to emulate a larger teacher model, such as an ensemble of networks. We show that while knowledge distillation can improve student generalization, it does not typically work as it is commonly understood: there often remains a surprisingly large discrepancy between the predictive distributions of the teacher and the student, even in cases when the student has the capacity to perfectly match the teacher. We identify difficulties in optimization as a key reason for why the student is unable to match the teacher. We also show how the details of the dataset used for distillation play a role in how closely the student matches the teacher --- and that more closely matching the teacher paradoxically does not always lead to better student generalization.
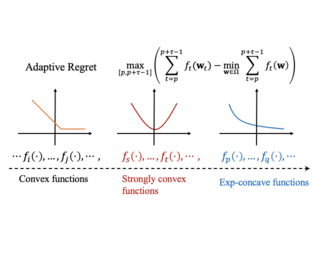
To deal with changing environments, a new performance measure—adaptive regret, defined as the maximum static regret over any interval, was proposed in online learning. Under the setting of online convex optimization, several algorithms have been successfully developed to minimize the adaptive regret. However, existing algorithms lack universality in the sense that they can only handle one type of convex functions and need apriori knowledge of parameters. By contrast, there exist universal algorithms, such as MetaGrad, that attain optimal static regret for multiple types of convex functions simultaneously. Along this line of research, this paper presents the first universal algorithm for minimizing the adaptive regret of convex functions. Specifically, we borrow the idea of maintaining multiple learning rates in MetaGrad to handle the uncertainty of functions, and utilize the technique of sleeping experts to capture changing environments. In this way, our algorithm automatically adapts to the property of functions (convex, exponentially concave, or strongly convex), as well as the nature of environments (stationary or changing). As a by product, it also allows the type of functions to switch between rounds.
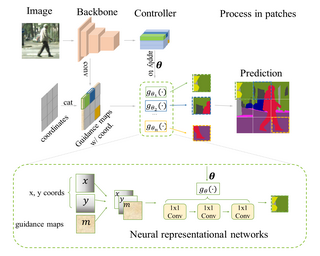
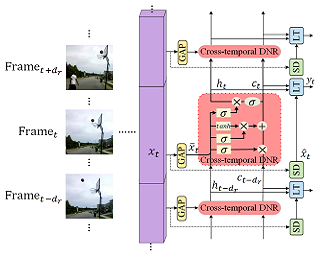
Convolutional Neural Networks (CNNs) have been the dominant model for video action recognition. Due to the huge memory and compute demand, popular action recognition networks need to be trained with small batch sizes, which makes learning discriminative spatial-temporal representations for videos become a challenging problem. In this paper, we present Dynamic Normalization and Relay (DNR), an improved normalization design, to augment the spatial-temporal representation learning of any deep action recognition model, adapting to small batch size training settings. We observe that state-of-the-art action recognition networks usually apply the same normalization parameters to all video data, and ignore the dependencies of the estimated normalization parameters between neighboring frames (at the same layer) and between neighboring layers (with all frames of a video clip). Inspired by this, DNR introduces two dynamic normalization relay modules to explore the potentials of cross-temporal and cross-layer feature distribution dependencies for estimating accurate layer-wise normalization parameters. These two DNR modules are instantiated as a light-weight recurrent structure conditioned on the current input features, and the normalization parameters estimated from the neighboring frames based features at the same layer or from the whole video clip based features at the preceding layers. We first plug DNR into prevailing 2D …
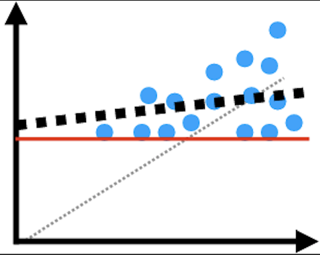
Graph neural networks (GNNs) are widely used for modelling graph-structured data in numerous applications. However, with their inherently finite aggregation layers, existing GNN models may not be able to effectively capture long-range dependencies in the underlying graphs. Motivated by this limitation, we propose a GNN model with infinite depth, which we call Efficient Infinite-Depth Graph Neural Networks (EIGNN), to efficiently capture very long-range dependencies. We theoretically derive a closed-form solution of EIGNN which makes training an infinite-depth GNN model tractable. We then further show that we can achieve more efficient computation for training EIGNN by using eigendecomposition. The empirical results of comprehensive experiments on synthetic and real-world datasets show that EIGNN has a better ability to capture long-range dependencies than recent baselines, and consistently achieves state-of-the-art performance. Furthermore, we show that our model is also more robust against both noise and adversarial perturbations on node features.
Building agents capable of understanding language instructions is critical to effective and robust human-AI collaboration. Recent work focuses on training these agents via reinforcement learning in environments with synthetic language; however, instructions often define long-horizon, sparse-reward tasks, and learning policies requires many episodes of experience. We introduce ELLA: Exploration through Learned Language Abstraction, a reward shaping approach geared towards boosting sample efficiency in sparse reward environments by correlating high-level instructions with simpler low-level constituents. ELLA has two key elements: 1) A termination classifier that identifies when agents complete low-level instructions, and 2) A relevance classifier that correlates low-level instructions with success on high-level tasks. We learn the termination classifier offline from pairs of instructions and terminal states. Notably, in departure from prior work in language and abstraction, we learn the relevance classifier online, without relying on an explicit decomposition of high-level instructions to low-level instructions. On a suite of complex BabyAI environments with varying instruction complexities and reward sparsity, ELLA shows gains in sample efficiency relative to language-based shaping and traditional RL methods.
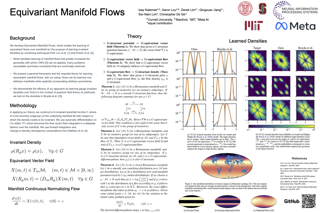
Tractably modelling distributions over manifolds has long been an important goal in the natural sciences. Recent work has focused on developing general machine learning models to learn such distributions. However, for many applications these distributions must respect manifold symmetries—a trait which most previous models disregard. In this paper, we lay the theoretical foundations for learning symmetry-invariant distributions on arbitrary manifolds via equivariant manifold flows. We demonstrate the utility of our approach by learning quantum field theory-motivated invariant SU(n) densities and by correcting meteor impact dataset bias.
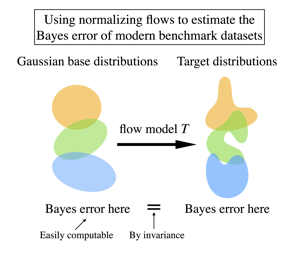
Evaluating the inherent difficulty of a given data-driven classification problem is important for establishing absolute benchmarks and evaluating progress in the field. To this end, a natural quantity to consider is the \emph{Bayes error}, which measures the optimal classification error theoretically achievable for a given data distribution. While generally an intractable quantity, we show that we can compute the exact Bayes error of generative models learned using normalizing flows. Our technique relies on a fundamental result, which states that the Bayes error is invariant under invertible transformation. Therefore, we can compute the exact Bayes error of the learned flow models by computing it for Gaussian base distributions, which can be done efficiently using Holmes-Diaconis-Ross integration. Moreover, we show that by varying the temperature of the learned flow models, we can generate synthetic datasets that closely resemble standard benchmark datasets, but with almost any desired Bayes error. We use our approach to conduct a thorough investigation of state-of-the-art classification models, and find that in some --- but not all --- cases, these models are capable of obtaining accuracy very near optimal. Finally, we use our method to evaluate the intrinsic "hardness" of standard benchmark datasets.

In this paper, we study the application of quasi-Newton methods for solving empirical risk minimization (ERM) problems defined over a large dataset. Traditional deterministic and stochastic quasi-Newton methods can be executed to solve such problems; however, it is known that their global convergence rate may not be better than first-order methods, and their local superlinear convergence only appears towards the end of the learning process. In this paper, we use an adaptive sample size scheme that exploits the superlinear convergence of quasi-Newton methods globally and throughout the entire learning process. The main idea of the proposed adaptive sample size algorithms is to start with a small subset of data points and solve their corresponding ERM problem within its statistical accuracy, and then enlarge the sample size geometrically and use the optimal solution of the problem corresponding to the smaller set as an initial point for solving the subsequent ERM problem with more samples. We show that if the initial sample size is sufficiently large and we use quasi-Newton methods to solve each subproblem, the subproblems can be solved superlinearly fast (after at most three iterations), as we guarantee that the iterates always stay within a neighborhood that quasi-Newton methods converge …
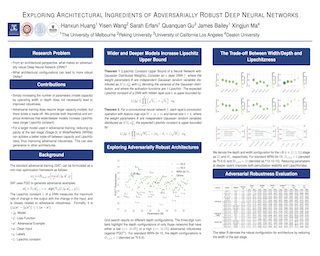
Deep neural networks (DNNs) are known to be vulnerable to adversarial attacks. A range of defense methods have been proposed to train adversarially robust DNNs, among which adversarial training has demonstrated promising results. However, despite preliminary understandings developed for adversarial training, it is still not clear, from the architectural perspective, what configurations can lead to more robust DNNs. In this paper, we address this gap via a comprehensive investigation on the impact of network width and depth on the robustness of adversarially trained DNNs. Specifically, we make the following key observations: 1) more parameters (higher model capacity) does not necessarily help adversarial robustness; 2) reducing capacity at the last stage (the last group of blocks) of the network can actually improve adversarial robustness; and 3) under the same parameter budget, there exists an optimal architectural configuration for adversarial robustness. We also provide a theoretical analysis explaning why such network configuration can help robustness. These architectural insights can help design adversarially robust DNNs.
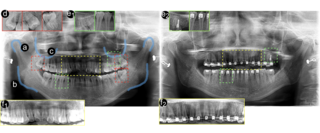
Dental forensic identification targets to identify persons with dental traces.The task is vital for the investigation of criminal scenes and mass disasters because of the resistance of dental structures and the wide-existence of dental imaging. However, no widely accepted automated solution is available for this labour-costly task. In this work, we pioneer to study deep learning for dental forensic identification based on panoramic radiographs. We construct a comprehensive benchmark with various dental variations that can adequately reflect the difficulties of the task. By considering the task's unique challenges, we propose FoID, a deep learning method featured by: (\textit{i}) clinical-inspired attention localization, (\textit{ii}) domain-specific augmentations that enable instance discriminative learning, and (\textit{iii}) transformer-based self-attention mechanism that dynamically reasons the relative importance of attentions. We show that FoID can outperform traditional approaches by at least \textbf{22.98\%} in terms of Rank-1 accuracy, and outperform strong CNN baselines by at least \textbf{10.50\%} in terms of mean Average Precision (mAP). Moreover, extensive ablation studies verify the effectiveness of each building blocks of FoID. Our work can be a first step towards the automated system for forensic identification among large-scale multi-site databases. Also, the proposed techniques, \textit{e.g.}, self-attention mechanism, can also be meaningful for other identification …
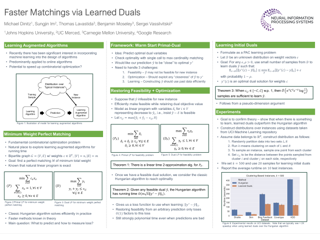
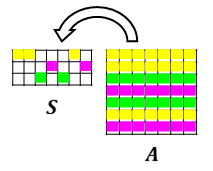
Recently, data-driven and learning-based algorithms for low rank matrix approximation were shown to outperform classical data-oblivious algorithms by wide margins in terms of accuracy. Those algorithms are based on the optimization of sparse sketching matrices, which lead to large savings in time and memory during testing. However, they require long training times on a large amount of existing data, and rely on access to specialized hardware and software. In this work, we develop new data-driven low rank approximation algorithms with better computational efficiency in the training phase, alleviating these drawbacks. Furthermore, our methods are interpretable: while previous algorithms choose the sketching matrix either at random or by black-box learning, we show that it can be set (or initialized) to clearly interpretable values extracted from the dataset. Our experiments show that our algorithms, either by themselves or in combination with previous methods, achieve significant empirical advantage over previous work, improving training times by up to an order of magnitude toward achieving the same target accuracy.
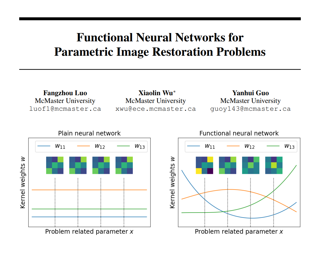
Almost every single image restoration problem has a closely related parameter, such as the scale factor in super-resolution, the noise level in image denoising, and the quality factor in JPEG deblocking. Although recent studies on image restoration problems have achieved great success due to the development of deep neural networks, they handle the parameter involved in an unsophisticated way. Most previous researchers either treat problems with different parameter levels as independent tasks, and train a specific model for each parameter level; or simply ignore the parameter, and train a single model for all parameter levels. The two popular approaches have their own shortcomings. The former is inefficient in computing and the latter is ineffective in performance. In this work, we propose a novel system called functional neural network (FuncNet) to solve a parametric image restoration problem with a single model. Unlike a plain neural network, the smallest conceptual element of our FuncNet is no longer a floating-point variable, but a function of the parameter of the problem. This feature makes it both efficient and effective for a parametric problem. We apply FuncNet to super-resolution, image denoising, and JPEG deblocking. The experimental results show the superiority of our FuncNet on all …
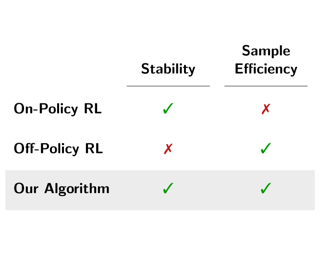
In real-world decision making tasks, it is critical for data-driven reinforcement learning methods to be both stable and sample efficient. On-policy methods typically generate reliable policy improvement throughout training, while off-policy methods make more efficient use of data through sample reuse. In this work, we combine the theoretically supported stability benefits of on-policy algorithms with the sample efficiency of off-policy algorithms. We develop policy improvement guarantees that are suitable for the off-policy setting, and connect these bounds to the clipping mechanism used in Proximal Policy Optimization. This motivates an off-policy version of the popular algorithm that we call Generalized Proximal Policy Optimization with Sample Reuse. We demonstrate both theoretically and empirically that our algorithm delivers improved performance by effectively balancing the competing goals of stability and sample efficiency.
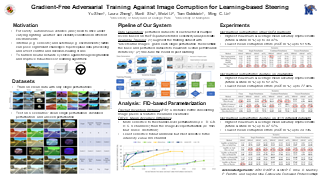
We introduce a simple yet effective framework for improving the robustness of learning algorithms against image corruptions for autonomous driving. These corruptions can occur due to both internal (e.g., sensor noises and hardware abnormalities) and external factors (e.g., lighting, weather, visibility, and other environmental effects). Using sensitivity analysis with FID-based parameterization, we propose a novel algorithm exploiting basis perturbations to improve the overall performance of autonomous steering and other image processing tasks, such as classification and detection, for self-driving cars. Our model not only improves the performance on the original dataset, but also achieves significant performance improvement on datasets with multiple and unseen perturbations, up to 87% and 77%, respectively. A comparison between our approach and other SOTA techniques confirms the effectiveness of our technique in improving the robustness of neural network training for learning-based steering and other image processing tasks.
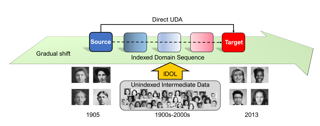
The effectiveness of unsupervised domain adaptation degrades when there is a large discrepancy between the source and target domains. Gradual domain adaption (GDA) is one promising way to mitigate such an issue, by leveraging additional unlabeled data that gradually shift from the source to the target. Through sequentially adapting the model along the "indexed" intermediate domains, GDA substantially improves the overall adaptation performance. In practice, however, the extra unlabeled data may not be separated into intermediate domains and indexed properly, limiting the applicability of GDA. In this paper, we investigate how to discover the sequence of intermediate domains when it is not already available. Concretely, we propose a coarse-to-fine framework, which starts with a coarse domain discovery step via progressive domain discriminator training. This coarse domain sequence then undergoes a fine indexing step via a novel cycle-consistency loss, which encourages the next intermediate domain to preserve sufficient discriminative knowledge of the current intermediate domain. The resulting domain sequence can then be used by a GDA algorithm. On benchmark data sets of GDA, we show that our approach, which we name Intermediate DOmain Labeler (IDOL), can lead to comparable or even better adaptation performance compared to the pre-defined domain sequence, making …
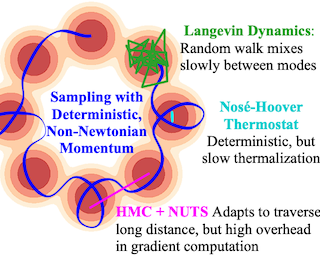
Sampling from an unnormalized probability distribution is a fundamental problem in machine learning with applications including Bayesian modeling, latent factor inference, and energy-based model training. After decades of research, variations of MCMC remain the default approach to sampling despite slow convergence. Auxiliary neural models can learn to speed up MCMC, but the overhead for training the extra model can be prohibitive. We propose a fundamentally different approach to this problem via a new Hamiltonian dynamics with a non-Newtonian momentum. In contrast to MCMC approaches like Hamiltonian Monte Carlo, no stochastic step is required. Instead, the proposed deterministic dynamics in an extended state space exactly sample the target distribution, specified by an energy function, under an assumption of ergodicity. Alternatively, the dynamics can be interpreted as a normalizing flow that samples a specified energy model without training. The proposed Energy Sampling Hamiltonian (ESH) dynamics have a simple form that can be solved with existing ODE solvers, but we derive a specialized solver that exhibits much better performance. ESH dynamics converge faster than their MCMC competitors enabling faster, more stable training of neural network energy models.
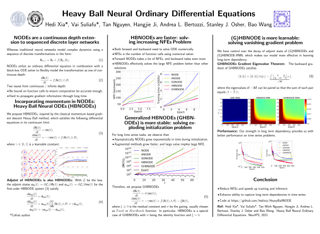
We propose heavy ball neural ordinary differential equations (HBNODEs), leveraging the continuous limit of the classical momentum accelerated gradient descent, to improve neural ODEs (NODEs) training and inference. HBNODEs have two properties that imply practical advantages over NODEs: (i) The adjoint state of an HBNODE also satisfies an HBNODE, accelerating both forward and backward ODE solvers, thus significantly reducing the number of function evaluations (NFEs) and improving the utility of the trained models. (ii) The spectrum of HBNODEs is well structured, enabling effective learning of long-term dependencies from complex sequential data. We verify the advantages of HBNODEs over NODEs on benchmark tasks, including image classification, learning complex dynamics, and sequential modeling. Our method requires remarkably fewer forward and backward NFEs, is more accurate, and learns long-term dependencies more effectively than the other ODE-based neural network models. Code is available at \url{https://github.com/hedixia/HeavyBallNODE}.
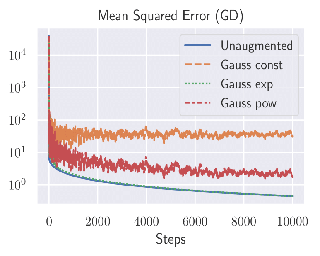
Though data augmentation has rapidly emerged as a key tool for optimization in modern machine learning, a clear picture of how augmentation schedules affect optimization and interact with optimization hyperparameters such as learning rate is nascent. In the spirit of classical convex optimization and recent work on implicit bias, the present work analyzes the effect of augmentation on optimization in the simple convex setting of linear regression with MSE loss.We find joint schedules for learning rate and data augmentation scheme under which augmented gradient descent provably converges and characterize the resulting minimum. Our results apply to arbitrary augmentation schemes, revealing complex interactions between learning rates and augmentations even in the convex setting. Our approach interprets augmented (S)GD as a stochastic optimization method for a time-varying sequence of proxy losses. This gives a unified way to analyze learning rate, batch size, and augmentations ranging from additive noise to random projections. From this perspective, our results, which also give rates of convergence, can be viewed as Monro-Robbins type conditions for augmented (S)GD.
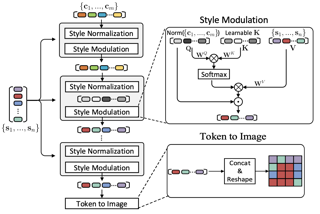
We present a new perspective of achieving image synthesis by viewing this task as a visual token generation problem. Different from existing paradigms that directly synthesize a full image from a single input (e.g., a latent code), the new formulation enables a flexible local manipulation for different image regions, which makes it possible to learn content-aware and fine-grained style control for image synthesis. Specifically, it takes as input a sequence of latent tokens to predict the visual tokens for synthesizing an image. Under this perspective, we propose a token-based generator (i.e., TokenGAN). Particularly, the TokenGAN inputs two semantically different visual tokens, i.e., the learned constant content tokens and the style tokens from the latent space. Given a sequence of style tokens, the TokenGAN is able to control the image synthesis by assigning the styles to the content tokens by attention mechanism with a Transformer. We conduct extensive experiments and show that the proposed TokenGAN has achieved state-of-the-art results on several widely-used image synthesis benchmarks, including FFHQ and LSUN CHURCH with different resolutions. In particular, the generator is able to synthesize high-fidelity images with (1024x1024) size, dispensing with convolutions entirely.
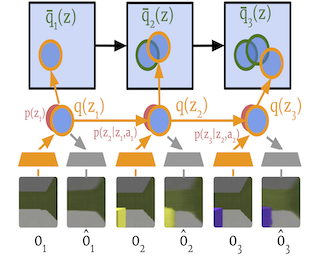
Humans and animals explore their environment and acquire useful skills even in the absence of clear goals, exhibiting intrinsic motivation. The study of intrinsic motivation in artificial agents is concerned with the following question: what is a good general-purpose objective for an agent? We study this question in dynamic partially-observed environments, and argue that a compact and general learning objective is to minimize the entropy of the agent's state visitation estimated using a latent state-space model. This objective induces an agent to both gather information about its environment, corresponding to reducing uncertainty, and to gain control over its environment, corresponding to reducing the unpredictability of future world states. We instantiate this approach as a deep reinforcement learning agent equipped with a deep variational Bayes filter. We find that our agent learns to discover, represent, and exercise control of dynamic objects in a variety of partially-observed environments sensed with visual observations without extrinsic reward.
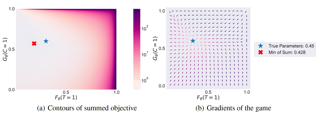
Deep models trained through maximum likelihood have achieved state-of-the-art results for survival analysis. Despite this training scheme, practitioners evaluate models under other criteria, such as binary classification losses at a chosen set of time horizons, e.g. Brier score (BS) and Bernoulli log likelihood (BLL). Models trained with maximum likelihood may have poor BS or BLL since maximum likelihood does not directly optimize these criteria. Directly optimizing criteria like BS requires inverse-weighting by the censoring distribution. However, estimating the censoring model under these metrics requires inverse-weighting by the failure distribution. The objective for each model requires the other, but neither are known. To resolve this dilemma, we introduce Inverse-Weighted Survival Games. In these games, objectives for each model are built from re-weighted estimates featuring the other model, where the latter is held fixed during training. When the loss is proper, we show that the games always have the true failure and censoring distributions as a stationary point. This means models in the game do not leave the correct distributions once reached. We construct one case where this stationary point is unique. We show that these games optimize BS on simulations and then apply these principles on real world cancer and critically-ill …
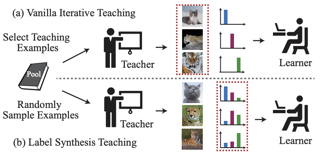
In this paper, we consider the problem of iterative machine teaching, where a teacher provides examples sequentially based on the current iterative learner. In contrast to previous methods that have to scan over the entire pool and select teaching examples from it in each iteration, we propose a label synthesis teaching framework where the teacher randomly selects input teaching examples (e.g., images) and then synthesizes suitable outputs (e.g., labels) for them. We show that this framework can avoid costly example selection while still provably achieving exponential teachability. We propose multiple novel teaching algorithms in this framework. Finally, we empirically demonstrate the value of our framework.
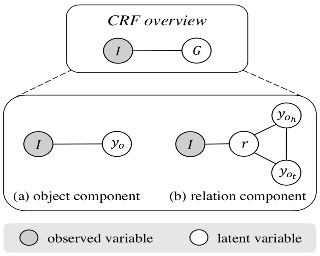
An in-depth scene understanding usually requires recognizing all the objects and their relations in an image, encoded as a scene graph. Most existing approaches for scene graph generation first independently recognize each object and then predict their relations independently. Though these approaches are very efficient, they ignore the dependency between different objects as well as between their relations. In this paper, we propose a principled approach to jointly predict the entire scene graph by fully capturing the dependency between different objects and between their relations. Specifically, we establish a unified conditional random field (CRF) to model the joint distribution of all the objects and their relations in a scene graph. We carefully design the potential functions to enable relational reasoning among different objects according to knowledge graph embedding methods. We further propose an efficient and effective algorithm for inference based on mean-field variational inference, in which we first provide a warm initialization by independently predicting the objects and their relations according to the current model, followed by a few iterations of relational reasoning. Experimental results on both the relationship retrieval and zero-shot relationship retrieval tasks prove the efficiency and efficacy of our proposed approach.
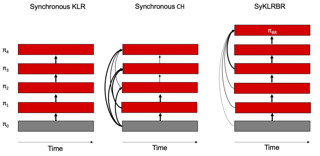
The standard problem setting in cooperative multi-agent settings is \emph{self-play} (SP), where the goal is to train a \emph{team} of agents that works well together. However, optimal SP policies commonly contain arbitrary conventions (``handshakes'') and are not compatible with other, independently trained agents or humans. This latter desiderata was recently formalized by \cite{Hu2020-OtherPlay} as the \emph{zero-shot coordination} (ZSC) setting and partially addressed with their \emph{Other-Play} (OP) algorithm, which showed improved ZSC and human-AI performance in the card game Hanabi. OP assumes access to the symmetries of the environment and prevents agents from breaking these in a mutually \emph{incompatible} way during training. However, as the authors point out, discovering symmetries for a given environment is a computationally hard problem. Instead, we show that through a simple adaption of k-level reasoning (KLR) \cite{Costa-Gomes2006-K-level}, synchronously training all levels, we can obtain competitive ZSC and ad-hoc teamplay performance in Hanabi, including when paired with a human-like proxy bot. We also introduce a new method, synchronous-k-level reasoning with a best response (SyKLRBR), which further improves performance on our synchronous KLR by co-training a best response.
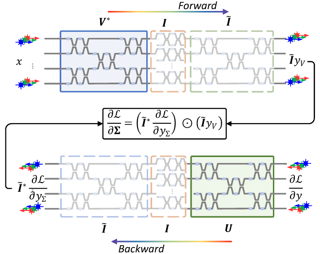
Silicon-photonics-based optical neural network (ONN) is a promising hardware platform that could represent a paradigm shift in efficient AI with its CMOS-compatibility, flexibility, ultra-low execution latency, and high energy efficiency. In-situ training on the online programmable photonic chips is appealing but still encounters challenging issues in on-chip implementability, scalability, and efficiency. In this work, we propose a closed-loop ONN on-chip learning framework L2ight to enable scalable ONN mapping and efficient in-situ learning. L2ight adopts a three-stage learning flow that first calibrates the complicated photonic circuit states under challenging physical constraints, then performs photonic core mapping via combined analytical solving and zeroth-order optimization. A subspace learning procedure with multi-level sparsity is integrated into L2ight to enable in-situ gradient evaluation and fast adaptation, unleashing the power of optics for real on-chip intelligence. Extensive experiments demonstrate our proposed L2ight outperforms prior ONN training protocols with 3-order-of-magnitude higher scalability and over 30x better efficiency, when benchmarked on various models and learning tasks. This synergistic framework is the first scalable on-chip learning solution that pushes this emerging field from intractable to scalable and further to efficient for next-generation self-learnable photonic neural chips. From a co-design perspective, L2ight also provides essential insights for hardware-restricted unitary subspace …
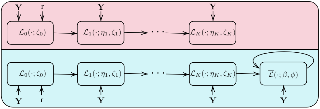
Robust principal component analysis (RPCA) is a critical tool in modern machine learning, which detects outliers in the task of low-rank matrix reconstruction. In this paper, we propose a scalable and learnable non-convex approach for high-dimensional RPCA problems, which we call Learned Robust PCA (LRPCA). LRPCA is highly efficient, and its free parameters can be effectively learned to optimize via deep unfolding. Moreover, we extend deep unfolding from finite iterations to infinite iterations via a novel feedforward-recurrent-mixed neural network model. We establish the recovery guarantee of LRPCA under mild assumptions for RPCA. Numerical experiments show that LRPCA outperforms the state-of-the-art RPCA algorithms, such as ScaledGD and AltProj, on both synthetic datasets and real-world applications.
Simple recurrent neural networks (RNNs) and their more advanced cousins LSTMs etc. have been very successful in sequence modeling. Their theoretical understanding, however, is lacking and has not kept pace with the progress for feedforward networks, where a reasonably complete understanding in the special case of highly overparametrized one-hidden-layer networks has emerged. In this paper, we make progress towards remedying this situation by proving that RNNs can learn functions of sequences. In contrast to the previous work that could only deal with functions of sequences that are sums of functions of individual tokens in the sequence, we allow general functions. Conceptually and technically, we introduce new ideas which enable us to extract information from the hidden state of the RNN in our proofs---addressing a crucial weakness in previous work. We illustrate our results on some regular language recognition problems.
A central goal in deep learning is to learn compact representations of features at every layer of a neural network, which is useful for both unsupervised representation learning and structured network pruning. While there is a growing body of work in structured pruning, current state-of-the-art methods suffer from two key limitations: (i) instability during training, and (ii) need for an additional step of fine-tuning, which is resource-intensive. At the core of these limitations is the lack of a systematic approach that jointly prunes and refines weights during training in a single stage, and does not require any fine-tuning upon convergence to achieve state-of-the-art performance. We present a novel single-stage structured pruning method termed DiscriminAtive Masking (DAM). The key intuition behind DAM is to discriminatively prefer some of the neurons to be refined during the training process, while gradually masking out other neurons. We show that our proposed DAM approach has remarkably good performance over a diverse range of applications in representation learning and structured pruning, including dimensionality reduction, recommendation system, graph representation learning, and structured pruning for image classification. We also theoretically show that the learning objective of DAM is directly related to minimizing the L_0 norm of the masking …
Binary neural networks (BNNs) represent original full-precision weights and activations into 1-bit with sign function. Since the gradient of the conventional sign function is almost zero everywhere which cannot be used for back-propagation, several attempts have been proposed to alleviate the optimization difficulty by using approximate gradient. However, those approximations corrupt the main direction of factual gradient. To this end, we propose to estimate the gradient of sign function in the Fourier frequency domain using the combination of sine functions for training BNNs, namely frequency domain approximation (FDA). The proposed approach does not affect the low-frequency information of the original sign function which occupies most of the overall energy, and high-frequency coefficients will be ignored to avoid the huge computational overhead. In addition, we embed a noise adaptation module into the training phase to compensate the approximation error. The experiments on several benchmark datasets and neural architectures illustrate that the binary network learned using our method achieves the state-of-the-art accuracy. Code will be available at https://gitee.com/mindspore/models/tree/master/research/cv/FDA-BNN.
We propose a deep reinforcement learning (RL) method to learn large neighborhood search (LNS) policy for integer programming (IP). The RL policy is trained as the destroy operator to select a subset of variables at each step, which is reoptimized by an IP solver as the repair operator. However, the combinatorial number of variable subsets prevents direct application of typical RL algorithms. To tackle this challenge, we represent all subsets by factorizing them into binary decisions on each variable. We then design a neural network to learn policies for each variable in parallel, trained by a customized actor-critic algorithm. We evaluate the proposed method on four representative IP problems. Results show that it can find better solutions than SCIP in much less time, and significantly outperform other LNS baselines with the same runtime. Moreover, these advantages notably persist when the policies generalize to larger problems. Further experiments with Gurobi also reveal that our method can outperform this state-of-the-art commercial solver within the same time limit.
Path planning, the problem of efficiently discovering high-reward trajectories, often requires optimizing a high-dimensional and multimodal reward function. Popular approaches like CEM and CMA-ES greedily focus on promising regions of the search space and may get trapped in local maxima. DOO and VOOT balance exploration and exploitation, but use space partitioning strategies independent of the reward function to be optimized. Recently, LaMCTS empirically learns to partition the search space in a reward-sensitive manner for black-box optimization. In this paper, we develop a novel formal regret analysis for when and why such an adaptive region partitioning scheme works. We also propose a new path planning method LaP3 which improves the function value estimation within each sub-region, and uses a latent representation of the search space. Empirically, LaP3 outperforms existing path planning methods in 2D navigation tasks, especially in the presence of difficult-to-escape local optima, and shows benefits when plugged into the planning components of model-based RL such as PETS. These gains transfer to highly multimodal real-world tasks, where we outperform strong baselines in compiler phase ordering by up to 39% on average across 9 tasks, and in molecular design by up to 0.4 on properties on a 0-1 scale. Code is …
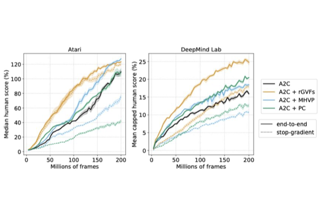
Our main contribution in this work is an empirical finding that random General Value Functions (GVFs), i.e., deep action-conditional predictions---random both in what feature of observations they predict as well as in the sequence of actions the predictions are conditioned upon---form good auxiliary tasks for reinforcement learning (RL) problems. In particular, we show that random deep action-conditional predictions when used as auxiliary tasks yield state representations that produce control performance competitive with state-of-the-art hand-crafted auxiliary tasks like value prediction, pixel control, and CURL in both Atari and DeepMind Lab tasks. In another set of experiments we stop the gradients from the RL part of the network to the state representation learning part of the network and show, perhaps surprisingly, that the auxiliary tasks alone are sufficient to learn state representations good enough to outperform an end-to-end trained actor-critic baseline. We opensourced our code at https://github.com/Hwhitetooth/random_gvfs.
Voting systems have a wide range of applications including recommender systems, web search, product design and elections. Limited by the lack of general-purpose analytical tools, it is difficult to hand-engineer desirable voting rules for each use case. For this reason, it is appealing to automatically discover voting rules geared towards each scenario. In this paper, we show that set-input neural network architectures such as Set Transformers, fully-connected graph networks and DeepSets are both theoretically and empirically well-suited for learning voting rules. In particular, we show that these network models can not only mimic a number of existing voting rules to compelling accuracy --- both position-based (such as Plurality and Borda) and comparison-based (such as Kemeny, Copeland and Maximin) --- but also discover near-optimal voting rules that maximize different social welfare functions. Furthermore, the learned voting rules generalize well to different voter utility distributions and election sizes unseen during training.
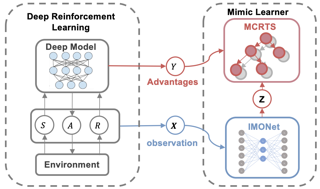
Interpreting Deep Reinforcement Learning (DRL) models is important to enhance trust and comply with transparency regulations. Existing methods typically explain a DRL model by visualizing the importance of low-level input features with super-pixels, attentions, or saliency maps. Our approach provides an interpretation based on high-level latent object features derived from a disentangled representation. We propose a Represent And Mimic (RAMi) framework for training 1) an identifiable latent representation to capture the independent factors of variation for the objects and 2) a mimic tree that extracts the causal impact of the latent features on DRL action values. To jointly optimize both the fidelity and the simplicity of a mimic tree, we derive a novel Minimum Description Length (MDL) objective based on the Information Bottleneck (IB) principle. Based on this objective, we describe a Monte Carlo Regression Tree Search (MCRTS) algorithm that explores different splits to find the IB-optimal mimic tree. Experiments show that our mimic tree achieves strong approximation performance with significantly fewer nodes than baseline models. We demonstrate the interpretability of our mimic tree by showing latent traversals, decision rules, causal impacts, and human evaluation results.
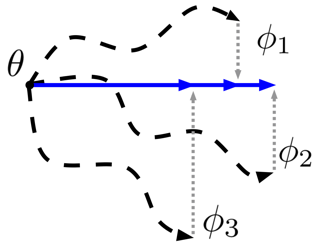
Finding neural network weights that generalize well from small datasets is difficult. A promising approach is to learn a weight initialization such that a small number of weight changes results in low generalization error. We show that this form of meta-learning can be improved by letting the learning algorithm decide which weights to change, i.e., by learning where to learn. We find that patterned sparsity emerges from this process, with the pattern of sparsity varying on a problem-by-problem basis. This selective sparsity results in better generalization and less interference in a range of few-shot and continual learning problems. Moreover, we find that sparse learning also emerges in a more expressive model where learning rates are meta-learned. Our results shed light on an ongoing debate on whether meta-learning can discover adaptable features and suggest that learning by sparse gradient descent is a powerful inductive bias for meta-learning systems.
Cross-modal matching, which aims to establish the correspondence between two different modalities, is fundamental to a variety of tasks such as cross-modal retrieval and vision-and-language understanding. Although a huge number of cross-modal matching methods have been proposed and achieved remarkable progress in recent years, almost all of these methods implicitly assume that the multimodal training data are correctly aligned. In practice, however, such an assumption is extremely expensive even impossible to satisfy. Based on this observation, we reveal and study a latent and challenging direction in cross-modal matching, named noisy correspondence, which could be regarded as a new paradigm of noisy labels. Different from the traditional noisy labels which mainly refer to the errors in category labels, our noisy correspondence refers to the mismatch paired samples. To solve this new problem, we propose a novel method for learning with noisy correspondence, named Noisy Correspondence Rectifier (NCR). In brief, NCR divides the data into clean and noisy partitions based on the memorization effect of neural networks and then rectifies the correspondence via an adaptive prediction model in a co-teaching manner. To verify the effectiveness of our method, we conduct experiments by using the image-text matching as a showcase. Extensive experiments on …
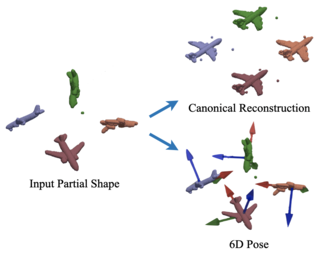
Category-level object pose estimation aims to find 6D object poses of previously unseen object instances from known categories without access to object CAD models. To reduce the huge amount of pose annotations needed for category-level learning, we propose for the first time a self-supervised learning framework to estimate category-level 6D object pose from single 3D point clouds. During training, our method assumes no ground-truth pose annotations, no CAD models, and no multi-view supervision. The key to our method is to disentangle shape and pose through an invariant shape reconstruction module and an equivariant pose estimation module, empowered by SE(3) equivariant point cloud networks. The invariant shape reconstruction module learns to perform aligned reconstructions, yielding a category-level reference frame without using any annotations. In addition, the equivariant pose estimation module achieves category-level pose estimation accuracy that is comparable to some fully supervised methods. Extensive experiments demonstrate the effectiveness of our approach on both complete and partial depth point clouds from the ModelNet40 benchmark, and on real depth point clouds from the NOCS-REAL 275 dataset. The project page with code and visualizations can be found at: dragonlong.github.io/equi-pose.
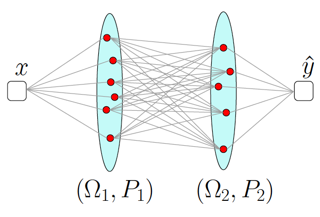
The mean field theory of multilayer neural networks centers around a particular infinite-width scaling, in which the learning dynamics is shown to be closely tracked by the mean field limit. A random fluctuation around this infinite-width limit is expected from a large-width expansion to the next order. This fluctuation has been studied only in the case of shallow networks, where previous works employ heavily technical notions or additional formulation ideas amenable only to that case. Treatment of the multilayer case has been missing, with the chief difficulty in finding a formulation that must capture the stochastic dependency across not only time but also depth.In this work, we initiate the study of the fluctuation in the case of multilayer networks, at any network depth. Leveraging on the neuronal embedding framework recently introduced by Nguyen and Pham, we systematically derive a system of dynamical equations, called the second-order mean field limit, that captures the limiting fluctuation distribution. We demonstrate through the framework the complex interaction among neurons in this second-order mean field limit, the stochasticity with cross-layer dependency and the nonlinear time evolution inherent in the limiting fluctuation. A limit theorem is proven to relate quantitatively this limit to the fluctuation realized …
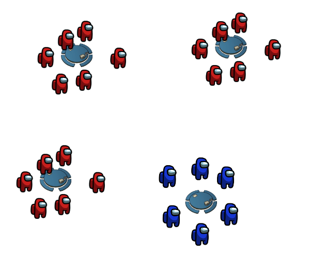
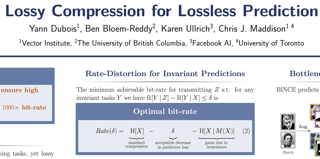
Most data is automatically collected and only ever "seen" by algorithms. Yet, data compressors preserve perceptual fidelity rather than just the information needed by algorithms performing downstream tasks. In this paper, we characterize the bit-rate required to ensure high performance on all predictive tasks that are invariant under a set of transformations, such as data augmentations. Based on our theory, we design unsupervised objectives for training neural compressors. Using these objectives, we train a generic image compressor that achieves substantial rate savings (more than 1000x on ImageNet) compared to JPEG on 8 datasets, without decreasing downstream classification performance.
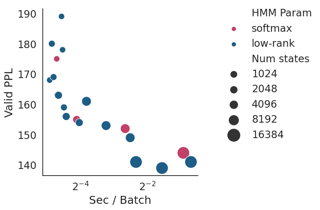
Structured distributions, i.e. distributions over combinatorial spaces, are commonly used to learn latent probabilistic representations from observed data. However, scaling these models is bottlenecked by the high computational and memory complexity with respect to the size of the latent representations. Common models such as Hidden Markov Models (HMMs) and Probabilistic Context-Free Grammars (PCFGs) require time and space quadratic and cubic in the number of hidden states respectively. This work demonstrates a simple approach to reduce the computational and memory complexity of a large class of structured models. We show that by viewing the central inference step as a matrix-vector product and using a low-rank constraint, we can trade off model expressivity and speed via the rank. Experiments with neural parameterized structured models for language modeling, polyphonic music modeling, unsupervised grammar induction, and video modeling show that our approach matches the accuracy of standard models at large state spaces while providing practical speedups.
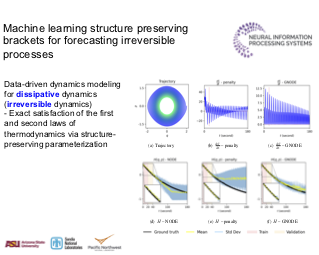
Forecasting of time-series data requires imposition of inductive biases to obtain predictive extrapolation, and recent works have imposed Hamiltonian/Lagrangian form to preserve structure for systems with \emph{reversible} dynamics. In this work we present a novel parameterization of dissipative brackets from metriplectic dynamical systems appropriate for learning \emph{irreversible} dynamics with unknown a priori model form. The process learns generalized Casimirs for energy and entropy guaranteed to be conserved and nondecreasing, respectively. Furthermore, for the case of added thermal noise, we guarantee exact preservation of a fluctuation-dissipation theorem, ensuring thermodynamic consistency. We provide benchmarks for dissipative systems demonstrating learned dynamics are more robust and generalize better than either "black-box" or penalty-based approaches.
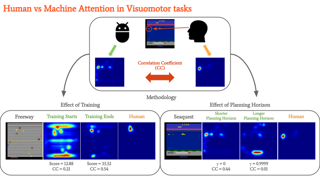
Deep reinforcement learning (RL) algorithms are powerful tools for solving visuomotor decision tasks. However, the trained models are often difficult to interpret, because they are represented as end-to-end deep neural networks. In this paper, we shed light on the inner workings of such trained models by analyzing the pixels that they attend to during task execution, and comparing them with the pixels attended to by humans executing the same tasks. To this end, we investigate the following two questions that, to the best of our knowledge, have not been previously studied. 1) How similar are the visual representations learned by RL agents and humans when performing the same task? and, 2) How do similarities and differences in these learned representations explain RL agents' performance on these tasks? Specifically, we compare the saliency maps of RL agents against visual attention models of human experts when learning to play Atari games. Further, we analyze how hyperparameters of the deep RL algorithm affect the learned representations and saliency maps of the trained agents. The insights provided have the potential to inform novel algorithms for closing the performance gap between human experts and RL agents.
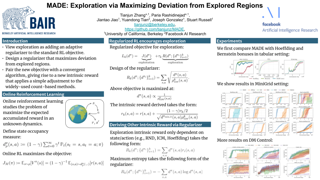
In online reinforcement learning (RL), efficient exploration remains particularly challenging in high-dimensional environments with sparse rewards. In low-dimensional environments, where tabular parameterization is possible, count-based upper confidence bound (UCB) exploration methods achieve minimax near-optimal rates. However, it remains unclear how to efficiently implement UCB in realistic RL tasks that involve non-linear function approximation. To address this, we propose a new exploration approach via maximizing the deviation of the occupancy of the next policy from the explored regions. We add this term as an adaptive regularizer to the standard RL objective to balance exploration vs. exploitation. We pair the new objective with a provably convergent algorithm, giving rise to a new intrinsic reward that adjusts existing bonuses. The proposed intrinsic reward is easy to implement and combine with other existing RL algorithms to conduct exploration. As a proof of concept, we evaluate the new intrinsic reward on tabular examples across a variety of model-based and model-free algorithms, showing improvements over count-only exploration strategies. When tested on navigation and locomotion tasks from MiniGrid and DeepMind Control Suite benchmarks, our approach significantly improves sample efficiency over state-of-the-art methods.
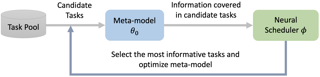
To benefit the learning of a new task, meta-learning has been proposed to transfer a well-generalized meta-model learned from various meta-training tasks. Existing meta-learning algorithms randomly sample meta-training tasks with a uniform probability, under the assumption that tasks are of equal importance. However, it is likely that tasks are detrimental with noise or imbalanced given a limited number of meta-training tasks. To prevent the meta-model from being corrupted by such detrimental tasks or dominated by tasks in the majority, in this paper, we propose an adaptive task scheduler (ATS) for the meta-training process. In ATS, for the first time, we design a neural scheduler to decide which meta-training tasks to use next by predicting the probability being sampled for each candidate task, and train the scheduler to optimize the generalization capacity of the meta-model to unseen tasks. We identify two meta-model-related factors as the input of the neural scheduler, which characterize the difficulty of a candidate task to the meta-model. Theoretically, we show that a scheduler taking the two factors into account improves the meta-training loss and also the optimization landscape. Under the setting of meta-learning with noise and limited budgets, ATS improves the performance on both miniImageNet and a …
Despite remarkable success in a variety of applications, it is well-known that deep learning can fail catastrophically when presented with out-of-distribution data. Toward addressing this challenge, we consider the \emph{domain generalization} problem, wherein predictors are trained using data drawn from a family of related training domains and then evaluated on a distinct and unseen test domain. We show that under a natural model of data generation and a concomitant invariance condition, the domain generalization problem is equivalent to an infinite-dimensional constrained statistical learning problem; this problem forms the basis of our approach, which we call Model-Based Domain Generalization. Due to the inherent challenges in solving constrained optimization problems in deep learning, we exploit nonconvex duality theory to develop unconstrained relaxations of this statistical problem with tight bounds on the duality gap. Based on this theoretical motivation, we propose a novel domain generalization algorithm with convergence guarantees. In our experiments, we report improvements of up to 30% over state-of-the-art domain generalization baselines on several benchmarks including ColoredMNIST, Camelyon17-WILDS, FMoW-WILDS, and PACS.
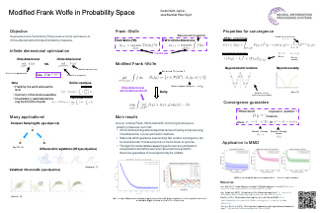
We propose a novel Frank-Wolfe (FW) procedure for the optimization of infinite-dimensional functionals of probability measures - a task which arises naturally in a wide range of areas including statistical learning (e.g. variational inference) and artificial intelligence (e.g. generative adversarial networks). Our FW procedure takes advantage of Wasserstein gradient flows and strong duality results recently developed in Distributionally Robust Optimization so that gradient steps (in the Wasserstein space) can be efficiently computed using finite-dimensional, convex optimization methods. We show how to choose the step sizes in order to guarantee exponentially fast iteration convergence, under mild assumptions on the functional to optimize. We apply our algorithm to a range of functionals arising from applications in nonparametric estimation.
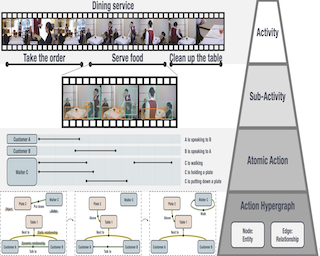
Complex activities often involve multiple humans utilizing different objects to complete actions (e.g., in healthcare settings, physicians, nurses, and patients interact with each other and various medical devices). Recognizing activities poses a challenge that requires a detailed understanding of actors' roles, objects' affordances, and their associated relationships. Furthermore, these purposeful activities are composed of multiple achievable steps, including sub-activities and atomic actions, which jointly define a hierarchy of action parts. This paper introduces Activity Parsing as the overarching task of temporal segmentation and classification of activities, sub-activities, atomic actions, along with an instance-level understanding of actors, objects, and their relationships in videos. Involving multiple entities (actors and objects), we argue that traditional pair-wise relationships, often used in scene or action graphs, do not appropriately represent the dynamics between them. Hence, we introduce Action Hypergraph, a spatial-temporal graph containing hyperedges (i.e., edges with higher-order relationships), as a new representation. In addition, we introduce Multi-Object Multi-Actor (MOMA), the first benchmark and dataset dedicated to activity parsing. Lastly, to parse a video, we propose the HyperGraph Activity Parsing (HGAP) network, which outperforms several baselines, including those based on regular graphs and raw video data.
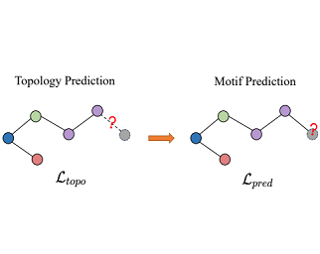
Predicting molecular properties with data-driven methods has drawn much attention in recent years. Particularly, Graph Neural Networks (GNNs) have demonstrated remarkable success in various molecular generation and prediction tasks. In cases where labeled data is scarce, GNNs can be pre-trained on unlabeled molecular data to first learn the general semantic and structural information before being finetuned for specific tasks. However, most existing self-supervised pretraining frameworks for GNNs only focus on node-level or graph-level tasks. These approaches cannot capture the rich information in subgraphs or graph motifs. For example, functional groups (frequently-occurred subgraphs in molecular graphs) often carry indicative information about the molecular properties. To bridge this gap, we propose Motif-based Graph Self-supervised Learning (MGSSL) by introducing a novel self-supervised motif generation framework for GNNs. First, for motif extraction from molecular graphs, we design a molecule fragmentation method that leverages a retrosynthesis-based algorithm BRICS and additional rules for controlling the size of motif vocabulary. Second, we design a general motif-based generative pretraining framework in which GNNs are asked to make topological and label predictions. This generative framework can be implemented in two different ways, i.e., breadth-first or depth-first. Finally, to take the multi-scale information in molecular graphs into consideration, we introduce …
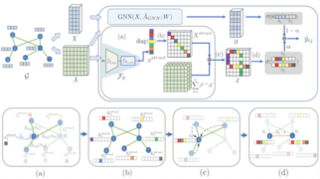
Graph Neural Networks (GNNs) have been widely applied to various fields for learning over graph-structured data. They have shown significant improvements over traditional heuristic methods in various tasks such as node classification and graph classification. However, since GNNs heavily rely on smoothed node features rather than graph structure, they often show poor performance than simple heuristic methods in link prediction where the structural information, e.g., overlapped neighborhoods, degrees, and shortest paths, is crucial. To address this limitation, we propose Neighborhood Overlap-aware Graph Neural Networks (Neo-GNNs) that learn useful structural features from an adjacency matrix and estimate overlapped neighborhoods for link prediction. Our Neo-GNNs generalize neighborhood overlap-based heuristic methods and handle overlapped multi-hop neighborhoods. Our extensive experiments on Open Graph Benchmark datasets (OGB) demonstrate that Neo-GNNs consistently achieve state-of-the-art performance in link prediction.
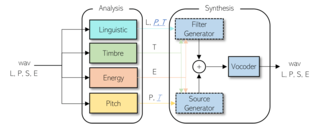
We present a neural analysis and synthesis (NANSY) framework that can manipulate the voice, pitch, and speed of an arbitrary speech signal. Most of the previous works have focused on using information bottleneck to disentangle analysis features for controllable synthesis, which usually results in poor reconstruction quality. We address this issue by proposing a novel training strategy based on information perturbation. The idea is to perturb information in the original input signal (e.g., formant, pitch, and frequency response), thereby letting synthesis networks selectively take essential attributes to reconstruct the input signal. Because NANSY does not need any bottleneck structures, it enjoys both high reconstruction quality and controllability. Furthermore, NANSY does not require any labels associated with speech data such as text and speaker information, but rather uses a new set of analysis features, i.e., wav2vec feature and newly proposed pitch feature, Yingram, which allows for fully self-supervised training. Taking advantage of fully self-supervised training, NANSY can be easily extended to a multilingual setting by simply training it with a multilingual dataset. The experiments show that NANSY can achieve significant improvement in performance in several applications such as zero-shot voice conversion, pitch shift, and time-scale modification.
Recent years have witnessed a surge of approaches to use neural networks to help tackle combinatorial optimization problems, including graph optimization problems. However, theoretical understanding of such approaches remains limited. In this paper, we consider the geometric setting, where graphs are induced by points in a fixed dimensional Euclidean space. We show that several graph optimization problems can be approximated by an algorithm that is polynomial in graph size n via a framework we propose, call the Baker-paradigm. More importantly, a key advantage of the Baker-paradigm is that it decomposes the input problem into (at most linear number of) small sub-problems of fixed sizes (independent of the size of the input). For the family of such fixed-size sub-problems, we can now design neural networks with universal approximation guarantees to solve them. This leads to a mixed algorithmic-ML framework, which we call NN-Baker that has the capacity to approximately solve a family of graph optimization problems (e.g, maximum independent set and minimum vertex cover) in time linear to input graph size, and only polynomial to approximation parameter. We instantiate our NN-Baker by a CNN version and GNN version, and demonstrate the effectiveness and efficiency of our approach via a range of …

Prior AI successes in complex games have largely focused on settings with at most hundreds of actions at each decision point. In contrast, Diplomacy is a game with more than 10^20 possible actions per turn. Previous attempts to address games with large branching factors, such as Diplomacy, StarCraft, and Dota, used human data to bootstrap the policy or used handcrafted reward shaping. In this paper, we describe an algorithm for action exploration and equilibrium approximation in games with combinatorial action spaces. This algorithm simultaneously performs value iteration while learning a policy proposal network. A double oracle step is used to explore additional actions to add to the policy proposals. At each state, the target state value and policy for the model training are computed via an equilibrium search procedure. Using this algorithm, we train an agent, DORA, completely from scratch for a popular two-player variant of Diplomacy and show that it achieves superhuman performance. Additionally, we extend our methods to full-scale no-press Diplomacy and for the first time train an agent from scratch with no human data. We present evidence that this agent plays a strategy that is incompatible with human-data bootstrapped agents. This presents the first strong evidence of …
Efficient exploration under sparse rewards remains a key challenge in deep reinforcement learning. Previous exploration methods (e.g., RND) have achieved strong results in multiple hard tasks. However, if there are multiple novel areas to explore, these methods often focus quickly on one without sufficiently trying others (like a depth-wise first search manner). In some scenarios (e.g., four corridor environment in Sec 4.2), we observe they explore in one corridor for long and fail to cover all the states. On the other hand, in theoretical RL, with optimistic initialization and the inverse square root of visitation count as a bonus, it won't suffer from this and explores different novel regions alternatively (like a breadth-first search manner). In this paper, inspired by this, we propose a simple but effective criterion called NovelD by weighting every novel area approximately equally. Our algorithm is very simple but yet shows comparable performance or even outperforms multiple SOTA exploration methods in many hard exploration tasks. Specifically, NovelD solves all the static procedurally-generated tasks in Mini-Grid with just 120M environment steps, without any curriculum learning. In comparison, the previous SOTA only solves 50% of them. NovelD also achieves SOTA on multiple tasks in NetHack, a rogue-like game …
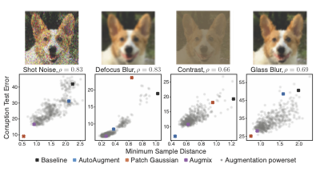
Invariance to a broad array of image corruptions, such as warping, noise, or color shifts, is an important aspect of building robust models in computer vision. Recently, several new data augmentations have been proposed that significantly improve performance on ImageNet-C, a benchmark of such corruptions. However, there is still a lack of basic understanding on the relationship between data augmentations and test-time corruptions. To this end, we develop a feature space for image transforms, and then use a new measure in this space between augmentations and corruptions called the Minimal Sample Distance to demonstrate there is a strong correlation between similarity and performance. We then investigate recent data augmentations and observe a significant degradation in corruption robustness when the test-time corruptions are sampled to be perceptually dissimilar from ImageNet-C in this feature space. Our results suggest that test error can be improved by training on perceptually similar augmentations, and data augmentations may not generalize well beyond the existing benchmark. We hope our results and tools will allow for more robust progress towards improving robustness to image corruptions. We provide code at https://github.com/facebookresearch/augmentation-corruption.
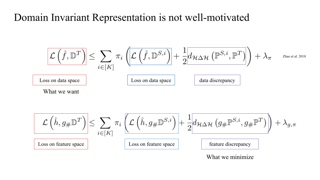
Domain adaptation (DA) benefits from the rigorous theoretical works that study its insightful characteristics and various aspects, e.g., learning domain-invariant representations and its trade-off. However, it seems not the case for the multiple source DA and domain generalization (DG) settings which are remarkably more complicated and sophisticated due to the involvement of multiple source domains and potential unavailability of target domain during training. In this paper, we develop novel upper-bounds for the target general loss which appeal us to define two kinds of domain-invariant representations. We further study the pros and cons as well as the trade-offs of enforcing learning each domain-invariant representation. Finally, we conduct experiments to inspect the trade-off of these representations for offering practical hints regarding how to use them in practice and explore other interesting properties of our developed theory.
A number of recent studies of continuous variational autoencoder (VAE) models have noted, either directly or indirectly, the tendency of various parameter gradients to drift towards infinity during training. Because such gradients could potentially contribute to numerical instabilities, and are often framed as a problematic phenomena to be avoided, it may be tempting to shift to alternative energy functions that guarantee bounded gradients. But it remains an open question: What might the unintended consequences of such a restriction be? To address this issue, we examine how unbounded gradients relate to the regularization of a broad class of autoencoder-based architectures, including VAE models, as applied to data lying on or near a low-dimensional manifold (e.g., natural images). Our main finding is that, if the ultimate goal is to simultaneously avoid over-regularization (high reconstruction errors, sometimes referred to as posterior collapse) and under-regularization (excessive latent dimensions are not pruned from the model), then an autoencoder-based energy function with infinite gradients around optimal representations is provably required per a certain technical sense which we carefully detail. Given that both over- and under-regularization can directly lead to poor generated sample quality or suboptimal feature selection, this result suggests that heuristic modifications to or constraints …
In the realm of deep learning, the Fisher information matrix (FIM) gives novel insights and useful tools to characterize the loss landscape, perform second-order optimization, and build geometric learning theories. The exact FIM is either unavailable in closed form or too expensive to compute. In practice, it is almost always estimated based on empirical samples. We investigate two such estimators based on two equivalent representations of the FIM --- both unbiased and consistent. Their estimation quality is naturally gauged by their variance given in closed form. We analyze how the parametric structure of a deep neural network can affect the variance. The meaning of this variance measure and its upper bounds are then discussed in the context of deep learning.
Learning with noisy labels is a practically challenging problem in weakly supervised learning. In the existing literature, open-set noises are always considered to be poisonous for generalization, similar to closed-set noises. In this paper, we empirically show that open-set noisy labels can be non-toxic and even benefit the robustness against inherent noisy labels. Inspired by the observations, we propose a simple yet effective regularization by introducing Open-set samples with Dynamic Noisy Labels (ODNL) into training. With ODNL, the extra capacity of the neural network can be largely consumed in a way that does not interfere with learning patterns from clean data. Through the lens of SGD noise, we show that the noises induced by our method are random-direction, conflict-free and biased, which may help the model converge to a flat minimum with superior stability and enforce the model to produce conservative predictions on Out-of-Distribution instances. Extensive experimental results on benchmark datasets with various types of noisy labels demonstrate that the proposed method not only enhances the performance of many existing robust algorithms but also achieves significant improvement on Out-of-Distribution detection tasks even in the label noise setting.
In real word applications, data generating process for training a machine learning model often differs from what the model encounters in the test stage. Understanding how and whether machine learning models generalize under such distributional shifts have been a theoretical challenge. Here, we study generalization in kernel regression when the training and test distributions are different using methods from statistical physics. Using the replica method, we derive an analytical formula for the out-of-distribution generalization error applicable to any kernel and real datasets. We identify an overlap matrix that quantifies the mismatch between distributions for a given kernel as a key determinant of generalization performance under distribution shift. Using our analytical expressions we elucidate various generalization phenomena including possible improvement in generalization when there is a mismatch. We develop procedures for optimizing training and test distributions for a given data budget to find best and worst case generalizations under the shift. We present applications of our theory to real and synthetic datasets and for many kernels. We compare results of our theory applied to Neural Tangent Kernel with simulations of wide networks and show agreement. We analyze linear regression in further depth.
A significant obstacle in the development of robust machine learning models is \emph{covariate shift}, a form of distribution shift that occurs when the input distributions of the training and test sets differ while the conditional label distributions remain the same. Despite the prevalence of covariate shift in real-world applications, a theoretical understanding in the context of modern machine learning has remained lacking. In this work, we examine the exact high-dimensional asymptotics of random feature regression under covariate shift and present a precise characterization of the limiting test error, bias, and variance in this setting. Our results motivate a natural partial order over covariate shifts that provides a sufficient condition for determining when the shift will harm (or even help) test performance. We find that overparameterized models exhibit enhanced robustness to covariate shift, providing one of the first theoretical explanations for this ubiquitous empirical phenomenon. Additionally, our analysis reveals an exact linear relationship between the in-distribution and out-of-distribution generalization performance, offering an explanation for this surprising recent observation.
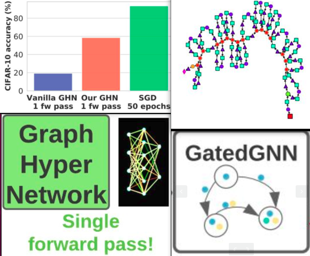
Deep learning has been successful in automating the design of features in machine learning pipelines. However, the algorithms optimizing neural network parameters remain largely hand-designed and computationally inefficient. We study if we can use deep learning to directly predict these parameters by exploiting the past knowledge of training other networks. We introduce a large-scale dataset of diverse computational graphs of neural architectures - DeepNets-1M - and use it to explore parameter prediction on CIFAR-10 and ImageNet. By leveraging advances in graph neural networks, we propose a hypernetwork that can predict performant parameters in a single forward pass taking a fraction of a second, even on a CPU. The proposed model achieves surprisingly good performance on unseen and diverse networks. For example, it is able to predict all 24 million parameters of a ResNet-50 achieving a 60% accuracy on CIFAR-10. On ImageNet, top-5 accuracy of some of our networks approaches 50%. Our task along with the model and results can potentially lead to a new, more computationally efficient paradigm of training networks. Our model also learns a strong representation of neural architectures enabling their analysis.
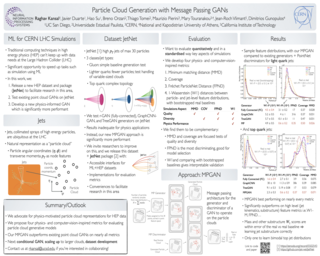
In high energy physics (HEP), jets are collections of correlated particles produced ubiquitously in particle collisions such as those at the CERN Large Hadron Collider (LHC). Machine learning (ML)-based generative models, such as generative adversarial networks (GANs), have the potential to significantly accelerate LHC jet simulations. However, despite jets having a natural representation as a set of particles in momentum-space, a.k.a. a particle cloud, there exist no generative models applied to such a dataset. In this work, we introduce a new particle cloud dataset (JetNet), and apply to it existing point cloud GANs. Results are evaluated using (1) 1-Wasserstein distances between high- and low-level feature distributions, (2) a newly developed Fréchet ParticleNet Distance, and (3) the coverage and (4) minimum matching distance metrics. Existing GANs are found to be inadequate for physics applications, hence we develop a new message passing GAN (MPGAN), which outperforms existing point cloud GANs on virtually every metric and shows promise for use in HEP. We propose JetNet as a novel point-cloud-style dataset for the ML community to experiment with, and set MPGAN as a benchmark to improve upon for future generative models. Additionally, to facilitate research and improve accessibility and reproducibility in this area, we …
Transformers have become one of the most important architectural innovations in deep learning and have enabled many breakthroughs over the past few years. Here we propose a simple network architecture, gMLP, based solely on MLPs with gating, and show that it can perform as well as Transformers in key language and vision applications. Our comparisons show that self-attention is not critical for Vision Transformers, as gMLP can achieve the same accuracy. For BERT, our model achieves parity with Transformers on pretraining perplexity and is better on some downstream NLP tasks. On finetuning tasks where gMLP performs worse, making the gMLP model substantially larger can close the gap with Transformers. In general, our experiments show that gMLP can scale as well as Transformers over increased data and compute.
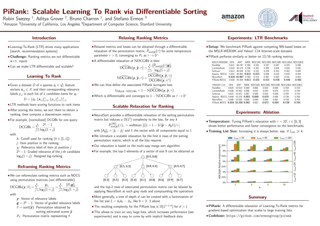
A key challenge with machine learning approaches for ranking is the gap between the performance metrics of interest and the surrogate loss functions that can be optimized with gradient-based methods. This gap arises because ranking metrics typically involve a sorting operation which is not differentiable w.r.t. the model parameters. Prior works have proposed surrogates that are loosely related to ranking metrics or simple smoothed versions thereof, and often fail to scale to real-world applications. We propose PiRank, a new class of differentiable surrogates for ranking, which employ a continuous, temperature-controlled relaxation to the sorting operator based on NeuralSort [1]. We show that PiRank exactly recovers the desired metrics in the limit of zero temperature and further propose a divide-and-conquer extension that scales favorably to large list sizes, both in theory and practice. Empirically, we demonstrate the role of larger list sizes during training and show that PiRank significantly improves over comparable approaches on publicly available Internet-scale learning-to-rank benchmarks.
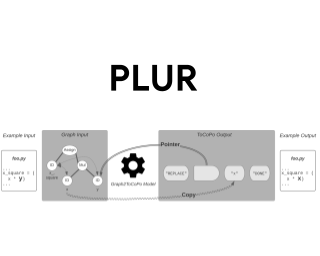
Machine learning for understanding and editing source code has recently attracted significant interest, with many developments in new models, new code representations, and new tasks.This proliferation can appear disparate and disconnected, making each approach seemingly unique and incompatible, thus obscuring the core machine learning challenges and contributions.In this work, we demonstrate that the landscape can be significantly simplified by taking a general approach of mapping a graph to a sequence of tokens and pointers.Our main result is to show that 16 recently published tasks of different shapes can be cast in this form, based on which a single model architecture achieves near or above state-of-the-art results on nearly all tasks, outperforming custom models like code2seq and alternative generic models like Transformers.This unification further enables multi-task learning and a series of cross-cutting experiments about the importance of different modeling choices for code understanding and repair tasks.The full framework, called PLUR, is easily extensible to more tasks, and will be open-sourced (https://github.com/google-research/plur).
Finding diverse and representative Pareto solutions from the Pareto front is a key challenge in multi-objective optimization (MOO). In this work, we propose a novel gradient-based algorithm for profiling Pareto front by using Stein variational gradient descent (SVGD). We also provide a counterpart of our method based on Langevin dynamics. Our methods iteratively update a set of points in a parallel fashion to push them towards the Pareto front using multiple gradient descent, while encouraging the diversity between the particles by using the repulsive force mechanism in SVGD, or diffusion noise in Langevin dynamics. Compared with existing gradient-based methods that require predefined preference functions, our method can work efficiently in high dimensional problems, and can obtain more diverse solutions evenly distributed in the Pareto front. Moreover, our methods are theoretically guaranteed to converge to the Pareto front. We demonstrate the effectiveness of our method, especially the SVGD algorithm, through extensive experiments, showing its superiority over existing gradient-based algorithms.
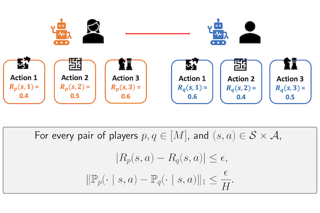
We study multi-task reinforcement learning (RL) in tabular episodic Markov decision processes (MDPs). We formulate a heterogeneous multi-player RL problem, in which a group of players concurrently face similar but not necessarily identical MDPs, with a goal of improving their collective performance through inter-player information sharing. We design and analyze a model-based algorithm, and provide gap-dependent and gap-independent regret upper and lower bounds that characterize the intrinsic complexity of the problem.
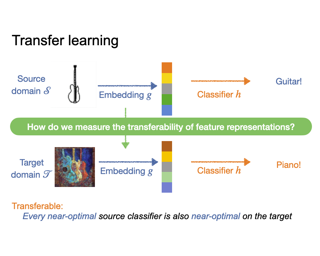
Out-of-distribution generalization is one of the key challenges when transferring a model from the lab to the real world. Existing efforts mostly focus on building invariant features among source and target domains. Based on invariant features, a high-performing classifier on source domains could hopefully behave equally well on a target domain. In other words, we hope the invariant features to be \emph{transferable}. However, in practice, there are no perfectly transferable features, and some algorithms seem to learn ``more transferable'' features than others. How can we understand and quantify such \emph{transferability}? In this paper, we formally define transferability that one can quantify and compute in domain generalization. We point out the difference and connection with common discrepancy measures between domains, such as total variation and Wasserstein distance. We then prove that our transferability can be estimated with enough samples and give a new upper bound for the target error based on our transferability. Empirically, we evaluate the transferability of the feature embeddings learned by existing algorithms for domain generalization. Surprisingly, we find that many algorithms are not quite learning transferable features, although few could still survive. In light of this, we propose a new algorithm for learning transferable features and test …
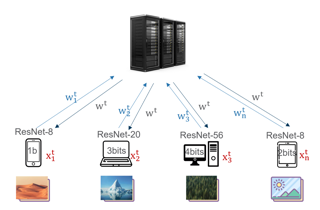
Traditionally, federated learning (FL) aims to train a single global model while collaboratively using multiple clients and a server. Two natural challenges that FL algorithms face are heterogeneity in data across clients and collaboration of clients with diverse resources. In this work, we introduce a quantized and personalized FL algorithm QuPeD that facilitates collective (personalized model compression) training via knowledge distillation (KD) among clients who have access to heterogeneous data and resources. For personalization, we allow clients to learn compressed personalized models with different quantization parameters and model dimensions/structures. Towards this, first we propose an algorithm for learning quantized models through a relaxed optimization problem, where quantization values are also optimized over. When each client participating in the (federated) learning process has different requirements of the compressed model (both in model dimension and precision), we formulate a compressed personalization framework by introducing knowledge distillation loss for local client objectives collaborating through a global model. We develop an alternating proximal gradient update for solving this compressed personalization problem, and analyze its convergence properties. Numerically, we validate that QuPeD outperforms competing personalized FL methods, FedAvg, and local training of clients in various heterogeneous settings.
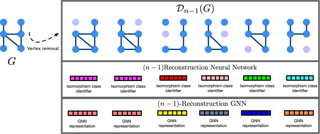
Graph neural networks (GNNs) have limited expressive power, failing to represent many graph classes correctly. While more expressive graph representation learning (GRL) alternatives can distinguish some of these classes, they are significantly harder to implement, may not scale well, and have not been shown to outperform well-tuned GNNs in real-world tasks. Thus, devising simple, scalable, and expressive GRL architectures that also achieve real-world improvements remains an open challenge. In this work, we show the extent to which graph reconstruction---reconstructing a graph from its subgraphs---can mitigate the theoretical and practical problems currently faced by GRL architectures. First, we leverage graph reconstruction to build two new classes of expressive graph representations. Secondly, we show how graph reconstruction boosts the expressive power of any GNN architecture while being a (provably) powerful inductive bias for invariances to vertex removals. Empirically, we show how reconstruction can boost GNN's expressive power---while maintaining its invariance to permutations of the vertices---by solving seven graph property tasks not solvable by the original GNN. Further, we demonstrate how it boosts state-of-the-art GNN's performance across nine real-world benchmark datasets.
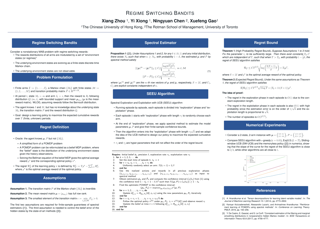
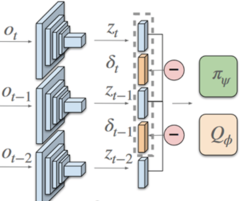
Temporal information is essential to learning effective policies with Reinforcement Learning (RL). However, current state-of-the-art RL algorithms either assume that such information is given as part of the state space or, when learning from pixels, use the simple heuristic of frame-stacking to implicitly capture temporal information present in the image observations. This heuristic is in contrast to the current paradigm in video classification architectures, which utilize explicit encodings of temporal information through methods such as optical flow and two-stream architectures to achieve state-of-the-art performance. Inspired by leading video classification architectures, we introduce the Flow of Latents for Reinforcement Learning (Flare), a network architecture for RL that explicitly encodes temporal information through latent vector differences. We show that Flare recovers optimal performance in state-based RL without explicit access to the state velocity, solely with positional state information. Flare is the most sample efficient model-free pixel-based RL algorithm on the DeepMind Control suite when evaluated on the 500k and 1M step benchmarks across 5 challenging control tasks, and, when used with Rainbow DQN, outperforms the competitive baseline on Atari games at 100M time step benchmark across 8 challenging games.
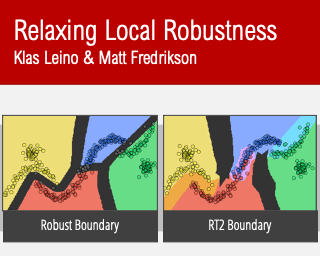
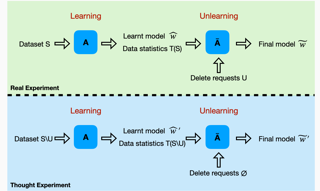
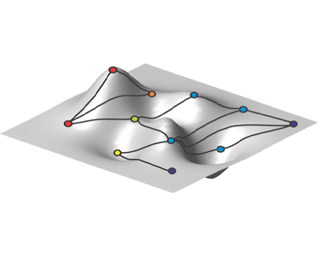
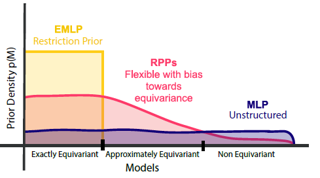
Models such as convolutional neural networks restrict the hypothesis space to a set of functions satisfying equivariance constraints, and improve generalization in problems by capturing relevant symmetries. However, symmetries are often only partially respected, preventing models with restriction biases from fitting the data. We introduce Residual Pathway Priors (RPPs) as a method for converting hard architectural constraints into soft priors, guiding models towards structured solutions while retaining the ability to capture additional complexity. RPPs are resilient to approximate or misspecified symmetries, and are as effective as fully constrained models even when symmetries are exact. We show that RPPs provide compelling performance on both model-free and model-based reinforcement learning problems, where contact forces and directional rewards violate the assumptions of equivariant networks. Finally, we demonstrate that RPPs have broad applicability, including dynamical systems, regression, and classification.
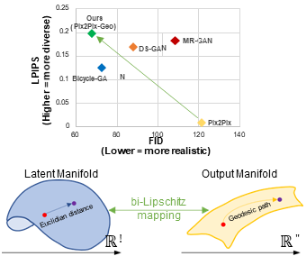
Conditional GANs (cGAN), in their rudimentary form, suffer from critical drawbacks such as the lack of diversity in generated outputs and distortion between the latent and output manifolds. Although efforts have been made to improve results, they can suffer from unpleasant side-effects such as the topology mismatch between latent and output spaces. In contrast, we tackle this problem from a geometrical perspective and propose a novel training mechanism that increases both the diversity and the visual quality of a vanilla cGAN, by systematically encouraging a bi-lipschitz mapping between the latent and the output manifolds. We validate the efficacy of our solution on a baseline cGAN (i.e., Pix2Pix) which lacks diversity, and show that by only modifying its training mechanism (i.e., with our proposed Pix2Pix-Geo), one can achieve more diverse and realistic outputs on a broad set of image-to-image translation tasks.
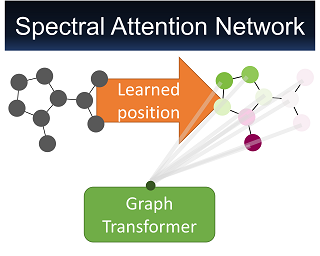
In recent years, the Transformer architecture has proven to be very successful in sequence processing, but its application to other data structures, such as graphs, has remained limited due to the difficulty of properly defining positions. Here, we present the \textit{Spectral Attention Network} (SAN), which uses a learned positional encoding (LPE) that can take advantage of the full Laplacian spectrum to learn the position of each node in a given graph.This LPE is then added to the node features of the graph and passed to a fully-connected Transformer.By leveraging the full spectrum of the Laplacian, our model is theoretically powerful in distinguishing graphs, and can better detect similar sub-structures from their resonance.Further, by fully connecting the graph, the Transformer does not suffer from over-squashing, an information bottleneck of most GNNs, and enables better modeling of physical phenomenons such as heat transfer and electric interaction.When tested empirically on a set of 4 standard datasets, our model performs on par or better than state-of-the-art GNNs, and outperforms any attention-based model by a wide margin, becoming the first fully-connected architecture to perform well on graph benchmarks.
An important goal of AutoML is to automate-away the design of neural networks on new tasks in under-explored domains. Motivated by this goal, we study the problem of enabling users to discover the right neural operations given data from their specific domain. We introduce a search space of operations called XD-Operations that mimic the inductive bias of standard multi-channel convolutions while being much more expressive: we prove that it includes many named operations across multiple application areas. Starting with any standard backbone such as ResNet, we show how to transform it into a search space over XD-operations and how to traverse the space using a simple weight sharing scheme. On a diverse set of tasks—solving PDEs, distance prediction for protein folding, and music modeling—our approach consistently yields models with lower error than baseline networks and often even lower error than expert-designed domain-specific approaches.

Learned optimizers are parametric algorithms that can themselves be trained to solve optimization problems. In contrast to baseline optimizers (such as momentum or Adam) that use simple update rules derived from theoretical principles, learned optimizers use flexible, high-dimensional, nonlinear parameterizations. Although this can lead to better performance, their inner workings remain a mystery. How is a given learned optimizer able to outperform a well tuned baseline? Has it learned a sophisticated combination of existing optimization techniques, or is it implementing completely new behavior? In this work, we address these questions by careful analysis and visualization of learned optimizers. We study learned optimizers trained from scratch on four disparate tasks, and discover that they have learned interpretable behavior, including: momentum, gradient clipping, learning rate schedules, and new forms of learning rate adaptation. Moreover, we show how dynamics and mechanisms inside of learned optimizers orchestrate these computations. Our results help elucidate the previously murky understanding of how learned optimizers work, and establish tools for interpreting future learned optimizers.
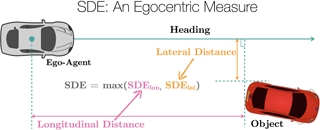
3D object detection is a key module for safety-critical robotics applications such as autonomous driving. For these applications, we care most about how the detections affect the ego-agent’s behavior and safety (the egocentric perspective). Intuitively, we seek more accurate descriptions of object geometry when it’s more likely to interfere with the ego-agent’s motion trajectory. However, current detection metrics, based on box Intersection-over-Union (IoU), are object-centric and aren’t designed to capture the spatio-temporal relationship between objects and the ego-agent. To address this issue, we propose a new egocentric measure to evaluate 3D object detection, namely Support Distance Error (SDE). Our analysis based on SDE reveals that the egocentric detection quality is bounded by the coarse geometry of the bounding boxes. Given the insight that SDE would benefit from more accurate geometry descriptions, we propose to represent objects as amodal contours, specifically amodal star-shaped polygons, and devise a simple model, StarPoly, to predict such contours. Our experiments on the large-scale Waymo Open Dataset show that SDE better reflects the impact of detection quality on the ego-agent’s safety compared to IoU; and the estimated contours from StarPoly consistently improve the egocentric detection quality over recent 3D object detectors.
In classic auction theory, reserve prices are known to be effective for improving revenue for the auctioneer against quasi-linear utility maximizing bidders. The introduction of reserve prices, however, usually do not help improve total welfare of the auctioneer and the bidders. In this paper, we focus on value maximizing bidders with return on spend constraints---a paradigm that has drawn considerable attention recently as more advertisers adopt auto-bidding algorithms in advertising platforms---and show that the introduction of reserve prices has a novel impact on the market. Namely, by choosing reserve prices appropriately the auctioneer can improve not only the total revenue but also the total welfare. Our results also demonstrate that reserve prices are robust to bidder types, i.e., reserve prices work well for different bidder types, such as value maximizers and utility maximizers, without using bidder type information. We generalize these results for a variety of auction mechanisms such as VCG, GSP, and first-price auctions. Moreover, we show how to combine these results with additive boosts to improve the welfare of the outcomes of the auction further. Finally, we complement our theoretical observations with an empirical study confirming the effectiveness of these ideas using data from online advertising auctions.
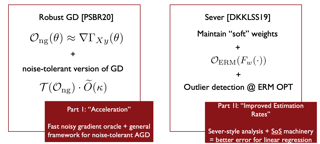
We study fast algorithms for statistical regression problems under the strong contamination model, where the goal is to approximately optimize a generalized linear model (GLM) given adversarially corrupted samples. Prior works in this line of research were based on the \emph{robust gradient descent} framework of \cite{PrasadSBR20}, a first-order method using biased gradient queries, or the \emph{Sever} framework of \cite{DiakonikolasKK019}, an iterative outlier-removal method calling a stationary point finder. We present nearly-linear time algorithms for robust regression problems with improved runtime or estimation guarantees compared to the state-of-the-art. For the general case of smooth GLMs (e.g.\ logistic regression), we show that the robust gradient descent framework of \cite{PrasadSBR20} can be \emph{accelerated}, and show our algorithm extends to optimizing the Moreau envelopes of Lipschitz GLMs (e.g.\ support vector machines), answering several open questions in the literature. For the well-studied case of robust linear regression, we present an alternative approach obtaining improved estimation rates over prior nearly-linear time algorithms. Interestingly, our algorithm starts with an identifiability proof introduced in the context of the sum-of-squares algorithm of \cite{BakshiP21}, which achieved optimal error rates while requiring large polynomial runtime and sample complexity. We reinterpret their proof within the Sever framework and obtain a dramatically faster …
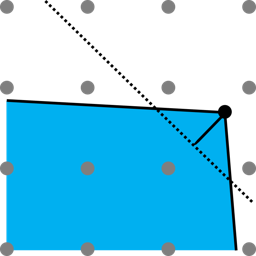
Cutting-plane methods have enabled remarkable successes in integer programming over the last few decades. State-of-the-art solvers integrate a myriad of cutting-plane techniques to speed up the underlying tree-search algorithm used to find optimal solutions. In this paper we provide sample complexity bounds for cut-selection in branch-and-cut (B&C). Given a training set of integer programs sampled from an application-specific input distribution and a family of cut selection policies, these guarantees bound the number of samples sufficient to ensure that using any policy in the family, the size of the tree B&C builds on average over the training set is close to the expected size of the tree B&C builds. We first bound the sample complexity of learning cutting planes from the canonical family of Chvátal-Gomory cuts. Our bounds handle any number of waves of any number of cuts and are fine tuned to the magnitudes of the constraint coefficients. Next, we prove sample complexity bounds for more sophisticated cut selection policies that use a combination of scoring rules to choose from a family of cuts. Finally, beyond the realm of cutting planes for integer programming, we develop a general abstraction of tree search that captures key components such as node selection …
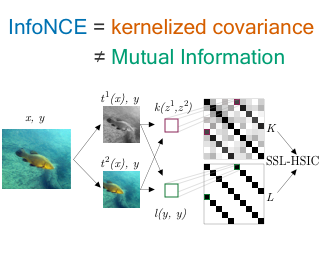
We approach self-supervised learning of image representations from a statistical dependence perspective, proposing Self-Supervised Learning with the Hilbert-Schmidt Independence Criterion (SSL-HSIC). SSL-HSIC maximizes dependence between representations of transformations of an image and the image identity, while minimizing the kernelized variance of those representations. This framework yields a new understanding of InfoNCE, a variational lower bound on the mutual information (MI) between different transformations. While the MI itself is known to have pathologies which can result in learning meaningless representations, its bound is much better behaved: we show that it implicitly approximates SSL-HSIC (with a slightly different regularizer).Our approach also gives us insight into BYOL, a negative-free SSL method, since SSL-HSIC similarly learns local neighborhoods of samples. SSL-HSIC allows us to directly optimize statistical dependence in time linear in the batch size, without restrictive data assumptions or indirect mutual information estimators. Trained with or without a target network, SSL-HSIC matches the current state-of-the-art for standard linear evaluation on ImageNet, semi-supervised learning and transfer to other classification and vision tasks such as semantic segmentation, depth estimation and object recognition. Code is available at https://github.com/deepmind/ssl_hsic.
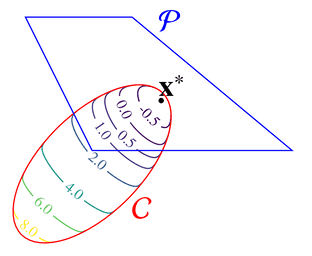
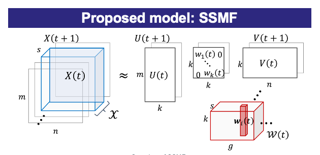
Given taxi-ride counts information between departure and destination locations, how can we forecast their future demands? In general, given a data stream of events with seasonal patterns that innovate over time, how can we effectively and efficiently forecast future events? In this paper, we propose Shifting Seasonal Matrix Factorization approach, namely SSMF, that can adaptively learn multiple seasonal patterns (called regimes), as well as switching between them. Our proposed method has the following properties: (a) it accurately forecasts future events by detecting regime shifts in seasonal patterns as the data stream evolves; (b) it works in an online setting, i.e., processes each observation in constant time and memory; (c) it effectively realizes regime shifts without human intervention by using a lossless data compression scheme. We demonstrate that our algorithm outperforms state-of-the-art baseline methods by accurately forecasting upcoming events on three real-world data streams.

We consider a class-incremental semantic segmentation (CISS) problem. While some recently proposed algorithms utilized variants of knowledge distillation (KD) technique to tackle the problem, they only partially addressed the key additional challenges in CISS that causes the catastrophic forgetting; \textit{i.e.}, the semantic drift of the background class and multi-label prediction issue. To better address these challenges, we propose a new method, dubbed as SSUL-M (Semantic Segmentation with Unknown Label with Memory), by carefully combining several techniques tailored for semantic segmentation. More specifically, we make three main contributions; (1) modeling \textit{unknown} class within the background class to help learning future classes (help plasticity), (2) \textit{freezing} backbone network and past classifiers with binary cross-entropy loss and pseudo-labeling to overcome catastrophic forgetting (help stability), and (3) utilizing \textit{tiny exemplar memory} for the first time in CISS to improve \textit{both} plasticity and stability. As a result, we show our method achieves significantly better performance than the recent state-of-the-art baselines on the standard benchmark datasets. Furthermore, we justify our contributions with thorough and extensive ablation analyses and discuss different natures of the CISS problem compared to the standard class-incremental learning for classification. The official code is available at https://github.com/clovaai/SSUL.
Automated decision-making tools increasingly assess individuals to determine if they qualify for high-stakes opportunities. A recent line of research investigates how strategic agents may respond to such scoring tools to receive favorable assessments. While prior work has focused on the short-term strategic interactions between a decision-making institution (modeled as a principal) and individual decision-subjects (modeled as agents), we investigate interactions spanning multiple time-steps. In particular, we consider settings in which the agent's effort investment today can accumulate over time in the form of an internal state - impacting both his future rewards and that of the principal. We characterize the Stackelberg equilibrium of the resulting game and provide novel algorithms for computing it. Our analysis reveals several intriguing insights about the role of multiple interactions in shaping the game's outcome: First, we establish that in our stateful setting, the class of all linear assessment policies remains as powerful as the larger class of all monotonic assessment policies. While recovering the principal's optimal policy requires solving a non-convex optimization problem, we provide polynomial-time algorithms for recovering both the principal and agent's optimal policies under common assumptions about the process by which effort investments convert to observable features. Most importantly, we show …
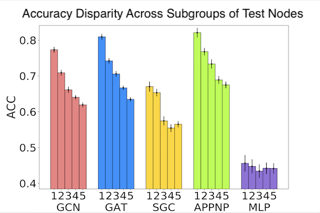
Despite enormous successful applications of graph neural networks (GNNs), theoretical understanding of their generalization ability, especially for node-level tasks where data are not independent and identically-distributed (IID), has been sparse. The theoretical investigation of the generalization performance is beneficial for understanding fundamental issues (such as fairness) of GNN models and designing better learning methods. In this paper, we present a novel PAC-Bayesian analysis for GNNs under a non-IID semi-supervised learning setup. Moreover, we analyze the generalization performances on different subgroups of unlabeled nodes, which allows us to further study an accuracy-(dis)parity-style (un)fairness of GNNs from a theoretical perspective. Under reasonable assumptions, we demonstrate that the distance between a test subgroup and the training set can be a key factor affecting the GNN performance on that subgroup, which calls special attention to the training node selection for fair learning. Experiments across multiple GNN models and datasets support our theoretical results.
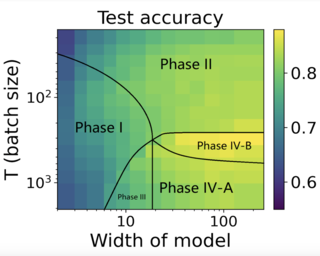
Viewing neural network models in terms of their loss landscapes has a long history in the statistical mechanics approach to learning, and in recent years it has received attention within machine learning proper. Among other things, local metrics (such as the smoothness of the loss landscape) have been shown to correlate with global properties of the model (such as good generalization performance). Here, we perform a detailed empirical analysis of the loss landscape structure of thousands of neural network models, systematically varying learning tasks, model architectures, and/or quantity/quality of data. By considering a range of metrics that attempt to capture different aspects of the loss landscape, we demonstrate that the best test accuracy is obtained when: the loss landscape is globally well-connected; ensembles of trained models are more similar to each other; and models converge to locally smooth regions. We also show that globally poorly-connected landscapes can arise when models are small or when they are trained to lower quality data; and that, if the loss landscape is globally poorly-connected, then training to zero loss can actually lead to worse test accuracy. Our detailed empirical results shed light on phases of learning (and consequent double descent behavior), fundamental versus incidental …

We study the sample complexity of teaching, termed as "teaching dimension" (TD) in the literature, for the learning-with-equivalence-queries (LwEQ) paradigm. More concretely, we consider a learner who asks equivalence queries (i.e., "is the queried hypothesis the target hypothesis?"), and a teacher responds either "yes" or "no" along with a counterexample to the queried hypothesis. This learning paradigm has been extensively studied when the learner receives worst-case or random counterexamples; in this paper, we consider the optimal teacher who picks best-case counterexamples to teach the target hypothesis within a hypothesis class. For this optimal teacher, we introduce LwEQ-TD, a notion of TD capturing the teaching complexity (i.e., the number of queries made) in this paradigm. We show that a significant reduction in queries can be achieved with best-case counterexamples, in contrast to worst-case or random counterexamples, for different hypothesis classes. Furthermore, we establish new connections of LwEQ-TD to the well-studied notions of TD in the learning-from-samples paradigm.
For video recognition task, a global representation summarizing the whole contents of the video snippets plays an important role for the final performance. However, existing video architectures usually generate it by using a simple, global average pooling (GAP) method, which has limited ability to capture complex dynamics of videos. For image recognition task, there exist evidences showing that covariance pooling has stronger representation ability than GAP. Unfortunately, such plain covariance pooling used in image recognition is an orderless representative, which cannot model spatio-temporal structure inherent in videos. Therefore, this paper proposes a Temporal-attentive Covariance Pooling (TCP), inserted at the end of deep architectures, to produce powerful video representations. Specifically, our TCP first develops a temporal attention module to adaptively calibrate spatio-temporal features for the succeeding covariance pooling, approximatively producing attentive covariance representations. Then, a temporal covariance pooling performs temporal pooling of the attentive covariance representations to characterize both intra-frame correlations and inter-frame cross-correlations of the calibrated features. As such, the proposed TCP can capture complex temporal dynamics. Finally, a fast matrix power normalization is introduced to exploit geometry of covariance representations. Note that our TCP is model-agnostic and can be flexibly integrated into any video architectures, resulting in TCPNet for …
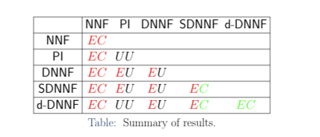
Probabilistic circuits (PCs) are a powerful modeling framework for representing tractable probability distributions over combinatorial spaces. In machine learning and probabilistic programming, one is often interested in understanding whether the distributions learned using PCs are close to the desired distribution. Thus, given two probabilistic circuits, a fundamental problem of interest is to determine whether their distributions are close to each other.The primary contribution of this paper is a closeness test for PCs with respect to the total variation distance metric. Our algorithm utilizes two common PC queries, counting and sampling. In particular, we provide a poly-time probabilistic algorithm to check the closeness of two PCs, when the PCs support tractable approximate counting and sampling. We demonstrate the practical efficiency of our algorithmic framework via a detailed experimental evaluation of a prototype implementation against a set of 375 PC benchmarks. We find that our test correctly decides the closeness of all 375 PCs within 3600 seconds.
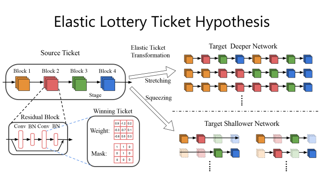
Lottery Ticket Hypothesis (LTH) raises keen attention to identifying sparse trainable subnetworks, or winning tickets, which can be trained in isolation to achieve similar or even better performance compared to the full models. Despite many efforts being made, the most effective method to identify such winning tickets is still Iterative Magnitude-based Pruning (IMP), which is computationally expensive and has to be run thoroughly for every different network. A natural question that comes in is: can we “transform” the winning ticket found in one network to another with a different architecture, yielding a winning ticket for the latter at the beginning, without re-doing the expensive IMP? Answering this question is not only practically relevant for efficient “once-for-all” winning ticket finding, but also theoretically appealing for uncovering inherently scalable sparse patterns in networks. We conduct extensive experiments on CIFAR-10 and ImageNet, and propose a variety of strategies to tweak the winning tickets found from different networks of the same model family (e.g., ResNets). Based on these results, we articulate the Elastic Lottery Ticket Hypothesis (E-LTH): by mindfully replicating (or dropping) and re-ordering layers for one network, its corresponding winning ticket could be stretched (or squeezed) into a subnetwork for another deeper (or …
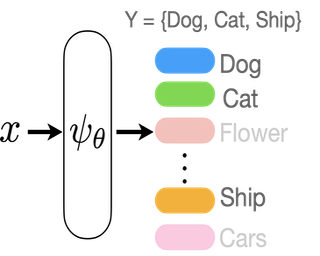
Few-shot learning is a central problem in meta-learning, where learners must quickly adapt to new tasks given limited training data. Recently, feature pre-training has become a ubiquitous component in state-of-the-art meta-learning methods and is shown to provide significant performance improvement. However, there is limited theoretical understanding of the connection between pre-training and meta-learning. Further, pre-training requires global labels shared across tasks, which may be unavailable in practice. In this paper, we show why exploiting pre-training is theoretically advantageous for meta-learning, and in particular the critical role of global labels. This motivates us to propose Meta Label Learning (MeLa), a novel meta-learning framework that automatically infers global labels to obtains robust few-shot models. Empirically, we demonstrate that MeLa is competitive with existing methods and provide extensive ablation experiments to highlight its key properties.
Existing deep hierarchical topic models are able to extract semantically meaningful topics from a text corpus in an unsupervised manner and automatically organize them into a topic hierarchy. However, it is unclear how to incorporate prior belief such as knowledge graph to guide the learning of the topic hierarchy. To address this issue, we introduce TopicNet as a deep hierarchical topic model that can inject prior structural knowledge as inductive bias to influence the learning. TopicNet represents each topic as a Gaussian-distributed embedding vector, projects the topics of all layers into a shared embedding space, and explores both the symmetric and asymmetric similarities between Gaussian embedding vectors to incorporate prior semantic hierarchies. With a variational auto-encoding inference network, the model parameters are optimized by minimizing the evidence lower bound and supervised loss via stochastic gradient descent. Experiments on widely used benchmark show that TopicNet outperforms related deep topic models on discovering deeper interpretable topics and mining better document representations.
Generalization to out-of-distribution (OOD) data is one of the central problems in modern machine learning. Recently, there is a surge of attempts to propose algorithms that mainly build upon the idea of extracting invariant features. Although intuitively reasonable, theoretical understanding of what kind of invariance can guarantee OOD generalization is still limited, and generalization to arbitrary out-of-distribution is clearly impossible. In this work, we take the first step towards rigorous and quantitative definitions of 1) what is OOD; and 2) what does it mean by saying an OOD problem is learnable. We also introduce a new concept of expansion function, which characterizes to what extent the variance is amplified in the test domains over the training domains, and therefore give a quantitative meaning of invariant features. Based on these, we prove an OOD generalization error bound. It turns out that OOD generalization largely depends on the expansion function. As recently pointed out by Gulrajani & Lopez-Paz (2020), any OOD learning algorithm without a model selection module is incomplete. Our theory naturally induces a model selection criterion. Extensive experiments on benchmark OOD datasets demonstrate that our model selection criterion has a significant advantage over baselines.
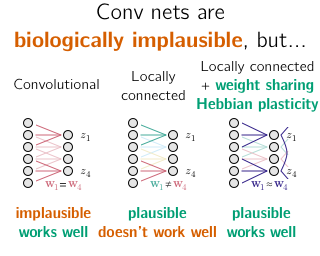
Convolutional networks are ubiquitous in deep learning. They are particularly useful for images, as they reduce the number of parameters, reduce training time, and increase accuracy. However, as a model of the brain they are seriously problematic, since they require weight sharing - something real neurons simply cannot do. Consequently, while neurons in the brain can be locally connected (one of the features of convolutional networks), they cannot be convolutional. Locally connected but non-convolutional networks, however, significantly underperform convolutional ones. This is troublesome for studies that use convolutional networks to explain activity in the visual system. Here we study plausible alternatives to weight sharing that aim at the same regularization principle, which is to make each neuron within a pool react similarly to identical inputs. The most natural way to do that is by showing the network multiple translations of the same image, akin to saccades in animal vision. However, this approach requires many translations, and doesn't remove the performance gap. We propose instead to add lateral connectivity to a locally connected network, and allow learning via Hebbian plasticity. This requires the network to pause occasionally for a sleep-like phase of "weight sharing". This method enables locally connected networks to …
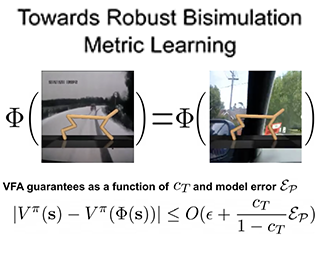
Learned representations in deep reinforcement learning (DRL) have to extract task-relevant information from complex observations, balancing between robustness to distraction and informativeness to the policy. Such stable and rich representations, often learned via modern function approximation techniques, can enable practical application of the policy improvement theorem, even in high-dimensional continuous state-action spaces. Bisimulation metrics offer one solution to this representation learning problem, by collapsing functionally similar states together in representation space, which promotes invariance to noise and distractors. In this work, we generalize value function approximation bounds for on-policy bisimulation metrics to non-optimal policies and approximate environment dynamics. Our theoretical results help us identify embedding pathologies that may occur in practical use. In particular, we find that these issues stem from an underconstrained dynamics model and an unstable dependence of the embedding norm on the reward signal in environments with sparse rewards. Further, we propose a set of practical remedies: (i) a norm constraint on the representation space, and (ii) an extension of prior approaches with intrinsic rewards and latent space regularization. Finally, we provide evidence that the resulting method is not only more robust to sparse reward functions, but also able to solve challenging continuous control tasks with observational …
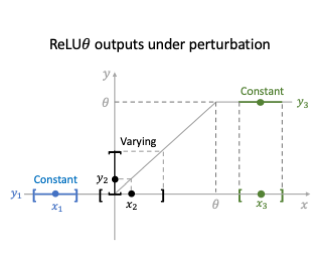
Certified robustness is a desirable property for deep neural networks in safety-critical applications, and popular training algorithms can certify robustness of a neural network by computing a global bound on its Lipschitz constant. However, such a bound is often loose: it tends to over-regularize the neural network and degrade its natural accuracy. A tighter Lipschitz bound may provide a better tradeoff between natural and certified accuracy, but is generally hard to compute exactly due to non-convexity of the network. In this work, we propose an efficient and trainable \emph{local} Lipschitz upper bound by considering the interactions between activation functions (e.g. ReLU) and weight matrices. Specifically, when computing the induced norm of a weight matrix, we eliminate the corresponding rows and columns where the activation function is guaranteed to be a constant in the neighborhood of each given data point, which provides a provably tighter bound than the global Lipschitz constant of the neural network. Our method can be used as a plug-in module to tighten the Lipschitz bound in many certifiable training algorithms. Furthermore, we propose to clip activation functions (e.g., ReLU and MaxMin) with a learnable upper threshold and a sparsity loss to assist the network to achieve an …
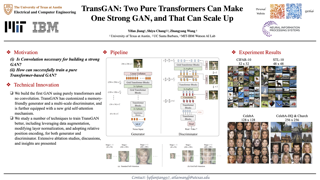

We study a class of computer vision settings wherein one can modify the design of the objects being recognized. We develop a framework that leverages this capability---and deep networks' unusual sensitivity to input perturbations---to design ``robust objects,'' i.e., objects that are explicitly optimized to be confidently classified. Our framework yields improved performance on standard benchmarks, a simulated robotics environment, and physical-world experiments.
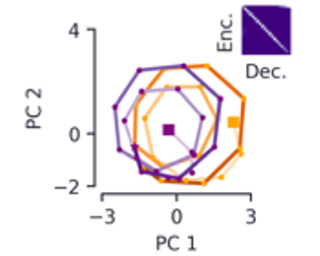
Encoder-decoder networks with attention have proven to be a powerful way to solve many sequence-to-sequence tasks. In these networks, attention aligns encoder and decoder states and is often used for visualizing network behavior. However, the mechanisms used by networks to generate appropriate attention matrices are still mysterious. Moreover, how these mechanisms vary depending on the particular architecture used for the encoder and decoder (recurrent, feed-forward, etc.) are also not well understood. In this work, we investigate how encoder-decoder networks solve different sequence-to-sequence tasks. We introduce a way of decomposing hidden states over a sequence into temporal (independent of input) and input-driven (independent of sequence position) components. This reveals how attention matrices are formed: depending on the task requirements, networks rely more heavily on either the temporal or input-driven components. These findings hold across both recurrent and feed-forward architectures despite their differences in forming the temporal components. Overall, our results provide new insight into the inner workings of attention-based encoder-decoder networks.
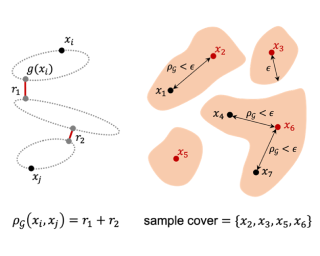
Machine learning models that are developed to be invariant under certain types of data transformations have shown improved generalization in practice. However, a principled understanding of why invariance benefits generalization is limited. Given a dataset, there is often no principled way to select "suitable" data transformations under which model invariance guarantees better generalization. This paper studies the generalization benefit of model invariance by introducing the sample cover induced by transformations, i.e., a representative subset of a dataset that can approximately recover the whole dataset using transformations. For any data transformations, we provide refined generalization bounds for invariant models based on the sample cover. We also characterize the "suitability" of a set of data transformations by the sample covering number induced by transformations, i.e., the smallest size of its induced sample covers. We show that we may tighten the generalization bounds for "suitable" transformations that have a small sample covering number. In addition, our proposed sample covering number can be empirically evaluated and thus provides a guidance for selecting transformations to develop model invariance for better generalization. In experiments on multiple datasets, we evaluate sample covering numbers for some commonly used transformations and show that the smaller sample covering number for …
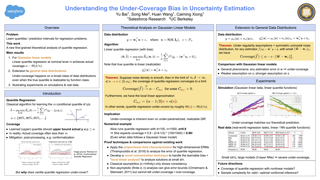
Unsupervised reinforcement learning aims to acquire skills without prior goal representations, where an agent automatically explores an open-ended environment to represent goals and learn the goal-conditioned policy. However, this procedure is often time-consuming, limiting the rollout in some potentially expensive target environments. The intuitive approach of training in another interaction-rich environment disrupts the reproducibility of trained skills in the target environment due to the dynamics shifts and thus inhibits direct transferring. Assuming free access to a source environment, we propose an unsupervised domain adaptation method to identify and acquire skills across dynamics. Particularly, we introduce a KL regularized objective to encourage emergence of skills, rewarding the agent for both discovering skills and aligning its behaviors respecting dynamics shifts. This suggests that both dynamics (source and target) shape the reward to facilitate the learning of adaptive skills. We also conduct empirical experiments to demonstrate that our method can effectively learn skills that can be smoothly deployed in target.
We present Deep Region Competition (DRC), an algorithm designed to extract foreground objects from images in a fully unsupervised manner. Foreground extraction can be viewed as a special case of generic image segmentation that focuses on identifying and disentangling objects from the background. In this work, we rethink the foreground extraction by reconciling energy-based prior with generative image modeling in the form of Mixture of Experts (MoE), where we further introduce the learned pixel re-assignment as the essential inductive bias to capture the regularities of background regions. With this modeling, the foreground-background partition can be naturally found through Expectation-Maximization (EM). We show that the proposed method effectively exploits the interaction between the mixture components during the partitioning process, which closely connects to region competition, a seminal approach for generic image segmentation. Experiments demonstrate that DRC exhibits more competitive performances on complex real-world data and challenging multi-object scenes compared with prior methods. Moreover, we show empirically that DRC can potentially generalize to novel foreground objects even from categories unseen during training.

Contrastive self-supervised learning has largely narrowed the gap to supervised pre-training on ImageNet. However, its success highly relies on the object-centric priors of ImageNet, i.e., different augmented views of the same image correspond to the same object. Such a heavily curated constraint becomes immediately infeasible when pre-trained on more complex scene images with many objects. To overcome this limitation, we introduce Object-level Representation Learning (ORL), a new self-supervised learning framework towards scene images. Our key insight is to leverage image-level self-supervised pre-training as the prior to discover object-level semantic correspondence, thus realizing object-level representation learning from scene images. Extensive experiments on COCO show that ORL significantly improves the performance of self-supervised learning on scene images, even surpassing supervised ImageNet pre-training on several downstream tasks. Furthermore, ORL improves the downstream performance when more unlabeled scene images are available, demonstrating its great potential of harnessing unlabeled data in the wild. We hope our approach can motivate future research on more general-purpose unsupervised representation learning from scene data.

Despite achieving remarkable efficiency, traditional network pruning techniques often follow manually-crafted heuristics to generate pruned sparse networks. Such heuristic pruning strategies are hard to guarantee that the pruned networks achieve test accuracy comparable to the original dense ones. Recent works have empirically identified and verified the Lottery Ticket Hypothesis (LTH): a randomly-initialized dense neural network contains an extremely sparse subnetwork, which can be trained to achieve similar accuracy to the former. Due to the lack of theoretical evidence, they often need to run multiple rounds of expensive training and pruning over the original large networks to discover the sparse subnetworks with low accuracy loss. By leveraging dynamical systems theory and inertial manifold theory, this work theoretically verifies the validity of the LTH. We explore the possibility of theoretically lossless pruning as well as one-time pruning, compared with existing neural network pruning and LTH techniques. We reformulate the neural network optimization problem as a gradient dynamical system and reduce this high-dimensional system onto inertial manifolds to obtain a low-dimensional system regarding pruned subnetworks. We demonstrate the precondition and existence of pruned subnetworks and prune the original networks in terms of the gap in their spectrum that make the subnetworks have the …
Given the ubiquity of deep neural networks, it is important that these models do not reveal information about sensitive data that they have been trained on. In model inversion attacks, a malicious user attempts to recover the private dataset used to train a supervised neural network. A successful model inversion attack should generate realistic and diverse samples that accurately describe each of the classes in the private dataset. In this work, we provide a probabilistic interpretation of model inversion attacks, and formulate a variational objective that accounts for both diversity and accuracy. In order to optimize this variational objective, we choose a variational family defined in the code space of a deep generative model, trained on a public auxiliary dataset that shares some structural similarity with the target dataset. Empirically, our method substantially improves performance in terms of target attack accuracy, sample realism, and diversity on datasets of faces and chest X-ray images.

This paper proposes a method to visualize the discrimination power of intermediate-layer visual patterns encoded by a DNN. Specifically, we visualize (1) how the DNN gradually learns regional visual patterns in each intermediate layer during the training process, and (2) the effects of the DNN using non-discriminative patterns in low layers to construct disciminative patterns in middle/high layers through the forward propagation. Based on our visualization method, we can quantify knowledge points (i.e. the number of discriminative visual patterns) learned by the DNN to evaluate the representation capacity of the DNN. Furthermore, this method also provides new insights into signal-processing behaviors of existing deep-learning techniques, such as adversarial attacks and knowledge distillation.
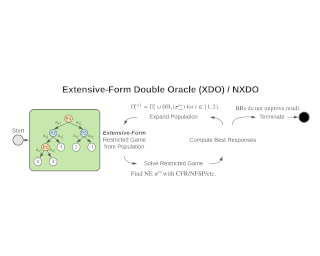
Policy Space Response Oracles (PSRO) is a reinforcement learning (RL) algorithm for two-player zero-sum games that has been empirically shown to find approximate Nash equilibria in large games. Although PSRO is guaranteed to converge to an approximate Nash equilibrium and can handle continuous actions, it may take an exponential number of iterations as the number of information states (infostates) grows. We propose Extensive-Form Double Oracle (XDO), an extensive-form double oracle algorithm for two-player zero-sum games that is guaranteed to converge to an approximate Nash equilibrium linearly in the number of infostates. Unlike PSRO, which mixes best responses at the root of the game, XDO mixes best responses at every infostate. We also introduce Neural XDO (NXDO), where the best response is learned through deep RL. In tabular experiments on Leduc poker, we find that XDO achieves an approximate Nash equilibrium in a number of iterations an order of magnitude smaller than PSRO. Experiments on a modified Leduc poker game and Oshi-Zumo show that tabular XDO achieves a lower exploitability than CFR with the same amount of computation. We also find that NXDO outperforms PSRO and NFSP on a sequential multidimensional continuous-action game. NXDO is the first deep RL method that …
I consider the setting where reviewers offer very noisy scores for a number of items for the selection of high-quality ones (e.g., peer review of large conference proceedings) whereas the owner of these items knows the true underlying scores but prefers not to provide this information. To address this withholding of information, in this paper, I introduce the Isotonic Mechanism, a simple and efficient approach to improving on the imprecise raw scores by leveraging certain information that the owner is incentivized to provide. This mechanism takes as input the ranking of the items from best to worst provided by the owner, in addition to the raw scores provided by the reviewers. It reports adjusted scores for the items by solving a convex optimization problem. Under certain conditions, I show that the owner's optimal strategy is to honestly report the true ranking of the items to her best knowledge in order to maximize the expected utility. Moreover, I prove that the adjusted scores provided by this owner-assisted mechanism are indeed significantly moreaccurate than the raw scores provided by the reviewers. This paper concludes with several extensions of the Isotonic Mechanism and some refinements of the mechanism for practical considerations.
Latinx in AI Social Tue 7 Dec 06:00 p.m.
Latinx in AI wants to host a social event with the goal of creating new connections between the NeurIPS community and Latinx researchers across the world. Our event will consist of networking sessions between attendees in Zoom or Gathertown. While our event will target researchers who identify as Latinx, our doors are open to anyone who wants to engage with our community.
The organizers of the event will be Luis Lamb - Federal University of Rio Grande do Sul - luisl@latinxinai.org José Luis Lima de Jesus Silva - Linköping University - jsilva@latinxinai.org Andrés Muñoz Medina - Google Research - andresm@latinxinai.org
Social: Can Technology Be Used to Help Combat Maternal Mortality? Tue 7 Dec 08:00 p.m.
Women in the United States are more likely to die from childbirth or pregnancy-related causes than other women in the developed world” according to the Public Health Grand Rounds podcast by the Centers for Disease Control. Although, maternal mortality is a global issue the focus will be on maternal mortality in the United States due to familiarity with domestic practices related to this topic. For instance, in 2015 the maternal mortality rate in Finland was 3 deaths/100,000 live births versus in the United States which had 14 deaths/100,000 live births according to the World Factbook from the Central Intelligence Agency. The reason that the number is high for the United States is due to the number of black women that have died and continue to die in the US, due to maternal mortality. “Black women have a maternal mortality rate three times higher than that of white women” according to National Geographic. A question that may arise from many when learning of this data is: why are these deaths occurring at such high rates? A next question for many may be: are these deaths preventable? ". The Public Health Grand Rounds podcast by the Centers for Disease Control podcast further states "research suggests half of these deaths are preventable". Research suggests that there are patterns that could be identified preventing death.
AI could be a pathway forward for preventing maternal mortality. We as a community have a unique opportunity to brainstorm and discuss strategies for combating maternal mortality. The discussion will highlight the United States as a test case and the obtained insights could also be used in other parts of the world. The current idea for a proposed workflow for using AI to address this issue entails using wearable devices that could monitor women for potentially critical periods of time after childbirth and take certain measurements. The collected data could be analyzed using Machine or Deep Learning, and classifications from this data could be used to alert members of a medical care team.
During this session through conversation, dedicated reflection time, and creation of action plans we as a community will have an opportunity to explore what are ways that AI in conjunction with other resources can be used to address this ongoing and worsening issue.
Social: Women in Research Roundtable Tue 7 Dec 08:00 p.m.
This roundtable aims to highlight the experiences of women researchers in tech and promote an engaging discussion around how women can excel in the research science field. GRT will incorporate a minimum of 4 Women researchers who are considered experts in their field at Amazon. Attendees will be encouraged to ask questions while a moderator will facilitate guided discussion points throughout the 1 hour session. I would like to add this RSVP link somewhere so that we can gather any questions ahead of time.
Invited Talk: Gabor Lugosi
Do We Know How to Estimate the Mean?
In this talk I discuss mean estimation based on independent observations, perhaps the most basic problems in statistics. Despite its long history, the subject has attracted a flurry of renewed activity. Motivated by applications in machine learning and data science, the problem has been viewed from new angles both from statistical and computational points of view. We review some recent results on the statistical performance of mean estimators that allow heavy tails and adversarial contamination in the data, focusing on high-dimensional aspects.
Bio :